Initializing the WRF Model with Tropical Cyclone Real-Time Reports Using the Ensemble
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Typhoon Neoguri Disaster Risk Reduction Situation Report1 DRR Sitrep 2014‐001 ‐ Updated July 8, 2014, 10:00 CET
Typhoon Neoguri Disaster Risk Reduction Situation Report1 DRR sitrep 2014‐001 ‐ updated July 8, 2014, 10:00 CET Summary Report Ongoing typhoon situation The storm had lost strength early Tuesday July 8, going from the equivalent of a Category 5 hurricane to a Category 3 on the Saffir‐Simpson Hurricane Wind Scale, which means devastating damage is expected to occur, with major damage to well‐built framed homes, snapped or uprooted trees and power outages. It is approaching Okinawa, Japan, and is moving northwest towards South Korea and the Philippines, bringing strong winds, flooding rainfall and inundating storm surge. Typhoon Neoguri is a once‐in‐a‐decade storm and Japanese authorities have extended their highest storm alert to Okinawa's main island. The Global Assessment Report (GAR) 2013 ranked Japan as first among countries in the world for both annual and maximum potential losses due to cyclones. It is calculated that Japan loses on average up to $45.9 Billion due to cyclonic winds every year and that it can lose a probable maximum loss of $547 Billion.2 What are the most devastating cyclones to hit Okinawa in recent memory? There have been 12 damaging cyclones to hit Okinawa since 1945. Sustaining winds of 81.6 knots (151 kph), Typhoon “Winnie” caused damages of $5.8 million in August 1997. Typhoon "Bart", which hit Okinawa in October 1999 caused damages of $5.7 million. It sustained winds of 126 knots (233 kph). The most damaging cyclone to hit Japan was Super Typhoon Nida (reaching a peak intensity of 260 kph), which struck Japan in 2004 killing 287 affecting 329,556 people injuring 1,483, and causing damages amounting to $15 Billion. -

Chapter 7. Building a Safe and Comfortable Society
Section 1 Realizing a Universal Society Building a Safe and Comfortable Chapter 7 Society Section 1 Realizing a Universal Society 1 Realizing Accessibility through a Universal Design Concept The “Act on Promotion of Smooth Transportation, etc. of Elderly Persons, Disabled Persons, etc.” embodies the universal design concept of “freedom and convenience for anywhere and anyone”, making it mandatory to comply with “Accessibility Standards” when newly establishing various facilities (passenger facilities, various vehicles, roads, off- street parking facilities, city parks, buildings, etc.), mandatory best effort for existing facilities as well as defining a development target for the end of FY2020 under the “Basic Policy on Accessibility” to promote accessibility. Also, in accordance with the local accessibility plan created by municipalities, focused and integrated promotion of accessibility is carried out in priority development district; to increase “caring for accessibility”, by deepening the national public’s understanding and seek cooperation for the promotion of accessibility, “accessibility workshops” are hosted in which you learn to assist as well as virtually experience being elderly, disabled, etc.; these efforts serve to accelerate II accessibility measures (sustained development in stages). Chapter 7 (1) Accessibility of Public Transportation In accordance with the “Act on Figure II-7-1-1 Current Accessibility of Public Transportation Promotion of Smooth Transportation, etc. (as of March 31, 2014) of Elderly Persons, Disabled -

