Behavioural Impacts of Anthropogenic Noise on The
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
On the Larval Development of Some Hermit Crabs from Hokkaido, Japan, Reared Under Laboratory Conditions Title (Decapoda : Anomura) (With 33 Text-Figures and 7 Tables)
On the Larval Development of Some Hermit Crabs from Hokkaido, Japan, Reared Under Laboratory Conditions Title (Decapoda : Anomura) (With 33 Text-figures and 7 Tables) Author(s) QUINTANA, Rodolfo; IWATA, Fumio Citation 北海道大學理學部紀要, 25(1), 25-85 Issue Date 1987-10 Doc URL http://hdl.handle.net/2115/27702 Type bulletin (article) File Information 25(1)_P25-85.pdf Instructions for use Hokkaido University Collection of Scholarly and Academic Papers : HUSCAP On the Larval Development of Some Hermit Crabs from Hokkaido, Japan, Reared Under Laboratory Conditions (Decapoda: Anomura) By Rodolfo Quintana and Fumio Iwata Zoological Institute, Faculty of Science, Hokkaido University, Sapporo 060, Japan. (With 33 Text-figures and 7 Tables) Introduction Descriptive accounts of larvae of a number of Diogenidae and Paguridae species from different geographic regions have been given -among others-, by MacDonald, Pike and Williamson, (1957); Pike and Williamson (1960); Proven zano (1963; 1968a ); Makarov (1967); Roberts (1970; 1973); Biffar and Proven zano (1972); Nyblade and McLaughlin (1975); Hong (1981), but our knowledge of larvae of species of both families from Japan is still deficient. The list of anomuran crabs inhabiting the coasts of Hokkaido, northern Japan includes approximately 15 species of hermit crabs (Igarashi, 1970; Miyake, 1982), for which only some reports have been published on their larval stages, so that the larvae of several of these species (especially those of the genus Paguristes and approximately the 50% of the Pagurus species) remain so far unknown. Kurata (1964) described the larvae of several Pagurus species from the coasts of Hokkaido. In his carefully constructed plankton study, using mainly character- 1) Contribution No.1 from the Oshoro Marine Biological Station, Faculty of Science, Hokkaido University. -
Hermit Crabs. During the Hottest Times of the Day They'll Hide to Avoid the Heat, So Look for Them Under Flotsam and Jetsam and Sea Shore Plants
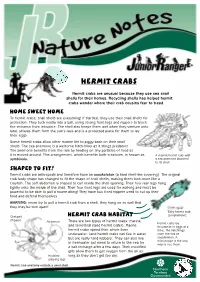
HERMIT CRABS Hermit crabs are unusual because they use sea snail shells for their homes. Recycling shells has helped hermit crabs wander where their crab cousins fear to tread. HOME SWEET HOME To hermit crabs, snail shells are everything! If startled, they use their snail shells for protection. They tuck neatly into a ball, using strong front legs and nippers to block the entrance from intruders. The shell also keeps them wet when they venture onto land, shields them from the sun's rays and is a protected place for them to lay their eggs. Some hermit crabs allow other marine life to piggy-back on their snail shells. The sea anemone is a welcome hitch-hiker as it stings predators. The anemone benefits from the ride by feeding on tiny particles of food as it is moved around. This arrangement, which benefits both creatures, is known as A marine hermit crab with symbiosis. a sea anemone attached to its shell. Shaped to fit! Hermit crabs are arthropods and therefore have an exoskeleton (a hard shell-like covering). The original crab body shape has changed to fit the shape of snail shells, making them look more like a crayfish. The soft abdomen is shaped to curl inside the shell opening. Their four rear legs hang tightly onto the inside of the shell. Their four front legs are used for walking and must be powerful to be able to pull a house along! They have two front nippers used to cut up their food and defend themselves. WARNING: never try to pull a hermit crab from a shell; they hang on so well that they may be torn apart! Close up of Hermit crab habitat baby hermit crab Cheliped (zooplankton). -

