Alternative Input Devices for Steer-By-Wire Systems
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
VIEW Open Access Chassis Coordinated Control for Full X‑By‑Wire Vehicles‑A Review Lei Zhang1,2 , Zhiqiang Zhang1,2, Zhenpo Wang1,2*, Junjun Deng1,2 and David G
Zhang et al. Chin. J. Mech. Eng. (2021) 34:42 https://doi.org/10.1186/s10033-021-00555-6 Chinese Journal of Mechanical Engineering REVIEW Open Access Chassis Coordinated Control for Full X-by-Wire Vehicles-A Review Lei Zhang1,2 , Zhiqiang Zhang1,2, Zhenpo Wang1,2*, Junjun Deng1,2 and David G. Dorrell3 Abstract An X-by-wire chassis can improve the kinematic characteristics of human-vehicle closed-loop system and thus active safety especially under emergency scenarios via enabling chassis coordinated control. This paper aims to provide a complete and systematic survey on chassis coordinated control methods for full X-by-wire vehicles, with the primary goal of summarizing recent reserch advancements and stimulating innovative thoughts. Driving condition identifca- tion including driver’s operation intention, critical vehicle states and road adhesion condition and integrated control of X-by-wire chassis subsystems constitute the main framework of a chassis coordinated control scheme. Under steer- ing and braking maneuvers, diferent driving condition identifcation methods are described in this paper. These are the trigger conditions and the basis for the implementation of chassis coordinated control. For the vehicles equipped with steering-by-wire, braking-by-wire and/or wire-controlled-suspension systems, state-of-the-art chassis coordi- nated control methods are reviewed including the coordination of any two or three chassis subsystems. Finally, the development trends are discussed. Keywords: X-by-wire systems, Chassis coordinated control, -

Vehicle Information SELECTED MODEL
2009 Honda Pilot 4WD 4dr LX (YF4829EW) Prepared By: Florida Department of Management Services, Division of State Purchasing Vehicle Information SELECTED MODEL Code Description YF4829EW 2009 Honda Pilot 4WD 4dr LX SELECTED VEHICLE COLORS SELECTED OPTIONS Code Description ___ STANDARD PAINT All prices and specifications are subject to change without notice. Prices do not include sales tax, vehicle registration fees, finance charges, documentation charges, or other fees required by law. Dealer invoice prices do not include dealer charges, such as advertising charges, that can vary by manufacturer or region. 2009 Honda Pilot 4WD 4dr LX (YF4829EW) Prepared By: Florida Department of Management Services, Division of State Purchasing Standard Equipment MECHANICAL 3.5L SOHC MPFI 24-valve i-VTEC V6 engine Variable Cylinder Management (VCM) Active control engine mount system (ACM) Active Noise Cancellation (ANC) Drive-by-wire throttle 5-speed automatic transmission w/OD Hill start assist Heavy-duty automatic transmission fluid cooler Vehicle Stability Assist (VSA) w/traction control Variable Torque Management (VTM-4) 4-wheel drive system Integrated class III trailer hitch w/trailer harness pre-wiring Unit-body construction MacPherson strut front suspension Multi-link rear suspension w/trailing arms Front & rear stabilizer bars Variable pwr rack & pinion steering Heavy duty pwr steering fluid cooler Pwr ventilated front/solid rear disc brakes 4-wheel anti-lock braking system (ABS) w/electronic brake distribution (EBD) Brake assist EXTERIOR 17" steel -

2019 Textron Off Road Wildcat XX Technical Specifications
2019 WILDCAT™ XX MODELS SPECIFICATIONS SUBJECT TO CHANGE WITHOUT NOTICE 2019 TEXTRON OFF ROAD TECHNICAL SPECIFICATIONS © 2019 Textron Specialized Vehicles 2019 WILDCAT™ XX 2019 WILDCAT™ XX LTD • [NEW MODEL FOR 2019] • Rapid Response drive and Rapid Reaction driven • The curved dashboard focuses 60 percent of the KEY FEATURES clutches provide maximum power transfer and viewing surface toward the driver. instant response to varying loads with minimal • Three-cylinder 998cc DOHC naturally aspirated friction and wear. Dual CVT air intake system • Plug-and-Play accessory installation is pre-wired 4-stroke engine with EFI delivers 130-hp ensures maximum