Flexible Computing with Virtual Machines
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

THINC: a Virtual and Remote Display Architecture for Desktop Computing and Mobile Devices
THINC: A Virtual and Remote Display Architecture for Desktop Computing and Mobile Devices Ricardo A. Baratto Submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy in the Graduate School of Arts and Sciences COLUMBIA UNIVERSITY 2011 c 2011 Ricardo A. Baratto This work may be used in accordance with Creative Commons, Attribution-NonCommercial-NoDerivs License. For more information about that license, see http://creativecommons.org/licenses/by-nc-nd/3.0/. For other uses, please contact the author. ABSTRACT THINC: A Virtual and Remote Display Architecture for Desktop Computing and Mobile Devices Ricardo A. Baratto THINC is a new virtual and remote display architecture for desktop computing. It has been designed to address the limitations and performance shortcomings of existing remote display technology, and to provide a building block around which novel desktop architectures can be built. THINC is architected around the notion of a virtual display device driver, a software-only component that behaves like a traditional device driver, but instead of managing specific hardware, enables desktop input and output to be intercepted, manipulated, and redirected at will. On top of this architecture, THINC introduces a simple, low-level, device-independent representation of display changes, and a number of novel optimizations and techniques to perform efficient interception and redirection of display output. This dissertation presents the design and implementation of THINC. It also intro- duces a number of novel systems which build upon THINC's architecture to provide new and improved desktop computing services. The contributions of this dissertation are as follows: • A high performance remote display system for LAN and WAN environments. -

Virtualgl / Turbovnc Survey Results Version 1, 3/17/2008 -- the Virtualgl Project
VirtualGL / TurboVNC Survey Results Version 1, 3/17/2008 -- The VirtualGL Project This report and all associated illustrations are licensed under the Creative Commons Attribution 3.0 License. Any works which contain material derived from this document must cite The VirtualGL Project as the source of the material and list the current URL for the VirtualGL web site. Between December, 2007 and March, 2008, a survey of the VirtualGL community was conducted to ascertain which features and platforms were of interest to current and future users of VirtualGL and TurboVNC. The larger purpose of this survey was to steer the future development of VirtualGL and TurboVNC based on user input. 1 Statistics 49 users responded to the survey, with 32 complete responses. When listing percentage breakdowns for each response to a question, this report computes the percentages relative to the total number of complete responses for that question. 2 Responses 2.1 Server Platform “Please select the server platform(s) that you currently use or plan to use with VirtualGL/TurboVNC” Platform Number of Respondees (%) Linux/x86 25 / 46 (54%) ● Enterprise Linux 3 (x86) 2 / 46 (4.3%) ● Enterprise Linux 4 (x86) 5 / 46 (11%) ● Enterprise Linux 5 (x86) 6 / 46 (13%) ● Fedora Core 4 (x86) 1 / 46 (2.2%) ● Fedora Core 7 (x86) 1 / 46 (2.2%) ● Fedora Core 8 (x86) 4 / 46 (8.7%) ● SuSE Linux Enterprise 9 (x86) 1 / 46 (2.2%) 1 Platform Number of Respondees (%) ● SuSE Linux Enterprise 10 (x86) 2 / 46 (4.3%) ● Ubuntu (x86) 7 / 46 (15%) ● Debian (x86) 5 / 46 (11%) ● Gentoo (x86) 1 / -

Ati Driver Freebsd
Ati driver freebsd Hey, I`m new to teh the bsd *BSD world and just installed Freebsd FreeBSD. Only thing missing is my video driver. ATI Radeon X How to Solved - Switch between ATI and VESA drivers? If you want to automatically load a video driver at boot time, we recommend to do it from /etc/:Radeon: It allows the use of newer xfvideo-ati drivers and AMD GPUs. This project started in January Initial radeon code comes from Linux. EndSection DESCRIPTION radeon is an Xorg driver for ATI/AMD RADEON-based video cards with the following features: o Full support for 8-, , and. This package contains the xfvideo-ati driver. xdrivers/drm-kmod: Port for the DRM kernel drivers for FreeBSD This port. If I boot X11 with no or with ati driver, the system stops responding, although cursor continues to follow mouse movements. (I suppose. To all those concerned, I have read that FreeBSD would be supported by the latest graphic card drivers, which was also confirmed by. I bought an expensive ATI card when they announced they'll go Note that AMD doesn't provide a driver for FreeBSD, so you'll be using the. We now know for sure that FreeBSD will ship with a kernel mode-setting driver for supporting open-source AMD Radeon graphics with its. AMD tech support has allegedly confirmed that Catalyst is being ported to FreeBSD. A Phoronix reader pointed out this thread. I am not sure that FreeBSD will fully support this card. The Xorg version for FreeBSD is and the ATI driver used is version The reason is, AMD/ATI doesn't support FreeBSD, and you have to resort to the sucky open source drivers. -