How to Become a Crab: Phenotypic Constraints on a Recurring Body Plan
Preprints (www.preprints.org) | NOT PEER-REVIEWED | Posted: 25 December 2020 doi:10.20944/preprints202012.0664.v1 How to become a crab: Phenotypic constraints on a recurring body plan Joanna M. Wolfe1*, Javier Luque1,2,3, Heather D. Bracken-Grissom4 1 Museum of Comparative Zoology and Department of Organismic & Evolutionary Biology, Harvard University, 26 Oxford St, Cambridge, MA 02138, USA 2 Smithsonian Tropical Research Institute, Balboa–Ancon, 0843–03092, Panama, Panama 3 Department of Earth and Planetary Sciences, Yale University, New Haven, CT 06520-8109, USA 4 Institute of Environment and Department of Biological Sciences, Florida International University, Biscayne Bay Campus, 3000 NE 151 Street, North Miami, FL 33181, USA * E-mail: [email protected] Summary: A fundamental question in biology is whether phenotypes can be predicted by ecological or genomic rules. For over 140 years, convergent evolution of the crab-like body plan (with a wide and flattened shape, and a bent abdomen) at least five times in decapod crustaceans has been known as ‘carcinization’. The repeated loss of this body plan has been identified as ‘decarcinization’. We offer phylogenetic strategies to include poorly known groups, and direct evidence from fossils, that will resolve the pattern of crab evolution and the degree of phenotypic variation within crabs. Proposed ecological advantages of the crab body are summarized into a hypothesis of phenotypic integration suggesting correlated evolution of the carapace shape and abdomen. Our premise provides fertile ground for future studies of the genomic and developmental basis, and the predictability, of the crab-like body form. Keywords: Crustacea, Anomura, Brachyura, Carcinization, Phylogeny, Convergent evolution, Morphological integration 1 © 2020 by the author(s). -

Hermit Crab Care
HERMIT CRAB BASIC CRAB CARE Just the Basics To live comfortably in captivity, hermit crabs require the following: no lower than 75°F. Consistent low temperatures can kill a hermit crab. Don't allow them to bake in a window, either. If they get too hot they will die, overheating causes irreversible damage and a slow, painful death. Signs of overheating are a musty smell and discharge of brown liquid; crabitat to have a moist, "tropical" feel to it; at it negates the effects of your under- tank heater. If you are having trouble keeping your crabitat warm, try moving some substrate from over the heater. If you are having trouble getting the crabitat to cool down, turn off the heater. See the molting page if you need information on heating a molter's isolation tank; Food, water, shells and other tank decorations to keep the crabs engaged and active. Friends I'm sure you've heard this before, but you really shouldn't keep only one hermit crab alone as a pet. The name 'hermit' is misapplied to our little friends -- they are quite gregarious and like to be around their own kind. In the wild, they travel in packs of up to 100 crabs, scavenging the beach for food and shells. The reason they travel in packs is simple: Where there are more crabs, there are more shells. Researchers have found by putting one clean, empty shell on the beach, they can initiate a "cascade" of shells changes: One crab changes in to the new shell, another changes into his old shell, and another changes into the other empty shell, and so on. -

Redalyc.Utilization of Shells of the Snail Achatina Fulica Bowdich, 1822
Investigaciones Marinas ISSN: 0716-1069 [email protected] Pontificia Universidad Católica de Valparaíso Chile Sant'Anna, Bruno S.; Zangrande, Cilene M.; Reigada, Alvaro L.D. Utilization of shells of the snail Achatina fulica Bowdich, 1822 (Mollusca, Gastropoda) by the hermit crab Clibanarius vittatus (Bosc, 1802) (Decapoda, Anomura) in the São Vicente Estuary, São Paulo, Brazil Investigaciones Marinas, vol. 33, núm. 2, noviembre, 2005, pp. 217-219 Pontificia Universidad Católica de Valparaíso Valparaíso, Chile Available in: http://www.redalyc.org/articulo.oa?id=45633210 How to cite Complete issue Scientific Information System More information about this article Network of Scientific Journals from Latin America, the Caribbean, Spain and Portugal Journal's homepage in redalyc.org Non-profit academic project, developed under the open access initiative Invest. Mar., Valparaíso, 33(2): 217-219,Utilization 2005 of the snail Achatina fulica by Clibanarius vittatus 217 Nota Científica Utilization of shells of the snail Achatina fulica Bowdich, 1822 (Mollusca, Gastropoda) by the hermit crab Clibanarius vittatus (Bosc, 1802) (Decapoda, Anomura) in the São Vicente Estuary, São Paulo, Brazil Bruno S. Sant’Anna, Cilene M. Zangrande & Alvaro L.D. Reigada Research Group in Crustacean Biology (Crusta), Campus do Litoral Paulista Universidade Estadual Paulista, Praça Infante D. Henrique s/n 11330-900 São Vicente (SP), Brazil ABSTRACT. Hermit crabs depend on mollusc shells for housing. In this study, an unusual resource is reported for a hermit crab that usually inhabits marine gastropod shells. During a field study conducted from May 2001 to April 2003 in an estuarine area in São Vicente, state of São Paulo, Brazil, 21 individuals of Clibanarius vittatus (Bosc, 1802) were found inhabiting the shells of the terrestrial gastropod Achatina fulica Bowdich, 1822. -

