Resultant and Discriminant of Linear Combination of Polynomials
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Lesson 21 –Resultants
Lesson 21 –Resultants Elimination theory may be considered the origin of algebraic geometry; its history can be traced back to Newton (for special equations) and to Euler and Bezout. The classical method for computing varieties has been through the use of resultants, the focus of today’s discussion. The alternative of using Groebner bases is more recent, becoming fashionable with the onset of computers. Calculations with Groebner bases may reach their limitations quite quickly, however, so resultants remain useful in elimination theory. The proof of the Extension Theorem provided in the textbook (see pages 164-165) also makes good use of resultants. I. The Resultant Let be a UFD and let be the polynomials . The definition and motivation for the resultant of lies in the following very simple exercise. Exercise 1 Show that two polynomials and in have a nonconstant common divisor in if and only if there exist nonzero polynomials u, v such that where and . The equation can be turned into a numerical criterion for and to have a common factor. Actually, we use the equation instead, because the criterion turns out to be a little cleaner (as there are fewer negative signs). Observe that iff so has a solution iff has a solution . Exercise 2 (to be done outside of class) Given polynomials of positive degree, say , define where the l + m coefficients , ,…, , , ,…, are treated as unknowns. Substitute the formulas for f, g, u and v into the equation and compare coefficients of powers of x to produce the following system of linear equations with unknowns ci, di and coefficients ai, bj, in R. -

Solving Cubic Polynomials
Solving Cubic Polynomials 1.1 The general solution to the quadratic equation There are four steps to finding the zeroes of a quadratic polynomial. 1. First divide by the leading term, making the polynomial monic. a 2. Then, given x2 + a x + a , substitute x = y − 1 to obtain an equation without the linear term. 1 0 2 (This is the \depressed" equation.) 3. Solve then for y as a square root. (Remember to use both signs of the square root.) a 4. Once this is done, recover x using the fact that x = y − 1 . 2 For example, let's solve 2x2 + 7x − 15 = 0: First, we divide both sides by 2 to create an equation with leading term equal to one: 7 15 x2 + x − = 0: 2 2 a 7 Then replace x by x = y − 1 = y − to obtain: 2 4 169 y2 = 16 Solve for y: 13 13 y = or − 4 4 Then, solving back for x, we have 3 x = or − 5: 2 This method is equivalent to \completing the square" and is the steps taken in developing the much- memorized quadratic formula. For example, if the original equation is our \high school quadratic" ax2 + bx + c = 0 then the first step creates the equation b c x2 + x + = 0: a a b We then write x = y − and obtain, after simplifying, 2a b2 − 4ac y2 − = 0 4a2 so that p b2 − 4ac y = ± 2a and so p b b2 − 4ac x = − ± : 2a 2a 1 The solutions to this quadratic depend heavily on the value of b2 − 4ac. -

Algorithmic Factorization of Polynomials Over Number Fields
Rose-Hulman Institute of Technology Rose-Hulman Scholar Mathematical Sciences Technical Reports (MSTR) Mathematics 5-18-2017 Algorithmic Factorization of Polynomials over Number Fields Christian Schulz Rose-Hulman Institute of Technology Follow this and additional works at: https://scholar.rose-hulman.edu/math_mstr Part of the Number Theory Commons, and the Theory and Algorithms Commons Recommended Citation Schulz, Christian, "Algorithmic Factorization of Polynomials over Number Fields" (2017). Mathematical Sciences Technical Reports (MSTR). 163. https://scholar.rose-hulman.edu/math_mstr/163 This Dissertation is brought to you for free and open access by the Mathematics at Rose-Hulman Scholar. It has been accepted for inclusion in Mathematical Sciences Technical Reports (MSTR) by an authorized administrator of Rose-Hulman Scholar. For more information, please contact [email protected]. Algorithmic Factorization of Polynomials over Number Fields Christian Schulz May 18, 2017 Abstract The problem of exact polynomial factorization, in other words expressing a poly- nomial as a product of irreducible polynomials over some field, has applications in algebraic number theory. Although some algorithms for factorization over algebraic number fields are known, few are taught such general algorithms, as their use is mainly as part of the code of various computer algebra systems. This thesis provides a summary of one such algorithm, which the author has also fully implemented at https://github.com/Whirligig231/number-field-factorization, along with an analysis of the runtime of this algorithm. Let k be the product of the degrees of the adjoined elements used to form the algebraic number field in question, let s be the sum of the squares of these degrees, and let d be the degree of the polynomial to be factored; then the runtime of this algorithm is found to be O(d4sk2 + 2dd3). -

