Chapter 3 Flow Past a Sphere Ii: Stokes' Law, the Bernoulli
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Chapter 4: Immersed Body Flow [Pp
MECH 3492 Fluid Mechanics and Applications Univ. of Manitoba Fall Term, 2017 Chapter 4: Immersed Body Flow [pp. 445-459 (8e), or 374-386 (9e)] Dr. Bing-Chen Wang Dept. of Mechanical Engineering Univ. of Manitoba, Winnipeg, MB, R3T 5V6 When a viscous fluid flow passes a solid body (fully-immersed in the fluid), the body experiences a net force, F, which can be decomposed into two components: a drag force F , which is parallel to the flow direction, and • D a lift force F , which is perpendicular to the flow direction. • L The drag coefficient CD and lift coefficient CL are defined as follows: FD FL CD = 1 2 and CL = 1 2 , (112) 2 ρU A 2 ρU Ap respectively. Here, U is the free-stream velocity, A is the “wetted area” (total surface area in contact with fluid), and Ap is the “planform area” (maximum projected area of an object such as a wing). In the remainder of this section, we focus our attention on the drag forces. As discussed previously, there are two types of drag forces acting on a solid body immersed in a viscous flow: friction drag (also called “viscous drag”), due to the wall friction shear stress exerted on the • surface of a solid body; pressure drag (also called “form drag”), due to the difference in the pressure exerted on the front • and rear surfaces of a solid body. The friction drag and pressure drag on a finite immersed body are defined as FD,vis = τwdA and FD, pres = pdA , (113) ZA ZA Streamwise component respectively. -

Literature Review
SECTION VII GLOSSARY OF TERMS SECTION VII: TABLE OF CONTENTS 7. GLOSSARY OF TERMS..................................................................... VII - 1 7.1 CFD Glossary .......................................................................................... VII - 1 7.2. Particle Tracking Glossary.................................................................... VII - 3 Section VII – Glossary of Terms Page VII - 1 7. GLOSSARY OF TERMS 7.1 CFD Glossary Advection: The process by which a quantity of fluid is transferred from one point to another due to the movement of the fluid. Boundary condition(s): either: A set of conditions that define the physical problem. or: A plane at which a known solution is applied to the governing equations. Boundary layer: A very narrow region next to a solid object in a moving fluid, and containing high gradients in velocity. CFD: Computational Fluid Dynamics. The study of the behavior of fluids using computers to solve the equations that govern fluid flow. Clustering: Increasing the number of grid points in a region to better resolve a geometric or flow feature. Increasing the local grid resolution. Continuum: Having properties that vary continuously with position. The air in a room can be thought of as a continuum because any cube of air will behave much like any other chosen cube of air. Convection: A similar term to Advection but is a more generic description of the Advection process. Convergence: Convergence is achieved when the imbalances in the governing equations fall below an acceptably low level during the solution process. Diffusion: The process by which a quantity spreads from one point to another due to the existence of a gradient in that variable. Diffusion, molecular: The spreading of a quantity due to molecular interactions within the fluid. -

Sensitivity Analysis of Non-Linear Steep Waves Using VOF Method
Tenth International Conference on ICCFD10-268 Computational Fluid Dynamics (ICCFD10), Barcelona, Spain, July 9-13, 2018 Sensitivity Analysis of Non-linear Steep Waves using VOF Method A. Khaware*, V. Gupta*, K. Srikanth *, and P. Sharkey ** Corresponding author: [email protected] * ANSYS Software Pvt Ltd, Pune, India. ** ANSYS UK Ltd, Milton Park, UK Abstract: The analysis and prediction of non-linear waves is a crucial part of ocean hydrodynamics. Sea waves are typically non-linear in nature, and whilst models exist to predict their behavior, limits exist in their applicability. In practice, as the waves become increasingly steeper, they approach a point beyond which the wave integrity cannot be maintained, and they 'break'. Understanding the limits of available models as waves approach these break conditions can significantly help to improve the accuracy of their potential impact in the field. Moreover, inaccurate modeling of wave kinematics can result in erroneous hydrodynamic forces being predicted. This paper investigates the sensitivity of non-linear wave modeling from both an analytical and a numerical perspective. Using a Volume of Fluid (VOF) method, coupled with the Open Channel Flow module in ANSYS Fluent, sensitivity studies are performed for a variety of non-linear wave scenarios with high steepness and high relative height. These scenarios are intended to mimic the near-break conditions of the wave. 5th order solitary wave models are applied to shallow wave scenarios with high relative heights, and 5th order Stokes wave models are applied to short gravity waves with high wave steepness. Stokes waves are further applied in the shallow regime at high wave steepness to examine the wave sensitivity under extreme conditions. -