drivetrain efficiency and with four key switch-based powered accessory performance, ultra-quick response and maximum durability. connections and four independently fused and durability. switched circuits for fast and easy installation. • Cast-aluminum 15-in. KMC wheels are • The wishbone-style, trailing arm rear suspension custom built just for the Wildcat XX, delivering • Double-sheer mounted steering and suspension delivers race-proven performance throughout its lightweight, ultimate strength and a signature components deliver optimal durability. Large 18 inches of travel, with an 80 percent reduction style. forged-aluminum front steering knuckles with in track width change compared to other designs. large automotive bearings bring desert racing • 30-inch CST Behemoth tires. performance and durability. • Double A-arm front suspension features unequal length A-arms for optimal wheel camber through • Front gear case and rear transaxle are • Removable rear cargo box handles a 300- the full 18-inch range of travel, resulting in specifically designed and built to support the lb. payload and can accept a spare tire up to maximum handling and cornering control. -

Adaptive Brake by Wire from Human Factors to Adaptive Implementation
UNIVERSITY OF TRENTO Doctoral School in Engineering Of Civil And Mechanical Structural Systems Adaptive Brake By Wire From Human Factors to Adaptive Implementation Thesis Tutor Doctoral Candidate Prof. Mauro Da Lio Andrea Spadoni Mechanical and Mechatronic Systems December 2013 - XXV Cycle 1 Adaptive Brake By Wire From Human Factors to Adaptive Implementation 2 Adaptive Brake By Wire From Human Factors to Adaptive Implementation Table of contents TABLE OF CONTENTS .............................................................................................................. 3 LIST OF FIGURES .................................................................................................................... 6 LIST OF TABLES ...................................................................................................................... 8 GENERAL OVERVIEW .............................................................................................................. 9 INTRODUCTION ................................................................................................................... 12 1. BRAKING PROCESS FROM THE HUMAN FACTORS POINT OF VIEW .................................... 15 1.1. THE BRAKING PROCESS AND THE USER -RELATED ASPECTS ......................................................................... 15 1.2. BRAKE ACTUATOR AS USER INTERFACE ................................................................................................. 16 1.3. BRAKE FORCE ACTUATION : GENERAL MOVEMENT -FORCE DESCRIPTION ...................................................... -

The Design of a Controller for the Steer-By-Wire System∗
896 The Design of a Controller for the Steer-by-Wire System∗ Se-Wook OH∗∗, Ho-Chol CHAE∗∗∗, Seok-Chan YUN∗∗ and Chang-Soo HAN∗∗∗∗ Drive-by-Wire (DBW) technologies improve conventional vehicle performance and a Steer-by-Wire (SBW) system is one of the DBW technologies. The control algorithm of the SBW system was designed in this paper. To verify the control algorithm, the SBW system is modeled using the bond graph method. The first aim of the control algorithm is controlling the steering wheel assist motor to make the real vehicle’s steering feel and for a vehicle designer to adjust the steering feel as he finds necessary. Therefore, torque map is designed to determine the steering wheel reactive torque. The second aim is controlling the front wheel assist motor to improve vehicle’s maneuverability and stability by using understeer and oversteer propensity of a vehicle. Furthermore, high performance control algorithm is proposed in this paper and Active Roll Stability Control (ARSC) method is designed as one of the high performance control algorithm. Key Words: Steer-by-Wire, Drive-by-Wire, Torque Map, Steering Feel, Active Roll Stabil- ity Control a vehicle’s weight by reducing the number of necessary 1. Introduction parts which can lead to energy reduction effectiveness. In 1. 1 Research background and purpose addition, the danger of a driver being crushed when there is a front-end collision is eliminated as there is no steering The Steer-by-Wire (SBW) system is one part of the column. Finally, the most valuable merit is that it per- Drive-by-Wire (DBW) system that the automobile indus- try will research in future. -