Wang, M., M. Xue, and K. Zhao (2016), September 2008
PUBLICATIONS Journal of Geophysical Research: Atmospheres RESEARCH ARTICLE The impact of T-TREC-retrieved wind and radial 10.1002/2015JD024001 velocity data assimilation using EnKF Key Points: and effects of assimilation window • T-TREC-retrieved wind and radial velocity data are assimilated using an on the analysis and prediction ensemble Kalman filter • The relative impacts of two data sets of Typhoon Jangmi (2008) on analysis and prediction changes with assimilation windows Mingjun Wang1,2, Ming Xue1,2,3, and Kun Zhao1 • The combination of retrieved wind and radial velocity produces better 1Key Laboratory for Mesoscale Severe Weather/MOE and School of Atmospheric Science, Nanjing University, Nanjing, analyses and forecasts China, 2Center for Analysis and Prediction of Storms, Norman, Oklahoma, USA, 3School of Meteorology, University of Oklahoma, Norman, Oklahoma, USA Correspondence to: M. Xue, Abstract This study examines the relative impact of assimilating T-TREC-retrieved winds (VTREC)versusradial [email protected] velocity (Vr) on the analysis and forecast of Typhoon Jangmi (2008) using an ensemble Kalman filter (EnKF). The VTREC and Vr data at 30 min intervals are assimilated into the ARPS model at 3 km grid spacing over four different Citation: assimilation windows that cover, respectively, 0000–0200, 0200–0400, 0400–0600, and 0000–0600 UTC, 28 Wang, M., M. Xue, and K. Zhao (2016), September 2008. The assimilation of VTREC data produces better analyses of the typhoon structure and intensity The impact of T-TREC-retrieved wind and radial velocity data assimilation than the assimilation of Vr data during the earlier assimilation windows, but during the later assimilation using EnKF and effects of assimilation windows when the coverage of Vr data on the typhoon from four Doppler radars is much improved, the window on the analysis and prediction assimilation of V outperforms V data. -

The Influence of Assimilating Dropsonde Data on Typhoon Track
908 MONTHLY WEATHER REVIEW VOLUME 139 The Influence of Assimilating Dropsonde Data on Typhoon Track and Midlatitude Forecasts MARTIN WEISSMANN,* FLORIAN HARNISCH,* CHUN-CHIEH WU,1 PO-HSIUNG LIN,1 YOICHIRO OHTA,# KOJI YAMASHITA,# YEON-HEE KIM,@ EUN-HEE JEON,@ TETSUO NAKAZAWA,& AND SIM ABERSON** * Deutsches Zentrum fu¨r Luft- und Raumfahrt, Institut fu¨r Physik der Atmospha¨re, Oberpfaffenhofen, Germany 1 Department of Atmospheric Sciences, National Taiwan University, Taipei, Taiwan # Japan Meteorological Agency, Tokyo, Japan @ National Institute of Meteorological Research, Korea Meteorological Agency, Seoul, South Korea & Meteorological Research Institute, Tsukuba, Japan ** NOAA/AOML/Hurricane Research Division, Miami, Florida (Manuscript received 9 February 2010, in final form 21 April 2010) ABSTRACT A unique dataset of targeted dropsonde observations was collected during The Observing System Re- search and Predictability Experiment (THORPEX) Pacific Asian Regional Campaign (T-PARC) in the autumn of 2008. The campaign was supplemented by an enhancement of the operational Dropsonde Ob- servations for Typhoon Surveillance near the Taiwan Region (DOTSTAR) program. For the first time, up to four different aircraft were available for typhoon observations and over 1500 additional soundings were collected. This study investigates the influence of assimilating additional observations during the two major typhoon events of T-PARC on the typhoon track forecast by the global models of the European Centre for Medium- Range Weather Forecasts (ECMWF), the Japan Meteorological Agency (JMA), the National Centers for Environmental Prediction (NCEP), and the limited-area Weather Research and Forecasting (WRF) model. Additionally, the influence of T-PARC observations on ECMWF midlatitude forecasts is investigated. All models show an improving tendency of typhoon track forecasts, but the degree of improvement varied from about 20% to 40% in NCEP and WRF to a comparably low influence in ECMWF and JMA. -

Science Discussion Started: 22 October 2018 C Author(S) 2018
Discussions Earth Syst. Sci. Data Discuss., https://doi.org/10.5194/essd-2018-127 Earth System Manuscript under review for journal Earth Syst. Sci. Data Science Discussion started: 22 October 2018 c Author(s) 2018. CC BY 4.0 License. Open Access Open Data 1 Field Investigations of Coastal Sea Surface Temperature Drop 2 after Typhoon Passages 3 Dong-Jiing Doong [1]* Jen-Ping Peng [2] Alexander V. Babanin [3] 4 [1] Department of Hydraulic and Ocean Engineering, National Cheng Kung University, Tainan, 5 Taiwan 6 [2] Leibniz Institute for Baltic Sea Research Warnemuende (IOW), Rostock, Germany 7 [3] Department of Infrastructure Engineering, Melbourne School of Engineering, University of 8 Melbourne, Australia 9 ---- 10 *Corresponding author: 11 Dong-Jiing Doong 12 Email: [email protected] 13 Tel: +886 6 2757575 ext 63253 14 Add: 1, University Rd., Tainan 70101, Taiwan 15 Department of Hydraulic and Ocean Engineering, National Cheng Kung University 16 -1 Discussions Earth Syst. Sci. Data Discuss., https://doi.org/10.5194/essd-2018-127 Earth System Manuscript under review for journal Earth Syst. Sci. Data Science Discussion started: 22 October 2018 c Author(s) 2018. CC BY 4.0 License. Open Access Open Data 1 Abstract 2 Sea surface temperature (SST) variability affects marine ecosystems, fisheries, ocean primary 3 productivity, and human activities and is the primary influence on typhoon intensity. SST drops 4 of a few degrees in the open ocean after typhoon passages have been widely documented; 5 however, few studies have focused on coastal SST variability. The purpose of this study is to 6 determine typhoon-induced SST drops in the near-coastal area (within 1 km of the coast) and 7 understand the possible mechanism. -