Arxiv:2004.03341V1
RESULTANTS OVER PRINCIPAL ARTINIAN RINGS CLAUS FIEKER, TOMMY HOFMANN, AND CARLO SIRCANA Abstract. The resultant of two univariate polynomials is an invariant of great impor- tance in commutative algebra and vastly used in computer algebra systems. Here we present an algorithm to compute it over Artinian principal rings with a modified version of the Euclidean algorithm. Using the same strategy, we show how the reduced resultant and a pair of B´ezout coefficient can be computed. Particular attention is devoted to the special case of Z/nZ, where we perform a detailed analysis of the asymptotic cost of the algorithm. Finally, we illustrate how the algorithms can be exploited to improve ideal arithmetic in number fields and polynomial arithmetic over p-adic fields. 1. Introduction The computation of the resultant of two univariate polynomials is an important task in computer algebra and it is used for various purposes in algebraic number theory and commutative algebra. It is well-known that, over an effective field F, the resultant of two polynomials of degree at most d can be computed in O(M(d) log d) ([vzGG03, Section 11.2]), where M(d) is the number of operations required for the multiplication of poly- nomials of degree at most d. Whenever the coefficient ring is not a field (or an integral domain), the method to compute the resultant is given directly by the definition, via the determinant of the Sylvester matrix of the polynomials; thus the problem of determining the resultant reduces to a problem of linear algebra, which has a worse complexity. -

Elements of Chapter 9: Nonlinear Systems Examples
Elements of Chapter 9: Nonlinear Systems To solve x0 = Ax, we use the ansatz that x(t) = eλtv. We found that λ is an eigenvalue of A, and v an associated eigenvector. We can also summarize the geometric behavior of the solutions by looking at a plot- However, there is an easier way to classify the stability of the origin (as an equilibrium), To find the eigenvalues, we compute the characteristic equation: p Tr(A) ± ∆ λ2 − Tr(A)λ + det(A) = 0 λ = 2 which depends on the discriminant ∆: • ∆ > 0: Real λ1; λ2. • ∆ < 0: Complex λ = a + ib • ∆ = 0: One eigenvalue. The type of solution depends on ∆, and in particular, where ∆ = 0: ∆ = 0 ) 0 = (Tr(A))2 − 4det(A) This is a parabola in the (Tr(A); det(A)) coordinate system, inside the parabola is where ∆ < 0 (complex roots), and outside the parabola is where ∆ > 0. We can then locate the position of our particular trace and determinant using the Poincar´eDiagram and it will tell us what the stability will be. Examples Given the system where x0 = Ax for each matrix A below, classify the origin using the Poincar´eDiagram: 1 −4 1. 4 −7 SOLUTION: Compute the trace, determinant and discriminant: Tr(A) = −6 Det(A) = −7 + 16 = 9 ∆ = 36 − 4 · 9 = 0 Therefore, we have a \degenerate sink" at the origin. 1 2 2. −5 −1 SOLUTION: Compute the trace, determinant and discriminant: Tr(A) = 0 Det(A) = −1 + 10 = 9 ∆ = 02 − 4 · 9 = −36 The origin is a center. 1 3. Given the system x0 = Ax where the matrix A depends on α, describe how the equilibrium solution changes depending on α (use the Poincar´e Diagram): 2 −5 (a) α −2 SOLUTION: The trace is 0, so that puts us on the \det(A)" axis. -