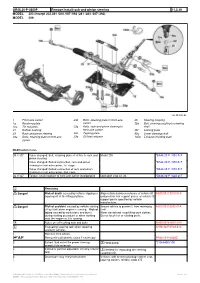
Remove/Install Rack-And-Pinion Steering 11.3.10 MODEL 203 (Except 203.081 /084 /087 /092 /281 /284 /287 /292) MODEL 209
AR46.20-P-0600P Remove/install rack-and-pinion steering 11.3.10 MODEL 203 (except 203.081 /084 /087 /092 /281 /284 /287 /292) MODEL 209 P46.20-2123-09 1 Front axle carrier 23b Bolts, retaining plate to front axle 25 Steering coupling 1g Retaining plate carrier 25a Bolt, steering coupling to steering 10a Tie rod joints 23g Bolts, rack-and-pinion steering to shaft 21 Rubber bushing front axle carrier 25f Locking plate 23 Rack-and-pinion steering 23n Tapping plate 80a Lower steering shaft 23a Bolts, retaining plate to front axle 23q Oil lines retainer 105d Exhaust shielding plate carrier Modification notes 29.11.07 Value changed: Bolt, retaining plate of oil line to rack-and- Model 203 *BA46.20-P-1001-01F pinion steering Value changed: Bolted connection, rack-and-pinion *BA46.20-P-1002-01F steering to front axle carrier, 1st stage Value changed: Bolted connection of rack-and-pinion *BA46.20-P-1002-01F steering to front axle carrier, 2nd stage 30.11.07 Torque, retaining plate to front axle carrier incorporated Operation step 23, 24 *BA46.20-P-1004-01F Removing Danger! Risk of death caused by vehicle slipping or Align vehicle between columns of vehicle lift AS00.00-Z-0010-01A toppling off of the lifting platform. and position four support plates at vehicle lift support points specified by vehicle manufacturer. Danger! Risk of accident caused by vehicle starting Secure vehicle to prevent it from moving by AS00.00-Z-0005-01A off by itself when engine is running. Risk of itself. -

POWER and MANUAL RACK and PINION STEERING Tabla De Diagnostico De Problemas Blies by Removing the Sans Barres D’Accouplement Ni Original a La De Reemplazo
930724-22(R&P) 11/20/03 12:46 PM Page 1 Troubleshooting Chart Tableau de Dépannage - 2. Remove the tie rod assem- Ce type de direction est fourni de las mismas de la unidad 7. Secure the inner tie rod ATTENTION: Ne forcez pas sujetar la cremallera. ’é POWER AND MANUAL RACK AND PINION STEERING Tabla de Diagnostico de Problemas blies by removing the sans barres d’accouplement ni original a la de reemplazo. Se housings. For GM and sur le joint de la crémaillère ni 5. Instale las barras de Step-By-Step Instructions inner tie rod housing. embouts intérieurs ou suministra un juego que con- Chrysler units, stake the sur le pignon. Utilisez toujours acoplamiento en la unidad de DIRECTION À CRÉMAILLÈRE ASSISTÉE OU MANUELLE NOTE: Ford units require extérieurs. Vous devez trans- tiene las partes necesarias housing. For Ford units, une pince pour maintenir la reemplazo, teniendo cuidado de Notice d’installation détaillée férer les barres d’accouple- para garantizar una insta- install the lock pins sup- crémaillère. drilling out a pin or removing instalar la barra de servoir. DIRECCIÓN DE PI—”N Y CREMALLERA MANUAL Y SERVOASISTIDA é ment et les embouts de la laciÛn correcta. plied in the installation kit. rifiez/corrigez la Instrucciones de instalación por pasos a roll pin before the inner tie 5. Installez les barres d’ac- acoplamiento derecha en el é direction d’origine sur la nou- sito. rod can be detached. 1. DespuÈs de quitar la unidad 8. Install the shock dampen- couplement sur la nouvelle lado derecho y la izquierda en ricos (o-rings) o Û velle. -
WH1212 TSP Instructions
