A Spatial Analysis of NBA Shot Locations
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

NBA Feature Story
2018-19 NBA Season Already a Wild One By: Isaac Tomoletz On Tuesday, October 16, 2018, the NBA regular season officially started. Before the season started, there were some big moves by players and teams in this past offseason. Starting with the back-to-back Champions, the Golden State Warriors added a big time player to their already stacked team, Demarcus Cousins, who missed the majority of the season with a torn achilles. Another big shocking move was made by two teams, the Toronto Raptors traded star player Demar Derozan for San Antonio Spurs’ Kawhi Leonard. There were also players such as Jimmy Butler of the Minnesota Timberwolves, who wasn’t happy with his current relationship with his team. So many rumors spread about where he’s going. All of these plus other deals and trades such as Carmelo Anthony signing to the Houston Rockets, one of the biggest deals over the summer was former Cavs forward LeBron James signing to the Los Angeles Lakers have fans wondering about the coming season. All of these changes in teams were months ago, but the NBA season is now underway and we have already seen some interesting things. One of the big talks lately has been about the game played on this past Saturday between the Houston Rockets and the Los Angeles Lakers. During the fourth quarter between the two, a foul occured on Brandon Ingram, a player on the Lakers. After the foul, Ingram pushed Rockets guard, James Harden, which resulted in him getting a technical foul. As the situation was being handled, Rajon Rondo of the Lakers and Chris Paul of the Rockets started arguing and then all hell broke loose in the Staples Center in Los Angeles when Rondo threw a punch at Chris Paul and then Ingram hopped in and threw a punch as well. -

NBA Players Word Search
Name: Date: Class: Teacher: NBA Players Word Search CRMONT A ELLISIS A I A HTHOM A S XTGQDWIGHTHOW A RDIBZWLMVG VKEVINDUR A NTBL A KEGRIFFIN YQMJVURVDE A NDREJORD A NNTX CEQBMRRGBHPK A WHILEON A RDB TFJGOUTO A I A SDIRKNOWITZKI IGPOUSBIIYUDPKEVINLOVEXC MKHVSSTDOKL A YTHOMPSONXJF DMDDEESWLEMMP A ULGEORGEEK U A E A MLBYEMIISTEPHENCURRY NNRVJLW A BYL A ODLVIWJVHLER CUOI A WLNRKLNO A LHORFORDMI A GNDMEWEOESLVUBPZK A LSUYE NIWWESNWNG A IKTIMDUNC A NLI KNIESTR A JEPLU A QZPHESRJIR GOLSHBQD A K A LFKYLELOWRYNV HBLT A RDEMWR A ZSERGEIB A K A I DIIYROGDEM A RDEROZ A NGSJBN ZL A HDOKUSLGDCHRISP A ULUXG OIMSEKL A M A RCUS A LDRIDGEDZ VKSWNQXIDR A YMONDGREENYFZ TONYP A RKER A LECHRISBOSH A P AL HORFORD DWYANE WADE ISAIAH THOMAS DEMAR DEROZAN RUSSELL WESTBROOK TIM DUNCAN DAMIAN LILLARD PAUL GEORGE DRAYMOND GREEN LEBRON JAMES KLAY THOMPSON BLAKE GRIFFIN KYLE LOWRY LAMARCUS ALDRIDGE SERGE IBAKA KYRIE IRVING STEPHEN CURRY KEVIN LOVE DWIGHT HOWARD CHRIS BOSH TONY PARKER DEANDRE JORDAN DERON WILLIAMS JOSE BAREA MONTA ELLIS TIM DUNCAN KEVIN DURANT JAMES HARDEN JEREMY LIN KAWHI LEONARD DAVID WEST CHRIS PAUL MANU GINOBILI PAUL MILLSAP DIRK NOWITZKI Free Printable Word Seach www.AllFreePrintable.com Name: Date: Class: Teacher: NBA Players Word Search CRMONT A ELLISIS A I A HTHOM A S XTGQDWIGHTHOW A RDIBZWLMVG VKEVINDUR A NTBL A KEGRIFFIN YQMJVURVDE A NDREJORD A NNTX CEQBMRRGBHPK A WHILEON A RDB TFJGOUTO A I A SDIRKNOWITZKI IGPOUSBIIYUDPKEVINLOVEXC MKHVSSTDOKL A YTHOMPSONXJF DMDDEESWLEMMP A ULGEORGEEK U A E A MLBYEMIISTEPHENCURRY NNRVJLW A BYL A ODLVIWJVHLER -