Chapter 4: Immersed Body Flow [Pp
MECH 3492 Fluid Mechanics and Applications Univ. of Manitoba Fall Term, 2017 Chapter 4: Immersed Body Flow [pp. 445-459 (8e), or 374-386 (9e)] Dr. Bing-Chen Wang Dept. of Mechanical Engineering Univ. of Manitoba, Winnipeg, MB, R3T 5V6 When a viscous fluid flow passes a solid body (fully-immersed in the fluid), the body experiences a net force, F, which can be decomposed into two components: a drag force F , which is parallel to the flow direction, and • D a lift force F , which is perpendicular to the flow direction. • L The drag coefficient CD and lift coefficient CL are defined as follows: FD FL CD = 1 2 and CL = 1 2 , (112) 2 ρU A 2 ρU Ap respectively. Here, U is the free-stream velocity, A is the “wetted area” (total surface area in contact with fluid), and Ap is the “planform area” (maximum projected area of an object such as a wing). In the remainder of this section, we focus our attention on the drag forces. As discussed previously, there are two types of drag forces acting on a solid body immersed in a viscous flow: friction drag (also called “viscous drag”), due to the wall friction shear stress exerted on the • surface of a solid body; pressure drag (also called “form drag”), due to the difference in the pressure exerted on the front • and rear surfaces of a solid body. The friction drag and pressure drag on a finite immersed body are defined as FD,vis = τwdA and FD, pres = pdA , (113) ZA ZA Streamwise component respectively. -

Waves and Structures
WAVES AND STRUCTURES By Dr M C Deo Professor of Civil Engineering Indian Institute of Technology Bombay Powai, Mumbai 400 076 Contact: [email protected]; (+91) 22 2572 2377 (Please refer as follows, if you use any part of this book: Deo M C (2013): Waves and Structures, http://www.civil.iitb.ac.in/~mcdeo/waves.html) (Suggestions to improve/modify contents are welcome) 1 Content Chapter 1: Introduction 4 Chapter 2: Wave Theories 18 Chapter 3: Random Waves 47 Chapter 4: Wave Propagation 80 Chapter 5: Numerical Modeling of Waves 110 Chapter 6: Design Water Depth 115 Chapter 7: Wave Forces on Shore-Based Structures 132 Chapter 8: Wave Force On Small Diameter Members 150 Chapter 9: Maximum Wave Force on the Entire Structure 173 Chapter 10: Wave Forces on Large Diameter Members 187 Chapter 11: Spectral and Statistical Analysis of Wave Forces 209 Chapter 12: Wave Run Up 221 Chapter 13: Pipeline Hydrodynamics 234 Chapter 14: Statics of Floating Bodies 241 Chapter 15: Vibrations 268 Chapter 16: Motions of Freely Floating Bodies 283 Chapter 17: Motion Response of Compliant Structures 315 2 Notations 338 References 342 3 CHAPTER 1 INTRODUCTION 1.1 Introduction The knowledge of magnitude and behavior of ocean waves at site is an essential prerequisite for almost all activities in the ocean including planning, design, construction and operation related to harbor, coastal and structures. The waves of major concern to a harbor engineer are generated by the action of wind. The wind creates a disturbance in the sea which is restored to its calm equilibrium position by the action of gravity and hence resulting waves are called wind generated gravity waves. -
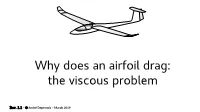
Part III: the Viscous Flow
Why does an airfoil drag: the viscous problem – André Deperrois – March 2019 Rev. 1.1 © Navier-Stokes equations Inviscid fluid Time averaged turbulence CFD « RANS » Reynolds Averaged Euler’s equations Reynolds equations Navier-stokes solvers irrotational flow Viscosity models, uniform 3d Boundary Layer eq. pressure in BL thickness, Prandlt Potential flow mixing length hypothesis. 2d BL equations Time independent, incompressible flow Laplace’s equation 1d BL Integral 2d BL differential equations equations 2d mixed empirical + theoretical 2d, 3d turbulence and transition models 2d viscous results interpolation The inviscid flow around an airfoil Favourable pressure gradient, the flo! a""elerates ro# $ero at the leading edge%s stagnation point& Adverse pressure gradient, the low decelerates way from the surface, the flow free tends asymptotically towards the stream air freestream uniform flow flow inviscid ◀—▶ “laminar”, The boundary layer way from the surface, the fluid’s velocity tends !ue to viscosity, the asymptotically towards the tangential velocity at the velocity field of an ideal inviscid contact of the foil is " free flow around an airfoil$ stream air flow (magnified scale) The boundary layer is defined as the flow between the foil’s surface and the thic%ness where the fluid#s velocity reaches &&' or &&$(' of the inviscid flow’s velocity. The viscous flow around an airfoil at low Reynolds number Favourable pressure gradient, the low a""elerates ro# $ero at the leading edge%s stagnation point& Adverse pressure gradient, the low decelerates +n adverse pressure gradients, the laminar separation bubble forms. The flow goes flow separates. The velocity close to the progressively turbulent inside the bubble$ surface goes negative. -