Hk Hk38 21 56 + + + Y Xyx X 8 40
New York City College of Technology [MODULE 5: FACTORING. SOLVE QUADRATIC EQUATIONS BY FACTORING] MAT 1175 PLTL Workshops Name: ___________________________________ Points: ______ 1. The Greatest Common Factor The greatest common factor (GCF) for a polynomial is the largest monomial that divides each term of the polynomial. GCF contains the GCF of the numerical coefficients and each variable raised to the smallest exponent that appear. a. Factor 8x4 4x3 16x2 4x 24 b. Factor 9 ba 43 3 ba 32 6ab 2 2. Factoring by Grouping a. Factor 56 21k 8h 3hk b. Factor 5x2 40x xy 8y 3. Factoring Trinomials with Lead Coefficients of 1 Steps to factoring trinomials with lead coefficient of 1 1. Write the trinomial in descending powers. 2. List the factorizations of the third term of the trinomial. 3. Pick the factorization where the sum of the factors is the coefficient of the middle term. 4. Check by multiplying the binomials. a. Factor x2 8x 12 b. Factor y 2 9y 36 1 Prepared by Profs. Ghezzi, Han, and Liou-Mark Supported by BMI, NSF STEP #0622493, and Perkins New York City College of Technology [MODULE 5: FACTORING. SOLVE QUADRATIC EQUATIONS BY FACTORING] MAT 1175 PLTL Workshops c. Factor a2 7ab 8b2 d. Factor x2 9xy 18y 2 e. Factor x3214 x 45 x f. Factor 2xx2 24 90 4. Factoring Trinomials with Lead Coefficients other than 1 Method: Trial-and-error 1. Multiply the resultant binomials. 2. Check the sum of the inner and the outer terms is the original middle term bx . a. Factor 2h2 5h 12 b. -

Effective Noether Irreducibility Forms and Applications*
Appears in Journal of Computer and System Sciences, 50/2 pp. 274{295 (1995). Effective Noether Irreducibility Forms and Applications* Erich Kaltofen Department of Computer Science, Rensselaer Polytechnic Institute Troy, New York 12180-3590; Inter-Net: [email protected] Abstract. Using recent absolute irreducibility testing algorithms, we derive new irreducibility forms. These are integer polynomials in variables which are the generic coefficients of a multivariate polynomial of a given degree. A (multivariate) polynomial over a specific field is said to be absolutely irreducible if it is irreducible over the algebraic closure of its coefficient field. A specific polynomial of a certain degree is absolutely irreducible, if and only if all the corresponding irreducibility forms vanish when evaluated at the coefficients of the specific polynomial. Our forms have much smaller degrees and coefficients than the forms derived originally by Emmy Noether. We can also apply our estimates to derive more effective versions of irreducibility theorems by Ostrowski and Deuring, and of the Hilbert irreducibility theorem. We also give an effective estimate on the diameter of the neighborhood of an absolutely irreducible polynomial with respect to the coefficient space in which absolute irreducibility is preserved. Furthermore, we can apply the effective estimates to derive several factorization results in parallel computational complexity theory: we show how to compute arbitrary high precision approximations of the complex factors of a multivariate integral polynomial, and how to count the number of absolutely irreducible factors of a multivariate polynomial with coefficients in a rational function field, both in the complexity class . The factorization results also extend to the case where the coefficient field is a function field. -