Chimezie Metu Demar Derozan Taj Gibson Nikola Vucevic
DeMar Chimezie DeRozan Metu Nikola Taj Vucevic Gibson Photo courtesy of Fernando Medina/Orlando Magic 2019-2020 • 179 • USC BASKETBALL USC • In The Pros All-Time The list below includes all former USC players who had careers in the National Basketball League (1937-49), the American Basketball Associa- tion (1966-76) and the National Basketball Association (1950-present). Dewayne Dedmon PLAYER PROFESSIONAL TEAMS SEASONS Dan Anderson Portland .............................................1975-76 Dwight Anderson New York ................................................1983 San Diego ..............................................1984 John Block Los Angeles Lakers ................................1967 San Diego .........................................1968-71 Milwaukee ..............................................1972 Philadelphia ............................................1973 Kansas City-Omaha ..........................1973-74 New Orleans ..........................................1975 Chicago .............................................1975-76 David Bluthenthal Sacramento Kings ..................................2005 Mack Calvin Los Angeles (ABA) .................................1970 Florida (ABA) ....................................1971-72 Carolina (ABA) ..................................1973-74 Denver (ABA) .........................................1975 Virginia (ABA) .........................................1976 Los Angeles Lakers ................................1977 San Antonio ............................................1977 Denver ...............................................1977-78 -

2009 Jordan Brand All-American Team Announced
www.JordanBrandClassic.com Madison Square Garden • New York City • April 18, 2009 FOR IMMEDIATE RELEASE 2009 Jordan Brand All-American Team Announced Madison Square Garden to Host Nation’s Elite High School Basketball Players The top five ESPNU-rated players headline star-filled roster NEW YORK, NY (February 10, 2009) – Jordan Brand, a division of Nike, Inc., announced today during a special ESPNU Selection Show that the top-five ranked ESPNU 100 players – Xavier Henry (Oklahoma City, OK/Memphis), Derrick Favors (Atlanta, GA/Georgia Tech), John Henson (Tampa, FL/North Carolina), DeMarcus Cousins (Mobile, AL/Kentucky) and Renardo Sidney (Los Angeles, CA/USC) – will headline the nation’s best 24 high school senior basketball players at the 2009 Jordan Brand Classic, presented by Foot Locker, at Madison Square Garden on Saturday, April 18 at 8:00 p.m. EST. This year’s event will once again be televised nationally live on ESPN2. The Jordan Brand Classic will also continue to include a regional game, showcasing the top prep players from the New York City metropolitan area in a City vs. Suburbs showdown. In its second year of the event, an International game will tip-off the tripleheader by featuring 16 of the top 17-and-under players from around the world. A portion of the proceeds benefit the New York City-based charity, The Children’s Aid Society. In addition to Henry, Favors, Henson, Cousins and Sidney, the event will also include Kenny Boynton (Plantation, FL/Florida), Avery Bradley (Henderson, NV/Texas), Dominic Cheek (Jersey City, NJ/Villanova), -