Supporting Distributed Visualization Services for High Performance Science and Engineering Applications – a Service Provider Perspective
9th IEEE/ACM International Symposium on Cluster Computing and the Grid Supporting distributed visualization services for high performance science and engineering applications – A service provider perspective Lakshmi Sastry*, Ronald Fowler, Srikanth Nagella and Jonathan Churchill e-Science Centre, Science & Technology Facilities Council, Introduction activities, the outcomes, the status and some suggestions as to the way forward. The Science & Technology Facilities Council is home to international Facilities such as the ISIS Workshops and tutorials Neutron Spallation Source, Central Laser Facility and Diamond Light Source, the National The take up of advanced visualization Grid Service including national super techniques within STFC scientists and their computers, Tier1 data service for CERN particle colleagues from the wider academia is quite physics experiment, the British Atmospheric limited despite decades of holding seminars and data Centre and the British Oceanographic Data surgeries to create awareness of the state of the Centre at the Space Science and Technology art. Visualization events generally tend to department. Together these Facilities generate attract practitioners in the field and an several Terabytes of data per month which needs occasional application domain expert. This is a to be handled, catalogued and provided access serious issue limiting the more widespread use to. In addition, the scientists within STFC of advanced visualization tools. In order to departments also develop complex simulations address this deficit, more recently, we have and undertake data analysis for their own begun an escalation of such events by holding experiments. Facilities also have strong ongoing show and tell “Other Peoples Business” to collaborations with UK academic and introduce exemplars from specific domains and commercial users through their involvement then the tools behind the exemplars, advertising with Collaborative Computational Programme, these events exclusively to scientists of various generating very large simulation datasets. -

The Linux Graphics Stack Attributions
I - Hardware : Anatomy of a GPU II - Host : The Linux graphics stack Attributions Introduction to GPUs and to the Linux Graphics Stack Martin Peres CC By-SA 3.0 Nouveau developer Ph.D. student at LaBRI November 26, 2012 1 / 36 I - Hardware : Anatomy of a GPU II - Host : The Linux graphics stack Attributions General overview Outline 1 I - Hardware : Anatomy of a GPU General overview Driving screens Host < − > GPU communication 2 II - Host : The Linux graphics stack General overview DRM and libdrm Mesa X11 Wayland X11 vs Wayland 3 Attributions Attributions 2 / 36 I - Hardware : Anatomy of a GPU II - Host : The Linux graphics stack Attributions General overview General overview of a modern GPU's functions Display content on a screen Accelerate 2D operations Accelerate 3D operations Decode videos Accelerate scientific calculations 3 / 36 I - Hardware : Anatomy of a GPU II - Host : The Linux graphics stack Attributions General overview CPU Clock Front-side Graphics Generator bus card slot Chipset Memory Slots High-speed graphics bus (AGP or PCI Northbridge Memory Express) bus (memory controller hub) Internal Bus PCI Bus Onboard Southbridge graphics PCI (I/O controller controller Bus hub) IDE SATA USB Cables and Ethernet ports leading Audio Codec CMOS Memory off-board PCI Slots LPC Bus Super I/O Serial Port Parallel Port Flash ROM Floppy Disk Keyboard (BIOS) Mouse 4 / 36 I - Hardware : Anatomy of a GPU II - Host : The Linux graphics stack Attributions General overview Hardware architecture GPU: Where all the calculations are made VRAM: Stores -