Polynomials and Quadratics
Higher hsn .uk.net Mathematics UNIT 2 OUTCOME 1 Polynomials and Quadratics Contents Polynomials and Quadratics 64 1 Quadratics 64 2 The Discriminant 66 3 Completing the Square 67 4 Sketching Parabolas 70 5 Determining the Equation of a Parabola 72 6 Solving Quadratic Inequalities 74 7 Intersections of Lines and Parabolas 76 8 Polynomials 77 9 Synthetic Division 78 10 Finding Unknown Coefficients 82 11 Finding Intersections of Curves 84 12 Determining the Equation of a Curve 86 13 Approximating Roots 88 HSN22100 This document was produced specially for the HSN.uk.net website, and we require that any copies or derivative works attribute the work to Higher Still Notes. For more details about the copyright on these notes, please see http://creativecommons.org/licenses/by-nc-sa/2.5/scotland/ Higher Mathematics Unit 2 – Polynomials and Quadratics OUTCOME 1 Polynomials and Quadratics 1 Quadratics A quadratic has the form ax2 + bx + c where a, b, and c are any real numbers, provided a ≠ 0 . You should already be familiar with the following. The graph of a quadratic is called a parabola . There are two possible shapes: concave up (if a > 0 ) concave down (if a < 0 ) This has a minimum This has a maximum turning point turning point To find the roots (i.e. solutions) of the quadratic equation ax2 + bx + c = 0, we can use: factorisation; completing the square (see Section 3); −b ± b2 − 4 ac the quadratic formula: x = (this is not given in the exam). 2a EXAMPLES 1. Find the roots of x2 −2 x − 3 = 0 . -
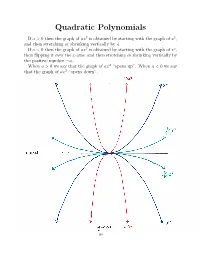
Quadratic Polynomials
Quadratic Polynomials If a>0thenthegraphofax2 is obtained by starting with the graph of x2, and then stretching or shrinking vertically by a. If a<0thenthegraphofax2 is obtained by starting with the graph of x2, then flipping it over the x-axis, and then stretching or shrinking vertically by the positive number a. When a>0wesaythatthegraphof− ax2 “opens up”. When a<0wesay that the graph of ax2 “opens down”. I Cit i-a x-ax~S ~12 *************‘s-aXiS —10.? 148 2 If a, c, d and a = 0, then the graph of a(x + c) 2 + d is obtained by If a, c, d R and a = 0, then the graph of a(x + c)2 + d is obtained by 2 R 6 2 shiftingIf a, c, the d ⇥ graphR and ofaax=⇤ 2 0,horizontally then the graph by c, and of a vertically(x + c) + byd dis. obtained (Remember by shiftingshifting the the⇥ graph graph of of axax⇤ 2 horizontallyhorizontally by by cc,, and and vertically vertically by by dd.. (Remember (Remember thatthatd>d>0meansmovingup,0meansmovingup,d<d<0meansmovingdown,0meansmovingdown,c>c>0meansmoving0meansmoving thatleft,andd>c<0meansmovingup,0meansmovingd<right0meansmovingdown,.) c>0meansmoving leftleft,and,andc<c<0meansmoving0meansmovingrightright.).) 2 If a =0,thegraphofafunctionf(x)=a(x + c) 2+ d is called a parabola. If a =0,thegraphofafunctionf(x)=a(x + c)2 + d is called a parabola. 6 2 TheIf a point=0,thegraphofafunction⇤ ( c, d) 2 is called thefvertex(x)=aof(x the+ c parabola.) + d is called a parabola. The point⇤ ( c, d) R2 is called the vertex of the parabola. -