Crustacean Critters Summary Concepts Students Will Have the Opportunity to Work with Live Hermit Crabs in There Are Many Different Their Classroom
SANDY SHORES Crustacean Critters Summary Concepts Students will have the opportunity to work with live hermit crabs in There are many different their classroom. They will learn what it takes to keep a hermit crab, types of crustaceans. as well as, all other animals happy and healthy in their habitat. Crabs, lobsters, shrimp, prawns, and barnacle are some types of crustaceans. Objectives Crustaceans share many • Students will discover the four basic things that all animals of the same physical need to survive. characteristics, but some • Students will be able to identify the abiotic and biotic have unique features of components of a hermit crabs sandy shore habitat. their own. All animals • Students will be able to describe how hermit crabs are including crustaceans adapted to live on the sandy shore habitat. have special needs that ensure their survival. Materials Activity 1: Habitat Huddle Standards Addressed 1 large piece of chart paper or board in front of classroom 2.1.1 Activity 2: Crustacean Drawing 2.3.1 5-10 pictures or specimens (can be bought at the market or just use 2.5.1 toy models) of different types of crustaceans such as crabs, lobsters, hermit crabs, and shrimp. Duration 2 pieces of chart paper 1 hour drawing paper for each student Source Material Making Connections MARE Sandy Shores Students may recall seeing different types of crustacean during visits to the sandy shore. Learning about the different kinds of crustaceans Vocabulary and how their similar or different will help students to identify the Crustaceans various adaptations and characteristics that make the sandy shore a Antennae suitable habitat for some and not for others. -

<I>Petrolisthes Armatus</I>
Clemson University TigerPrints Publications Biological Sciences 10-2017 Reproductive performance of the marine green porcelain crab Petrolisthes armatus Gibbes, 1850 in its introduced range favors further range expansion Ann Wassick College of Charleston J. Antonio Baeza Clemson University, [email protected] Amy Fowler George Mason University Dara Wilber College of Charleston Follow this and additional works at: https://tigerprints.clemson.edu/bio_pubs Part of the Biology Commons Recommended Citation Please use the publisher's recommended citation. http://www.aquaticinvasions.net/index.html This Article is brought to you for free and open access by the Biological Sciences at TigerPrints. It has been accepted for inclusion in Publications by an authorized administrator of TigerPrints. For more information, please contact [email protected]. Aquatic Invasions (2017) Volume 12, Issue 4: 469–485 DOI: https://doi.org/10.3391/ai.2017.12.4.05 Open Access © 2017 The Author(s). Journal compilation © 2017 REABIC Research Article Reproductive performance of the marine green porcelain crab Petrolisthes armatus Gibbes, 1850 in its introduced range favors further range expansion Ann Wassick1,*, J. Antonio Baeza2,3,4, Amy Fowler5,6 and Dara Wilber1 1Grice Marine Laboratory, College of Charleston, 205 Ft. Johnson Road, Charleston, South Carolina, 29412 USA 2Department of Biological Sciences, 132 Long Hall, Clemson University, Clemson, South Carolina, 29634 USA 3Smithsonian Marine Station at Fort Pierce, 701 Seaway Drive, Fort Pierce, Florida 34949 USA 4Departamento de Biología Marina, Facultad de Ciencias del Mar, Universidad Católica del Norte, Larrondo 1281, Coquimbo, Chile 5Department of Environmental Science and Policy, George Mason University, 400 University Drive, Fairfax, VA 22030 USA 6Smithsonian Environmental Research Center, 647 Contees Wharf Road, Edgewater, MD 21037 USA *Corresponding author E-mail: [email protected] Received: Received: 21 February 2017 / Accepted: 1 August 2017 / Published online: 6 October 2017 Handling editor: April M.H. -