Installation Manual Product No. WH1212 2003-2007 LS TRUCK WITH T56 MT STANDALONE WIRING HARNESS, EV6, DRIVE-BY-WIRE WH1212: 2003-2007 LS TRUCK WITH T56 MT STANDALONE WIRING HARNESS, EV6, DRIVE-BY-WIRE This harness is designed to be a complete wiring harness for fuel injection system on GM 2003 and newer Vortec engines with Drive By Wire throttle body and T56 or non- electronic transmissions. 1. Never disconnect the battery or the PCM while the ignition is turned “ON” 2. Never short any wires in the wiring harness to ground (with the exception to the ground wires) this can cause damage to the PCM. 3. A Multi-meter with a minimum of 10-Mohm resistance is required for test circuits. Do not back probe wires, this can lead to permanent wire damage. Requirements: 1. All Vortec engines require VATS to be removed from the PCM. If the system is not removed from the PCM the engine will NOT start. 2. Vortec engine harness utilizes two oxygen sensors on each side of the engine, one before and after the catalytic converter. The rear O2 sensors (after the catalytic converter) are NOT used. 3. All Vortec engines utilize an EGR, Air Pump, and CCP features for emission control, this harness does not include provisions for EGR, Air Pump, and CCP are not necessary for engine operation. PCM programing may be necessary to avoid storing a Diagnostic Trouble Codes (DTC) for the absence of emission equipment 4. It is recommended that you use a VSS when using a T56 or nonelectric transmission (TH350, TH400, Powerglide, 700R4, etc.). -

Electronic Power Steering Rack and Pinion
Remanufactured ELECTRONIC POWER STEERING RACK AND PINION Expertly remanufactured to rigorous quality and performance standards, Product Description CARDONE® Electronic Power Steering Rack and Pinions are equipped with brand-new, premium components to guarantee exceptional longevity and Features and Benefits reliability. Each unit undergoes CARDONE’s Factory Test Drive, simulating Signs of Wear and extreme operating conditions while verifying all on-car communications. Troubleshooting All rubber sealing components are replaced, and a specialized lubricant is applied to drastically increase longevity. FAQs • 100% replacement of rubber sealing components • Application of specialized lubricant(s) for extended life • Finished in protective coating to prevent corrosion and rust • All rack & pinion/gearbox units meet or exceed O.E. form, fit and function. Signs of Wear and Troubleshooting • Knocking or clunking • Vibrations • Power Steering Assist System failure warning on Driver Information Center. • A catch or bind going into or coming out of a turn in either direction. • Intermittent high pitched screeching noise similar to the sound of a motor being actuated. Subscribe to receive email notification whenever cardone.com we introduce new products or technical videos. Tech Service: 888-280-8324 Click Steering Tech Help for technical tips, articles and installation videos. Rev Date:Rev 063015 Date: 021518 • Vehicle has a tendency to wander requiring the driver to make frequent and random and steering wheel corrections to either direction. Product Description • Shimmy; driver observes small or large, consistent, rotational oscillations Features and Benefits of the steering wheel caused by various road surfaces or side-to-side Signs of Wear and (lateral) tire/wheel movements. Troubleshooting • Poor return ability or sticky steering; the poor return of the steering FAQs wheel to center after a turn. -

The Modern Collectible
SKINNED KNUCKLES LARES ARTICLE CORPORATION The Modern Collectible by Orest Lazarowich A DETAILED TECHNICAL COLUMN INTENDED TO TARGET MANY MAKES AND MODELS OF POST-WAR CARS AND PICK-UP TRUCKS the steering wheel is not being turned, power Rack and Pinion steering fluid is directed around the rotary valve and out to the reservoir. The pressure is equal on Power Steering both sides of the piston. As the steering wheel is The rack and pinion power steering differs turned, the torsion bar twists and rotates the rotary slightly from the manual rack and pinion steering. valve. The valve blocks the port to the reservoir, Part of the rack contains a cylinder with a piston and fluid now flows through an opening to one in the middle. The piston is connected to the rack. side of the steering gear. At the same time the There are two fluid ports, one on either side of the other side of the cylinder is vented to the reser- piston. A torsion bar directs the rotary valve voir. With fluid pressure to one side of the piston which is connected to the steering wheel. When and none to the other, the piston moves which in RETURN LINE PUMP RESERVOIR Magazine. STEERING COLUMN ROTARY VALVE PRESSURE LINE TO ROTARY VALVE Skinned Knuckles Skinned FLUID LINES FROM ROTARY VALVE RACK HYDRAULIC PISTON PINION JULY 2014 - PAGE 11 Article content provided by Lares Corporation Steering Components • CALL 1.800.555.0767 • VISIT www.LaresCorp.com SKINNED KNUCKLES LARES ARTICLE CORPORATION turn moves the rack and causes the wheels to turn. -