Release 0.11 Todd Gamblin
Spack Documentation Release 0.11 Todd Gamblin Feb 07, 2018 Basics 1 Feature Overview 3 1.1 Simple package installation.......................................3 1.2 Custom versions & configurations....................................3 1.3 Customize dependencies.........................................4 1.4 Non-destructive installs.........................................4 1.5 Packages can peacefully coexist.....................................4 1.6 Creating packages is easy........................................4 2 Getting Started 7 2.1 Prerequisites...............................................7 2.2 Installation................................................7 2.3 Compiler configuration..........................................9 2.4 Vendor-Specific Compiler Configuration................................ 13 2.5 System Packages............................................. 16 2.6 Utilities Configuration.......................................... 18 2.7 GPG Signing............................................... 20 2.8 Spack on Cray.............................................. 21 3 Basic Usage 25 3.1 Listing available packages........................................ 25 3.2 Installing and uninstalling........................................ 42 3.3 Seeing installed packages........................................ 44 3.4 Specs & dependencies.......................................... 46 3.5 Virtual dependencies........................................... 50 3.6 Extensions & Python support...................................... 53 3.7 Filesystem requirements........................................ -

Intel Embedded Graphics Drivers, EFI Video Driver, and Video BIOS V10.4
Intel® Embedded Graphics Drivers, EFI Video Driver, and Video BIOS v10.4 User’s Guide April 2011 Document Number: 274041-032US INFORMATION IN THIS DOCUMENT IS PROVIDED IN CONNECTION WITH INTEL PRODUCTS. NO LICENSE, EXPRESS OR IMPLIED, BY ESTOPPEL OR OTHERWISE, TO ANY INTELLECTUAL PROPERTY RIGHTS IS GRANTED BY THIS DOCUMENT. EXCEPT AS PROVIDED IN INTEL'S TERMS AND CONDITIONS OF SALE FOR SUCH PRODUCTS, INTEL ASSUMES NO LIABILITY WHATSOEVER AND INTEL DISCLAIMS ANY EXPRESS OR IMPLIED WARRANTY, RELATING TO SALE AND/OR USE OF INTEL PRODUCTS INCLUDING LIABILITY OR WARRANTIES RELATING TO FITNESS FOR A PARTICULAR PURPOSE, MERCHANTABILITY, OR INFRINGEMENT OF ANY PATENT, COPYRIGHT OR OTHER INTELLECTUAL PROPERTY RIGHT. UNLESS OTHERWISE AGREED IN WRITING BY INTEL, THE INTEL PRODUCTS ARE NOT DESIGNED NOR INTENDED FOR ANY APPLICATION IN WHICH THE FAILURE OF THE INTEL PRODUCT COULD CREATE A SITUATION WHERE PERSONAL INJURY OR DEATH MAY OCCUR. Intel may make changes to specifications and product descriptions at any time, without notice. Designers must not rely on the absence or characteristics of any features or instructions marked “reserved” or “undefined.” Intel reserves these for future definition and shall have no responsibility whatsoever for conflicts or incompatibilities arising from future changes to them. The information here is subject to change without notice. Do not finalize a design with this information. The products described in this document may contain design defects or errors known as errata which may cause the product to deviate from published specifications. Current characterized errata are available on request. Contact your local Intel sales office or your distributor to obtain the latest specifications and before placing your product order. -
Vsim User Guide Release 10.1.0-R2780
VSim User Guide Release 10.1.0-r2780 Tech-X Corporation Mar 12, 2020 2 CONTENTS 1 Overview 1 1.1 What is VSimComposer?........................................1 1.2 VSim Capabilities............................................1 2 Starting VSimComposer 3 2.1 Running Locally.............................................3 2.2 Running VSimComposer On a Remote Computer System.......................4 2.3 Visualizing Remote Data.........................................5 2.4 Welcome Window............................................5 3 Creating or Opening a Simulation7 3.1 Starting a Simulation...........................................7 4 Menus and Menu Items 15 4.1 File Menu................................................. 15 4.2 Edit Menu................................................ 18 4.3 View Menu................................................ 21 4.4 Help Menu................................................ 21 4.5 Tools/VSimComposer Menu (Settings/Preferences)........................... 