Rosters Set for 2014-15 Nba Regular Season
ROSTERS SET FOR 2014-15 NBA REGULAR SEASON NEW YORK, Oct. 27, 2014 – Following are the opening day rosters for Kia NBA Tip-Off ‘14. The season begins Tuesday with three games: ATLANTA BOSTON BROOKLYN CHARLOTTE CHICAGO Pero Antic Brandon Bass Alan Anderson Bismack Biyombo Cameron Bairstow Kent Bazemore Avery Bradley Bojan Bogdanovic PJ Hairston Aaron Brooks DeMarre Carroll Jeff Green Kevin Garnett Gerald Henderson Mike Dunleavy Al Horford Kelly Olynyk Jorge Gutierrez Al Jefferson Pau Gasol John Jenkins Phil Pressey Jarrett Jack Michael Kidd-Gilchrist Taj Gibson Shelvin Mack Rajon Rondo Joe Johnson Jason Maxiell Kirk Hinrich Paul Millsap Marcus Smart Jerome Jordan Gary Neal Doug McDermott Mike Muscala Jared Sullinger Sergey Karasev Jannero Pargo Nikola Mirotic Adreian Payne Marcus Thornton Andrei Kirilenko Brian Roberts Nazr Mohammed Dennis Schroder Evan Turner Brook Lopez Lance Stephenson E'Twaun Moore Mike Scott Gerald Wallace Mason Plumlee Kemba Walker Joakim Noah Thabo Sefolosha James Young Mirza Teletovic Marvin Williams Derrick Rose Jeff Teague Tyler Zeller Deron Williams Cody Zeller Tony Snell INACTIVE LIST Elton Brand Vitor Faverani Markel Brown Jeffery Taylor Jimmy Butler Kyle Korver Dwight Powell Cory Jefferson Noah Vonleh CLEVELAND DALLAS DENVER DETROIT GOLDEN STATE Matthew Dellavedova Al-Farouq Aminu Arron Afflalo Joel Anthony Leandro Barbosa Joe Harris Tyson Chandler Darrell Arthur D.J. Augustin Harrison Barnes Brendan Haywood Jae Crowder Wilson Chandler Caron Butler Andrew Bogut Kentavious Caldwell- Kyrie Irving Monta Ellis -

34 Paul Pierce #32 Blake Griffin #6 Deandre
Los Angeles Clippers (1-0) at Toronto Raptors (0-0) Game P2| Away Game 1 Rogers Arena; Vancouver, BC Sunday, October 4, 2015 - 4:00 p.m. (PDT) TV: Prime Ticket; Radio: The Beast 980 AM/1330 AM KWKW PRESEASON CLIPPERS PROBABLE STARTERS DATE OPPONENT TELEVISION RESULT/TIME Oct. 2 vs. Denver Prime Ticket W, 103-96 Oct. 4 at Toronto* Prime Ticket 4:00 PM #34 PAUL PIERCE Oct. 10 at Charlotte** NBA TV 10:30 PM Oct. 14 vs. Chatlotte*** NBA TV 5:00 AM F • 6-7 • 235 Oct. 20 vs. Golden State ESPN 7:30 PM Oct. 22 vs. Portland Prime Ticket 7:30 PM 2015-16 Preseason Stats *Game will be played in Vancouver, British Columbia **Game will be played in Shenzhen, China MIN PTS REB AST FG% ***Game will be played in Shanghai, China 14.0 5.0 1.0 1.0 .250 REGULAR SEASON LAST GAME: 10/2 vs. DEN, had 5 pts (1-4 FG, 1-2 3PT, 2-2 FT), 1 reb, 1 ast and 2 stls in 14:16 minutes. DATE OPPONENT TELEVISION RESULT/TIME 2014-15 PLAYER NOTES: Posted five games of 20+ points…Led Washington with 118 made three-pointers... Oct. 28 at Sacramento Prime Ticket 7:00 PM Oct. 29 vs. Dallas TNT 7:30 PM On 11/25/14, surpassed Jerry West for 17th all-time in points scored…On 12/8/14 vs. BOS, scored a season- Oct. 31 vs. Sacramento Prime Ticket/NBA TV 7:30 PM high 28 points & surpassed Reggie Miller for 16th all-time in points scored...Became the 4th player in NBA history Nov. -