Fast Computation of Generic Bivariate Resultants∗
Fast computation of generic bivariate resultants∗ JORIS VAN DER HOEVENa, GRÉGOIRE LECERFb CNRS, École polytechnique, Institut Polytechnique de Paris Laboratoire d'informatique de l'École polytechnique (LIX, UMR 7161) 1, rue Honoré d'Estienne d'Orves Bâtiment Alan Turing, CS35003 91120 Palaiseau, France a. Email: [email protected] b. Email: [email protected] Preliminary version of May 21, 2020 We prove that the resultant of two “sufficiently generic” bivariate polynomials over a finite field can be computed in quasi-linear expected time, using a randomized algo- rithm of Las Vegas type. A similar complexity bound is proved for the computation of the lexicographical Gröbner basis for the ideal generated by the two polynomials. KEYWORDS: complexity, algorithm, computer algebra, resultant, elimination, multi- point evaluation 1. INTRODUCTION The efficient computation of resultants is a fundamental problem in elimination theory and for the algebraic resolution of systems of polynomial equations. Given an effective field 핂, it is well known [10, chapter 11] that the resultant of two univariate polynomials P,Q∈핂[x] of respective degrees d⩾e can be computed using O˜ (d) field operations in 핂. Here the soft-Oh notation O˜ (E) is an abbreviation for E(log E)O(1), for any expression E. Given two bivariate polynomials P,Q∈핂[x,y] of respective total degrees d⩾e, their 2 resultant Resy(P, Q) in y can be computed in time O˜ (d e); e.g. see [20, Theorem 25] and references in that paper. If d=e, then this corresponds to a complexity exponent of 3/2 in terms of input/output size. -

The Determinant and the Discriminant
CHAPTER 2 The determinant and the discriminant In this chapter we discuss two indefinite quadratic forms: the determi- nant quadratic form det(a, b, c, d)=ad bc, − and the discriminant disc(a, b, c)=b2 4ac. − We will be interested in the integral representations of a given integer n by either of these, that is the set of solutions of the equations 4 ad bc = n, (a, b, c, d) Z − 2 and 2 3 b ac = n, (a, b, c) Z . − 2 For q either of these forms, we denote by Rq(n) the set of all such represen- tations. Consider the three basic questions of the previous chapter: (1) When is Rq(n) non-empty ? (2) If non-empty, how large Rq(n)is? (3) How is the set Rq(n) distributed as n varies ? In a suitable sense, a good portion of the answers to these question will be similar to the four and three square quadratic forms; but there will be major di↵erences coming from the fact that – det and disc are indefinite quadratic forms (have signature (2, 2) and (2, 1) over the reals), – det and disc admit isotropic vectors: there exist x Q4 (resp. Q3) such that det(x)=0(resp.disc(x) = 0). 2 1. Existence and number of representations by the determinant As the name suggest, determining Rdet(n) is equivalent to determining the integral 2 2 matrices of determinant n: ⇥ (n) ab Rdet(n) M (Z)= g = M2(Z), det(g)=n . ' 2 { cd 2 } ✓ ◆ n 0 Observe that the diagonal matrix a = has determinant n, and any 01 ✓ ◆ other matrix in the orbit SL2(Z).a is integral and has the same determinant. -

Mcissac91.Pdf
Efficient Techniques for Multipolynomial Resultant Algorithms Dinesh Manocha and John Canny Computer Science Division University of California Berkeley, CA 94720 Abstract 1 Introduction Computational methods for manipulating sets of Finding the solution to a system of non-linear poly- polynomial equations are becoming of greater im- nomial equations over a given field is a classical and portance due to the use of polynomial equations in fundamental problem in computational algebra. This various applications. In some cases we need to elim- problem arises in symbolic and numeric techniques inate variables from a given system of polynomial used to manipulate sets of polynomial equations. equations to obtain a ‘(symbolical y smaller” system, Many applications in computer algebra, robotics, while in others we desire to compute the numerical geometric and solid modeling use sets of polyno- solutions of non-linear polynomial equations. Re- mial equations for object representation (as a semi- cently, the techniques of Gr6bner bases and polyno- algebraic set) and for defining constraints (as an al- mial continuation have received much attention as gebraic set). The main operations in these appli- algorithmic methods for these symbolic and numeric cat ions can be classified into two types: simultane- applications. When it comes to practice, these meth- ous elimination of one or more variables from a given ods are slow and not effective for a variety of rea- set of polynomial equations to obtain a “symbolically sons. In this paper we present efficient techniques for smaller” system and computing the numeric solutions applying multipolynomial resultant algorithms and of a system of polynomial equations.