21 5 Simulation Concepts 31 5.1 Simulation Concepts Introduction.................................... 31 5.2 Grids................................................... 32 5.3 Geometries................................................ 36 5.4 Electric and Magnetic Fields....................................... 36 5.5 Particles................................................. 41 5.6 Reactions................................................. 43 5.7 Histories................................................. 44 6 Visual Setup 45 6.1 Setup Window for Visual-setup Simulations.............................. -
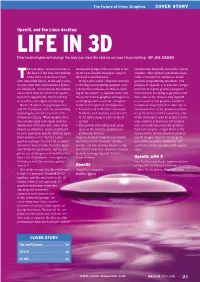
Opengl and the Linux Desktop LIFE in 3D New Technologies Will Change the Way You View the Objects on Your Linux Desktop
The Future of Linux Graphics COVER STORY OpenGL and the Linux desktop LIFE IN 3D New technologies will change the way you view the objects on your Linux desktop. BY JOE CASAD he X graphics system has been at antiquated design of the X system is not, specification originally created by Silicon the heart of the Unix GUI desktop on its own, flexible enough to support Graphics. The OpenGL specification pro- Tsince 1984. Of course, its hori- this kind of performance. vides a standard for vendors to create zons expanded slowly. In the early years, In the Linux world, wherever you find graphics programming interfaces. The no one knew they even needed a graph- a very big and intriguing question, you purpose of OpenGL is to provide a single ics subsystem, and if anyone did venture can bet that someone out there is work- interface that gives graphics programs a out to try X with one of the few applica- ing on the answer. A solution to the wor- standard way of talking to graphics hard- tions that supported it, they needed to ries of the restless graphics developers is ware. One of the reasons why OpenGL be ready for late nights of tinkering. converging now around the emergence is necessary is that graphics hardware But the X system kept getting better, of two very important developments: vendors are busy with their own experi- and the X protocol, with its surrounding • Extensions to X that offer increased ments to deliver richer graphics and bet- technologies, served a key role in the flexibility and shortcuts around some ter performance to their customers. -
HOW to VISUALIZE YOUR GPU-ACCELERATED SIMULATION RESULTS Peter Messmer, NVIDIA
HOW TO VISUALIZE YOUR GPU-ACCELERATED SIMULATION RESULTS Peter Messmer, NVIDIA RANGE OF ANALYSIS AND VIZ TASKS . Analysis: Focus quantitative . Visualization: Focus qualitative . Monitoring, Steering TRADITIONAL HPC WORKFLOW Workstation Analysis, Setup Visualization Supercomputer Viz Cluster Dump, Checkpointing Visualization, Analysis File System TRADITIONAL WORKFLOW: CHALLENGES Lack of interactivity prevents “intuition” Workstation High-end viz Analysis, neglected due Setup Visualization to workflow complexity Supercomputer Viz Cluster Viz resources need I/O becomes main to scale with simulation Dump, simulation bottleneck Checkpointing Visualization, Analysis File System OUTLINE . Visualization applications . CUDA/OpenGL interop . Remote viz . Parallel viz . In-Situ viz High-level overview. Some parts platform dependent. Check with your sysadmin. VISUALIZATION APPLICATIONS NON-REPRESENTATIVE VIZ TOOLS SURVEY OF 25 HPC SITES Surveyed sites: LLNL LLNL- ORNL- AFRL- NASA- NERSC -OCF SCF LANL CCS DOD-ORC DSCR AFRL ARL ERDC NAVY MHPCC ORS CCAC NAS NASA-NCCS TACC CHPC RZG HLRN Julich CSCS CSC Hector Curie NON-REPRESENTATIVE VIZ TOOLS SURVEY OF 25 HPC SITES Surveyed sites: LLNL LLNL- ORNL- AFRL- NASA- NERSC -OCF SCF LANL CCS DOD-ORC DSCR AFRL ARL ERDC NAVY MHPCC ORS CCAC NAS NASA-NCCS TACC CHPC RZG HLRN Julich CSCS CSC Hector Curie VISIT . Scalar, vector and tensor field data features — Plots: contour, curve, mesh, pseudo-color, volume,.. — Operators: slice, iso-surface, threshold, binning,.. Quantitative and qualitative analysis/vis — Derived fields, dimension reduction, line-outs — Pick & query . Scalable architecture . Open source http://wci.llnl.gov/codes/visit/ VISIT . Cross-platform — Linux/Unix, OSX, Windows . Wide range of data formats — .vtk, .netcdf, .hdf5,.. Extensible — Plugin architecture . Embeddable . Python scriptable VISIT’S SCALABLE ARCHITECTURE . -