Cyclura Cychlura) in the Exuma Islands, with a Dietary Review of Rock Iguanas (Genus Cyclura)
Herpetological Conservation and Biology 11(Monograph 6):121–138. Submitted: 15 September 2014; Accepted: 12 November 2015; Published: 12 June 2016. FOOD HABITS OF NORTHERN BAHAMIAN ROCK IGUANAS (CYCLURA CYCHLURA) IN THE EXUMA ISLANDS, WITH A DIETARY REVIEW OF ROCK IGUANAS (GENUS CYCLURA) KIRSTEN N. HINES 3109 Grand Ave #619, Coconut Grove, Florida 33133, USA e-mail: [email protected] Abstract.—This study examined the natural diet of Northern Bahamian Rock Iguanas (Cyclura cychlura) in the Exuma Islands. The diet of Cyclura cychlura in the Exumas, based on fecal samples (scat), encompassed 74 food items, mainly plants but also animal matter, algae, soil, and rocks. This diet can be characterized overall as diverse. However, within this otherwise broad diet, only nine plant species occurred in more than 5% of the samples, indicating that the iguanas concentrate feeding on a relatively narrow core diet. These nine core foods were widely represented in the samples across years, seasons, and islands. A greater variety of plants were consumed in the dry season than in the wet season. There were significant differences in parts of plants eaten in dry season versus wet season for six of the nine core plants. Animal matter occurred in nearly 7% of samples. Supported by observations of active hunting, this result suggests that consumption of animal matter may be more important than previously appreciated. A synthesis of published information on food habits suggests that these results apply generally to all extant Cyclura species, although differing in composition of core and overall diets. Key Words.—Bahamas; Caribbean; carnivory; diet; herbivory; predation; West Indian Rock Iguanas INTRODUCTION versus food eaten in unaffected areas on the same island, finding differences in both diet and behavior (Hines Northern Bahamian Rock Iguanas (Cyclura cychlura) 2011). -

PDF, 126 Pages
THE INCOMPLETE GUIDE TO THE WILDLIFE OF SAINT MARTIN BY MARK YOKOYAMA COPYRIGHT 2010 BY MARK YOKOYAMA ISBN: 978-1453861158 VERSION 1.1 - NOVEMBER 2010 THE INCOMPLETE GUIDE TO THE WILDLIFE OF SAINT MARTIN 3 A view of Pointe des Froussards from Bell Hill with Rocher Marcel in the foreground. Scrubland near the coast gives way to dry tropical forest. IntroductIon tail. This is particularly true of species and varieties that are endemic either to this island or restricted to the Less- As you may have guessed from the title, this feld guide er Antilles. I believe this to be a valuable approach to is not a comprehensive guide to the wildlife of St. Mar- the wildlife of this island. For example, many bird spe- tin. Such a guide would be much longer and require cies on the island are common throughout the Americas signifcantly more expertise in a variety of areas. The and information about them is readily available from species included are restricted primarily to those which a variety of sources. On the other hand, several of the I have personally seen and photographed. That said, this lizard species here are limited to just a few small islands guide does include most of the species one is likely to and have been the subject of far less study. see when visiting the island. This volume concludes with some notes on conserva- Certain taxa are covered briefy, and many species are tion and descriptions of some representative natural omitted entirely. The content has been researched and habitats on the island. -