P18 Layout 1
MONDAY, NOVEMBER 17, 2014 SPORTS Federer sets up Djokovic showdown LONDON: Six-times champion Roger Wawrinka’s nerve failed him again on a Federer survived a late-night Swiss semi- third match point when he could only final thriller against Stanislas Wawrinka on spoon a volley, which Federer fizzed back Saturday to set up an ATP World Tour Finals past him before going on to win the game. showdown against Novak Djokovic. A tiebreak was needed to settle it and After a week of one-sided group stage Wawrinka eeked out another match point, action at London’s O2 Arena, the season- but this time his service return went long. ender burst to life with world number one With the 17,500 fans, many in Swiss red Djokovic battling past Japan’s Kei Nishikori and wearing Federer masks, making a deaf- after a mid-match meltdown before ening din, Federer had the coolest head in Federer saved four match points in a near the cavernous arena, taking the next two three-hour duel with compatriot Wawrinka. points, and the match, with sumptuous Federer eventually prevailed 4-6 7-5 7- drop volleys. “I think I got lucky tonight. 6(6) against the man he will join forces with Stan played better from the baseline and when Switzerland take on France in next that usually does the job on this court,” a week’s Davis Cup final. relieved Federer said. “But I kept fighting. Djokovic, bidding for a third consecutive It’s tough but I’m thrilled to be in another season-ending title having already secured final in London.” the number one ranking, beat Asian trail- blazer Nishikori 6-1 3-6 6-0 after losing his ‘OVER THE LINE’ cool with another capacity crowd at the O2 He will now do battle with Djokovic for a Arena. -

All-Time Roster — 2018-19 USC Trojans Men's Basketball Media
USC • Letterwinners All-Time A Claridge, Philip ....................................... 1931 Aaron, Shaqquan............................... 2017, 18 Clark, Bruce ................................. 1972, 73, 74 Adamson, Chuck ..................................... 1948 Clark, Darion...................................... 2015, 16 Ainley, Charles ................................... 1920, 21 Clemo, Robert Webster .................... 1968, 69 Albrecht, Bob ........................................... 1980 Cobb, Leroy ............................................ 1971 Alleman, Rodney ......................... 1965, 66, 67 Coleman, Ronnie .................. 1988, 89, 90, 91 Allen, Greg............................................... 2012 Connolly, William .................................... 1967 Anchrum, Tremayne ................... 1992, 93, 94 Cooper, Duane ..................... 1988, 89, 91, 92 Anderson, Carl............................. 1936, 37, 38 Craven, Derrick...................... 2002, 03, 04, 05 Anderson, Clarence .................... 1931, 32, 33 Craven, Errick ........................ 2002, 03, 04, 05 Anderson, Dan ............................ 1972, 73, 74 Crenshaw, Donald Ray ..................... 1969, 70 Anderson, Dwight ............................. 1981, 82 Cromwell, RouSean..................... 2006, 07, 08 Anderson, Norman ........................... 1923, 24 Crouse, David ....................... 1993, 95, 96, 97 Androff, Abe ................................ 1947, 48, 49 Cunningham, Kasey .................... 2008, 09, 10 Appel, -