Wipro Drive-By-Wire Solutions
Wipro Drive-By-Wire Solutions Accelerating Your Autonomous Vehicles Development Journey Wipro’s drive-by-wire system implementation extends from navigation controls to robotics controls, thus making it a comprehensive solution. Introduction Wipro’s drive-by-wire solutions enable electronic control of braking, throttle, steering, and shifting in vehicles. We understand that the intricacies of drive-by-wire solutions differ between prototype and production-grade vehicles. We implement customized and apt drive-by-wire solutions together with our trusted technology partners for any vehicle type. The system implementation extends from navigation controls to robotics controls, thus making it a comprehensive solution. Compliance to safety regulations is ensured in all implementations. Key Takeaways Prototype and one-off vehicles A less invasive approach of installing fully electrically operated servo actuators for functions Production vehicles Replacing existing systems such as power-assisted rack and pinion assembly with EPS and EPAS for steer-by-wire systems Supplementary / Auxiliary control options Direct electronic actuation with solenoid and servo proportional valves for material handling equipment such as hydraulically operated forklifts and cranes All our drive-by-wire designs meet regulatory requirements like ISO26262, ASIL-D, FMVSS and AUTOSAR Key benefits and features of Wipro drive-by-wire systems To provide the appropriate solution to the vehicle type, we place the use case-specific sensors, electronic controllers and central computing platform on top of drive-by-wire enabled system and this is integrated with Wipro’s autonomous navigation AI algorithm software stack. The autonomous navigation stack together with our range of robotic arm movement capabilities, make the end-to-end solution appropriate for any moving machine. -

Mechatronics and Remote Driving Control of the Drive-By-Wire for a Go Kart
sensors Article Mechatronics and Remote Driving Control of the y Drive-by-Wire for a Go Kart Chien-Hsun Wu * , Wei-Chen Lin and Kun-Sheng Wang Department of Vehicle Engineering, National Formosa University, Yunlin 63201, Taiwan; [email protected] (W.-C.L.); [email protected] (K.-S.W.) * Correspondence: [email protected] This paper is an extended version of the paper published in: Wu, C.H.; Lin, W.C.; Lin, Y.Y.; Huang, Y.M. y System Integration of Drive-by-wire for a Go Kart. In Proceedings of the 2019 IEEE Eurasia Conference on IOT, Communication and Engineering, Yunlin, Taiwan, 3–6 October 2019. Received: 31 December 2019; Accepted: 20 February 2020; Published: 23 February 2020 Abstract: This research mainly aims at the construction of the novel acceleration pedal, the brake pedal and the steering system by mechanical designs and mechatronics technologies, an approach of which is rarely seen in Taiwan. Three highlights can be addressed: 1. The original steering parts were removed with the fault tolerance design being implemented so that the basic steering function can still remain in case of the function failure of the control system. 2. A larger steering angle of the front wheels in response to a specific rotated angle of the steering wheel is devised when cornering or parking at low speed in interest of drivability, while a smaller one is designed at high speed in favor of driving stability. 3. The operating patterns of the throttle, brake, and steering wheel can be customized in accordance with various driving environments and drivers’ requirements using the self-developed software.