Moremore Millikan’S Oil-Drop Experiment
MoreMore Millikan’s Oil-Drop Experiment Millikan’s measurement of the charge on the electron is one of the few truly crucial experiments in physics and, at the same time, one whose simple directness serves as a standard against which to compare others. Figure 3-4 shows a sketch of Millikan’s apparatus. With no electric field, the downward force on an oil drop is mg and the upward force is bv. The equation of motion is dv mg Ϫ bv ϭ m 3-10 dt where b is given by Stokes’ law: b ϭ 6a 3-11 and where is the coefficient of viscosity of the fluid (air) and a is the radius of the drop. The terminal velocity of the falling drop vf is Atomizer (+) (–) Light source (–) (+) Telescope Fig. 3-4 Schematic diagram of the Millikan oil-drop apparatus. The drops are sprayed from the atomizer and pick up a static charge, a few falling through the hole in the top plate. Their fall due to gravity and their rise due to the electric field between the capacitor plates can be observed with the telescope. From measurements of the rise and fall times, the electric charge on a drop can be calculated. The charge on a drop could be changed by exposure to x rays from a source (not shown) mounted opposite the light source. (Continued) 12 More mg Buoyant force bv v ϭ 3-12 f b (see Figure 3-5). When an electric field Ᏹ is applied, the upward motion of a charge Droplet e qn is given by dv Weight mg q Ᏹ Ϫ mg Ϫ bv ϭ m n dt Fig. -

Settling Velocities of Particulate Systems†
Settling Velocities of Particulate Systems† F. Concha Department of Metallurgical Engineering University of Concepción.1 Abstract This paper presents a review of the process of sedimentation of individual particles and suspensions of particles. Using the solutions of the Navier-Stokes equation with boundary layer approximation, explicit functions for the drag coefficient and settling velocities of spheres, isometric particles and arbitrary particles are developed. Keywords: sedimentation, particulate systems, fluid dynamics Discrete sedimentation has been successful to 1. Introduction establish constitutive equations in processes using Sedimentation is the settling of a particle, or sus- sedimentation. It establishes the sedimentation prop- pension of particles, in a fluid due to the effect of an erties of a certain particulate material in a given fluid. external force such as gravity, centrifugal force or Nevertheless, to analyze a sedimentation process and any other body force. For many years, workers in to obtain behavioral pattern permitting the prediction the field of Particle Technology have been looking of capacities and equipment design procedures, an- for a simple equation relating the settling velocity of other approach is required, the so-called continuum particles to their size, shape and concentration. Such approach. a simple objective has required a formidable effort The physics underlying sedimentation, that is, the and it has been solved only in part through the work settling of a particle in a fluid is known since a long of Newton (1687) and Stokes (1844) of flow around time. Stokes presented the equation describing the a particle, and the more recent research of Lapple sedimentation of a sphere in 1851 and that can be (1940), Heywood (1962), Brenner (1964), Batchelor considered as the starting point of all discussions of (1967), Zenz (1966), Barnea and Mitzrahi (1973) the sedimentation process. -
Gravity and Projectile Motion
Do Now: What is gravity? Gravity Gravity is a force that acts between any 2 masses. Two factors affect the gravitational attraction between objects: mass and distance. What direction is Gravity? Earth’s gravity acts downward toward the center of the Earth. What is the difference between Mass and Weight? • Mass is a measure of the amount of matter (stuff) in an object. • Weight is a measure of the force of gravity on an object. • Your mass never changes,no matter where you are in the universe. But your weight will vary depending upon the force of gravity pulling down on you. Would you be heavier or lighter on the Moon? Gravity is a Law of Science • Newton realized that gravity acts everywhere in the universe, not just on Earth. • It is the force that makes an apple fall to the ground. • It is the force that keeps the moon orbiting around Earth. • It is the force that keeps all the planets in our solar system orbiting around the sun. What Newton realized is now called the Law of Universal Gravitation • The law of universal gravitation states that the force of gravity acts between all objects in the universe. • This means that any two objects in the universe, without exception, attract each other. • You are attracted not only to Earth but also to all the other objects around you. A cool thing about gravity is that it also acts through objects. Free Fall • When the only force acting on an object is gravity, the object is said to be in free fall. -