Package Name Software Description Project
A S T 1 Package Name Software Description Project URL 2 Autoconf An extensible package of M4 macros that produce shell scripts to automatically configure software source code packages https://www.gnu.org/software/autoconf/ 3 Automake www.gnu.org/software/automake 4 Libtool www.gnu.org/software/libtool 5 bamtools BamTools: a C++ API for reading/writing BAM files. https://github.com/pezmaster31/bamtools 6 Biopython (Python module) Biopython is a set of freely available tools for biological computation written in Python by an international team of developers www.biopython.org/ 7 blas The BLAS (Basic Linear Algebra Subprograms) are routines that provide standard building blocks for performing basic vector and matrix operations. http://www.netlib.org/blas/ 8 boost Boost provides free peer-reviewed portable C++ source libraries. http://www.boost.org 9 CMake Cross-platform, open-source build system. CMake is a family of tools designed to build, test and package software http://www.cmake.org/ 10 Cython (Python module) The Cython compiler for writing C extensions for the Python language https://www.python.org/ 11 Doxygen http://www.doxygen.org/ FFmpeg is the leading multimedia framework, able to decode, encode, transcode, mux, demux, stream, filter and play pretty much anything that humans and machines have created. It supports the most obscure ancient formats up to the cutting edge. No matter if they were designed by some standards 12 ffmpeg committee, the community or a corporation. https://www.ffmpeg.org FFTW is a C subroutine library for computing the discrete Fourier transform (DFT) in one or more dimensions, of arbitrary input size, and of both real and 13 fftw complex data (as well as of even/odd data, i.e. -

Upgrading and Performance Analysis of Thin Clients in Server Based Scientific Computing
Institutionen för Systemteknik Department of Electrical Engineering Examensarbete Upgrading and Performance Analysis of Thin Clients in Server Based Scientific Computing Master Thesis in ISY Communication System By Rizwan Azhar LiTH-ISY-EX - - 11/4388 - - SE Linköping 2011 Department of Electrical Engineering Linköpings Tekniska Högskola Linköpings universitet Linköpings universitet SE-581 83 Linköping, Sweden 581 83 Linköping, Sweden Upgrading and Performance Analysis of Thin Clients in Server Based Scientific Computing Master Thesis in ISY Communication System at Linköping Institute of Technology By Rizwan Azhar LiTH-ISY-EX - - 11/4388 - - SE Examiner: Dr. Lasse Alfredsson Advisor: Dr. Alexandr Malusek Supervisor: Dr. Peter Lundberg Presentation Date Department and Division 04-02-2011 Department of Electrical Engineering Publishing Date (Electronic version) Language Type of Publication ISBN (Licentiate thesis) X English Licentiate thesis ISRN: Other (specify below) X Degree thesis LiTH-ISY-EX - - 11/4388 - - SE Thesis C-level Thesis D-level Title of series (Licentiate thesis) 55 Report Number of Pages Other (specify below) Series number/ISSN (Licentiate thesis) URL, Electronic Version http://www.ep.liu.se Publication Title Upgrading and Performance Analysis of Thin Clients in Server Based Scientific Computing Author Rizwan Azhar Abstract Server Based Computing (SBC) technology allows applications to be deployed, managed, supported and executed on the server and not on the client; only the screen information is transmitted between the server and client. This architecture solves many fundamental problems with application deployment, technical support, data storage, hardware and software upgrades. This thesis is targeted at upgrading and evaluating performance of thin clients in scientific Server Based Computing (SBC). Performance of Linux based SBC was assessed via methods of both quantitative and qualitative research.