GAME #72 - TORONTO RAPTORS (27-44) Vs
2020-21 FIRST HALF SCHEDULE GAME #72 - TORONTO RAPTORS (27-44) vs. INDIANA PACERS (33-38) SUNDAY, MAY 16, 2021 - 1 P.M. (ET) - AMALIE ARENA Day Date Opponent Time (ET)/Result Wed. Dec. 23 New Orleans L 113-99 TV: TSN RADIO: TSN RADIO 1050 Sat. Dec. 26 at San Antonio L 119-114 Tue. Dec. 29 at Philadelphia L 100-93 TEAM NOTES Thu. Dec. 31 New York W 100-83 Sat. Jan. 2 at New Orleans L 120-116 · The Toronto Raptors host the Indiana Pacers in Tampa on Sunday to complete the 2020-21 season. The Raptors will play Mon. Jan. 4 Boston L 126-114 their 36th home game at Amalie Arena, which is the most relocated games a team has faced since New Orleans Hornets Wed. Jan. 6 at Phoenix L 123-115 (now Pelicans) played 40 games due to hurricane Katrina in 2005-06. New Orleans played 36 games at the Ford Center Fri. Jan. 8 at Sacramento W 144-123 (now Chesapeake Energy Arena) in Oklahoma City and one game each at the Pete Maravich Assembly Center at LSU Sun. Jan. 10 at Golden State L 106-105 and the Lloyd Noble Center in Norman, Oklahoma. The Raptors will maintain Tampa as their headquarters for the up- Mon. Jan. 11 at Portland L 112-111 coming NBA Draft in July due to the on-going Canadian-US border closure. Thu. Jan. 14 Charlotte W 111-108 Sat. Jan. 16 Charlotte W 116-113 · Toronto has used a franchise-high 37 different starting lineups this season. -

Pac-12 NBA Draft History
NATIONAL HONORS PAC-12 IN THE NBA DRAFT Draft began in 1947. 1st Round picks only listed 1980 (10) 1984 (10) from 1967-78 (order prior to 1967 unavailable). 1st 11. Kiki Vandeweghe (UCLA), Dallas 1st 13. Jay Humphries (COLO), Phoenix All picks listed since 1979. 18. Don Collins (WSU), Atlanta 21. Kenny Fields (UCLA), Milwaukee Number in parenthesis after year is rounds of Draft. 2nd 42. Kimberly Belton (STAN), Phoenix 2nd 29. Stuart Gray (UCLA), Indiana 3rd 47. Kurt Nimphius (ASU), Denver 38. Charles Sitton (OSU), Dallas 1967 (20) 50. James Wilkes (UCLA), Chicago 4th 71. Ralph Jackson (UCLA), Indiana 1st (none) 53. Stuart House (WSU), Cleveland 92. John Revelli (STAN), LA Lakers 65. Doug True (CAL), Phoenix 6th 138. Keith Jones (STAN), LA Lakers 1968 (21) 5th 95. Don Carfno (USC), Golden State 7th 141. Butch Hays (CAL), Chicago 1st 11. Bill Hewitt (USC), Los Angeles 103. Darrell Allums (UCLA), Dallas 144. David Brantley (ORE), Clippers 6th 134. Coby Leavitt (UTAH), Phoenix 146. Michael Pitts (CAL), San Antonio 1969 (20) 7th 141. Lorenzo Romar (WASH), Golden State 152. Gary Gatewood (ORE), Seattle 1st 1. Lew Alcindor (UCLA), Milwaukee 148. Greg Sims (UCLA), Portland 8th 177. Chris Winans (UTAH), New Jersey 3. Lucius Allen (UCLA), Seattle 152. Joe Nehls (ARIZ), Houston 1985 (Seven) 1970 (19) 1981 (10) 1st 8. Detlef Schrempf (WASH), Dallas 1st 14. John Vallely (UCLA), Atlanta 1st 7. Steve Johnson (OSU), Kansas City 15. Blair Rasmussen (ORE), Denver 16. Gary Freeman (OSU), Milwaukee 5. Danny Vranes (UTAH), Seattle 23. A.C. Green (OSU), LA Lakers 8. -