Incompressible Irrotational Flow
Incompressible irrotational flow Enrique Ortega [email protected] Rotation of a fluid element As seen in M1_2, the arbitrary motion of a fluid element can be decomposed into • A translation or displacement due to the velocity. • A deformation (due to extensional and shear strains) mainly related to viscous and compressibility effects. • A rotation (of solid body type) measured through the midpoint of the diagonal of the fluid element. The rate of rotation is defined as the angular velocity. The latter is related to the vorticity of the flow through: d 2 V (1) dt Important: for an incompressible, inviscid flow, the momentum equations show that the vorticity for each fluid element remains constant (see pp. 17 of M1_3). Note that w is positive in the 2 – Irrotational flow counterclockwise sense Irrotational and rotational flow ij 0 According to the Prandtl’s boundary layer concept, thedomaininatypical(high-Re) aerodynamic problem at low can be divided into outer and inner flow regions under the following considerations: Extracted from [1]. • In the outer region (away from the body) the flow is considered inviscid and irrotational (viscous contributions vanish in the momentum equations and =0 due to farfield vorticity conservation). • In the inner region the viscous effects are confined to a very thin layer close to the body (vorticity is created at the boundary layer by viscous stresses) and a thin wake extending downstream (vorticity must be convected with the flow). Under these hypotheses, it is assumed that the disturbance of the outer flow, caused by the body and the thin boundary layer around it, is about the same caused by the body alone. -

Terminal Velocity and Projectiles Acceleration Due to Gravity
Terminal Velocity and Projectiles To know what terminal velocity is and how it occurs To know how the vertical and horizontal motion of a projectile are connected Acceleration Due To Gravity An object that falls freely will accelerate towards the Earth because of the force of gravity acting on it. The size of this acceleration does not depend mass, so a feather and a bowling ball accelerate at the same rate. On the Moon they hit the ground at the same time, on Earth the resistance of the air slows the feather more than the bowling ball. The size of the gravitational field affects the magnitude of the acceleration. Near the surface of the Earth the gravitational field strength is 9.81 N/kg. This is also the acceleration a free falling object would have on Earth. In the equations of motion a = g = 9.81 m/s. Mass is a property that tells us how much matter it is made of. Mass is measured in kilograms, kg Weight is a force caused by gravity acting on a mass: weight = mass x gravitational field strength w mg Weight is measured in Newtons, N Terminal Velocity If an object is pushed out of a plane it will accelerate towards the ground because of its weight (due to the Earth’s gravity). Its velocity will increase as it falls but as it does, so does the drag forces acting on the object (air resistance). Eventually the air resistance will balance the weight of the object. This means there will be no overall force which means there will be no acceleration. -

Geosc 548 Notes R. Dibiase 9/2/2016
Geosc 548 Notes R. DiBiase 9/2/2016 1. Fluid properties and concept of continuum • Fluid: a substance that deforms continuously under an applied shear stress (e.g., air, water, upper mantle...) • Not practical/possible to treat fluid mechanics at the molecular level! • Instead, need to define a representative elementary volume (REV) to average quantities like velocity, density, temperature, etc. within a continuum • Continuum: smoothly varying and continuously distributed body of matter – no holes or discontinuities 1.1 What sets the scale of analysis? • Too small: bad averaging • Too big: smooth over relevant scales of variability… An obvious length scale L for ideal gases is the mean free path (average distance traveled by before hitting another molecule): = ( 1 ) 2 2 where kb is the Boltzman constant, πr is the effective4√2 cross sectional area of a molecule, T is temperature, and P is pressure. Geosc 548 Notes R. DiBiase 9/2/2016 Mean free path of atmosphere Sea level L ~ 0.1 μm z = 50 km L ~ 0.1 mm z = 150 km L ~ 1 m For liquids, not as straightforward to estimate L, but typically much smaller than for gas. 1.2 Consequences of continuum approach Consider a fluid particle in a flow with a gradient in the velocity field : �⃑ For real fluids, some “slow” molecules get caught in faster flow, and some “fast” molecules get caught in slower flow. This cannot be reconciled in continuum approach, so must be modeled. This is the origin of fluid shear stress and molecular viscosity. For gases, we can estimate viscosity from first principles using ideal gas law, calculating rate of momentum exchange directly.