Invertebrate ID Guide
11/13/13 1 This book is a compilation of identification resources for invertebrates found in stomach samples. By no means is it a complete list of all possible prey types. It is simply what has been found in past ChesMMAP and NEAMAP diet studies. A copy of this document is stored in both the ChesMMAP and NEAMAP lab network drives in a folder called ID Guides, along with other useful identification keys, articles, documents, and photos. If you want to see a larger version of any of the images in this document you can simply open the file and zoom in on the picture, or you can open the original file for the photo by navigating to the appropriate subfolder within the Fisheries Gut Lab folder. Other useful links for identification: Isopods http://www.19thcenturyscience.org/HMSC/HMSC-Reports/Zool-33/htm/doc.html http://www.19thcenturyscience.org/HMSC/HMSC-Reports/Zool-48/htm/doc.html Polychaetes http://web.vims.edu/bio/benthic/polychaete.html http://www.19thcenturyscience.org/HMSC/HMSC-Reports/Zool-34/htm/doc.html Cephalopods http://www.19thcenturyscience.org/HMSC/HMSC-Reports/Zool-44/htm/doc.html Amphipods http://www.19thcenturyscience.org/HMSC/HMSC-Reports/Zool-67/htm/doc.html Molluscs http://www.oceanica.cofc.edu/shellguide/ http://www.jaxshells.org/slife4.htm Bivalves http://www.jaxshells.org/atlanticb.htm Gastropods http://www.jaxshells.org/atlantic.htm Crustaceans http://www.jaxshells.org/slifex26.htm Echinoderms http://www.jaxshells.org/eich26.htm 2 PROTOZOA (FORAMINIFERA) ................................................................................................................................ 4 PORIFERA (SPONGES) ............................................................................................................................................... 4 CNIDARIA (JELLYFISHES, HYDROIDS, SEA ANEMONES) ............................................................................... 4 CTENOPHORA (COMB JELLIES)............................................................................................................................ -
Hermit Crabs: Their Distribution, Abundance, Population Structure and Associations in the Southern Benguela
Deep water parapagurid hermit crabs: their distribution, abundance, population structure and associations in the Southern Benguela Amy Grace Wright A dissertation submitted in fulfilment of the degree of Master of Science in the Department of Biological Sciences, Faculty of Science, University of Cape Town University of Cape Town Supervisor: Emeritus Professor Charles L. Griffiths January 2017 1 The copyright of this thesis vests in the author. No quotation from it or information derived from it is to be published without full acknowledgement of the source. The thesis is to be used for private study or non- commercial research purposes only. Published by the University of Cape Town (UCT) in terms of the non-exclusive license granted to UCT by the author. University of Cape Town Acknowledgements “It is a dangerous business, Frodo, going out your door…” It’s an adventurous business to be sure, to set off on an adventure like an MSc by dissertation, working on animals very few people have studied before, and none of which I would see alive. And what sort of adventure would it be without a little danger, a little rain and a little fire? I could not have gone there and back again without the guidance, support, humour and wisdom of my ever patient supervisor, Emeritus Professor Charles Griffiths. I am forever grateful for your lessons on science, life and joy. To my merry band of fellow Team Hermit conspirators – Jannes, Arno, Jackson and Robyn – thank you for your hard work and enthusiasm for interesting questions, zoanthid “goo” and decapods in general. Hats off to Lara Atkinson for her organisation and advice, to Tracey Fairweather for data, proof reads and guidance, and to the collection team from DAFF, who go to sea come-what-may and who started collecting “monkey nuts” all those years ago. -

NAFO Scientific Council Number 34: 7-17
NAPO Sci. Coun. Studies, 34: 7-17 On Biology of Two Sympatric Species of Hermit Crab (Crustacea, Decapoda, Paguridae) at St. Chads, Newfoundland H. J. Squires 14 Solomons Drung, Portugal Cove-St. Philips Newfoundland, Canada AIM 2C5 and G. P. EDDis and G. Dawe Science Branch, Dept. of Fisheries and Oceans, P.O. Box 5667 St. John's, Newfoundland, Canada AIC 5XI Abstract Two sympatrk species of Hermit Crab, Pagurus aeadianus and P. arcuatus, from the sublittoral near St. Chads, Newfoundland, have many similarities in their life history. These are expressed in their feeding, maturities of females (both species hatching eggs in early spring. extruding eggs in late autumn and carrying eggs through the winter), finding shells plentiful at small sizes but scarce at large sizes, and availability at a sublittoral station throughout the year. Differences seen were low rate of parasitization with Peltogaster paguri in P aeadianus: only one in almost five hundred specimens, while there were about 18% in P arcuatus; and in the former slightly higher fecundity, longer period of male maturity, somewhat larger size, and, as shown earlier, lower frequency in plankton from the area. Percent of ectocommensal protozoans on gills was low in P aeadianus but high in P areuatus, while those on setae of maxillule were high in both species. Key words: Crustacea. ectocommensal protozoa, fecundity, feeding, hermit crabs, maturity, Newfoundland, Pagurus aeadianus, P arcuatus. Peltogaster parasite Introduction Squires, 1964, anomuran decapods of the Family Paguridae (McLaughlin, 1974). They are both found While hermit crabs are not likely to be of only in the Northwest Atlantic and not much farther commercial importance like snow crabs, lobsters and north than the Straits of Belle Isle in our records, shrimps in Newfoundland waters, they belong to the although the northerly range of P arcuatus is said to same group of crustaceans, and they contribute be Greenland (Williams, 1984).