June 14 Redemption Update
SET SUBSET/INSERT # PLAYER 2018 Donruss Optic Basketball Rated Rookies Signatures Choice 165 Vincent Edwards 2018 Donruss Optic Basketball Rated Rookies Signatures Choice Black Gold 165 Vincent Edwards 2018 Donruss Optic Basketball Rated Rookies Signatures Gold 165 Vincent Edwards 2018 Donruss Optic Basketball Rated Rookies Signatures Holo 165 Vincent Edwards 2018 18-19 Court Kings Basketball Fresh Paint 23 Rodions Kurucs 2018 18-19 Court Kings Basketball Fresh Paint Jade 23 Rodions Kurucs 2018 18-19 Court Kings Basketball Fresh Paint Masterpiece 23 Rodions Kurucs 2018 18-19 Court Kings Basketball Fresh Paint Ruby 23 Rodions Kurucs 2018 18-19 Court Kings Basketball Fresh Paint Sapphire 23 Rodions Kurucs 2018 18-19 Court Kings Basketball Heir Apparent 5 Rodions Kurucs 2018 18-19 Court Kings Basketball Heir Apparent Ruby 5 Rodions Kurucs 2018 18-19 Court Kings Basketball Heir Apparent Sapphire 5 Rodions Kurucs 2018 Absolute Basketball Glass 15 Kawhi Leonard 2018 Absolute Basketball Glass 9 Jimmy Butler 2018 Absolute Basketball Glass 12 Stephen Curry 2018 Absolute Basketball Glass 18 Kristaps Porzingis 2018 Absolute Basketball Glass 22 Luka Doncic 2018 Absolute Basketball Glass 6 Kyrie Irving 2018 Absolute Basketball Glass 16 Marvin Bagley III 2018 Absolute Basketball Glass 25 Jaren Jackson Jr. 2018 Absolute Basketball Glass 13 James Harden 2018 Absolute Basketball Glass 1 Anthony Davis 2018 Absolute Basketball Glass 7 Devin Booker 2018 Absolute Basketball Glass 4 Kevin Durant 2018 Absolute Basketball Glass 19 Damian Lillard 2018 Absolute -
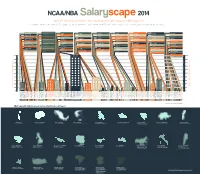
A Complete Breakdown of Every NBA Player's Salary, Where They
$1,422,720 (DonatasMotiejunas,Houston) $3,526,440 (JonasValanciunas,Toronto) Lithuania: $4,949,160 $12,350,000 (SergeIbaka,OklahomaCity) $3,049,920 (BismackBiyombo,Charlotte) Congo: $15,399,920 Total Salaries of Players that Schools Produced in Millions of US Dollars 100M 120M 140M 160M 180M 200M NBA Salary Distribution by Country that Produced Players SalaryDistributionbyCountrythatProduced NBA 20M 40M 60M 80M 947,907 (OmriCasspi,Houston) Israel: $947,907 0M 3 $10,105,855 |Gerald Wallace, Boston $3,250,000 |Alonzo Gee, Cleveland $2,652,000 |Mo Williams, Portland $3,135,000 |Jerryd Bayless, Boston Arizona $1,246,680 |Solomon Hill, Indiana $12,868,632 |Andre Iguodala, Golden State $3,500,000 |Jordan Hill, LA Lakers 10 $6,400,000 |Channing Frye Phoenix $5,625,313 |Jason Terry, Sacramento $5,016,960 |Derrick Williams, Sacramento $5,000,000 |Chase Budinger, Minnesota $226,162 |Mustafa Shaku, Oklahoma City $11,046,000 |Richard Jefferson, Utah Butler Bucknell Brigham Young Boston College Blinn College|$1.4M Belmont |$0.5M Baylor |$7.1M Arkansas-LR |$0.8M Arkansas |$23.1M Arizona State|$16M Arizona |$54M Alabama |$16M 3 $510,000 |Carrick Felix, Cleveland $13,701,250 |James Hardin, Houston $1,750,000 |Jeff Ayres, San Antonio 3 21,466,718 |Joe Johnson 884,293 |Jannero Pargo, Charlotte 1 788,872 |Patrick Beverey, Houston 884,293 |Derek Fisher, Oklahoma City A completebreakdownofeveryNBAplayer’ssalary,wheretheyplayedbeforetheNBA,andwhichschoolscountriesproducehighestnetsalary. 4 4,469,548 |Ekpe Udoh, Milwaukee 788,872 |Quincy Acy, Sacramento 788,872