An Incoherent Subseasonal Pattern of Tropical Convective and Zonal Wind
An incoherent subseasonal pattern of tropical convective and zonal wind anomalies contributed to weak signals on both the Wheeler-Hendon (RMM) and CPC MJO indices during the past week. The spatial pattern of upper-level velocity potential anomalies exhibited influences from higher frequency modes, such as tropical cyclone activity over the eastern Pacific and anomalous divergence over Africa. During the past several days, however, these conflicting signals have weakened. Additionally, constructive interference of a strong equatorial Rossby Wave (ERW) and a Kelvin Wave over the eastern Indian Ocean and Maritime Continent contributed to an ongoing large area of enhanced convection. The RMM Index has responded to this evolution and is currently projecting a signal in Phase-4. Dynamical model MJO index forecasts are consistent with a rapid propagation of this signal eastward over the Maritime Continent during the upcoming week, likely due to influence from the Kelvin Wave. Beyond this period, however, the GFS weakens the MJO signal while the CFS, UKMET, and ECMWF models continue a slower eastward propagation over the western Pacific. There is uncertainty whether the enhanced convection over the Maritime Continent associated with the interactions between a more transient Kelvin Wave and the ERW will evolve into a more robust subseasonal signal on the MJO time scale. Due to the consensus among numerous dynamical models, however, impacts of MJO propagation from the Maritime Continent to the West Pacific were considered for this outlook. Tropical cyclones developed over both the eastern and western Pacific basins during the past week. Super Typhoon Neoguri, the third typhoon of 2014 and the first major cyclone, developed east of the Philippines on 3 July. -

A Vortex Relocation Scheme for Tropical Cyclone Initialization in Advanced Research WRF
3298 MONTHLY WEATHER REVIEW VOLUME 138 A Vortex Relocation Scheme for Tropical Cyclone Initialization in Advanced Research WRF LING-FENG HSIAO Central Weather Bureau, and Taiwan Typhoon and Flood Research Institute, Taipei, Taiwan CHI-SANN LIOU Naval Research Laboratory, Monterey, California TIEN-CHIANG YEH Central Weather Bureau, Taipei, Taiwan YONG-RUN GUO National Center for Atmospheric Research, Boulder, Colorado DER-SONG CHEN,KANG-NING HUANG,CHUEN-TEYR TERNG, AND JEN-HER CHEN Central Weather Bureau, Taipei, Taiwan (Manuscript received 6 November 2009, in final form 23 February 2010) ABSTRACT This paper introduces a relocation scheme for tropical cyclone (TC) initialization in the Advanced Research Weather Research and Forecasting (ARW-WRF) model and demonstrates its application to 70 forecasts of Ty- phoons Sinlaku (2008), Jangmi (2008), and Linfa (2009) for which Taiwan’s Central Weather Bureau (CWB) issued typhoon warnings. An efficient and dynamically consistent TC vortex relocation scheme for the WRF terrain- following mass coordinate has been developed to improve the first guess of the TC analysis, and hence improves the tropical cyclone initialization. The vortex relocation scheme separates the first-guess atmospheric flow into a TC circulation and environmental flow, relocates the TC circulation to its observed location, and adds the relocated TC circulation back to the environmental flow to obtain the updated first guess with a correct TC position. Analysis of these typhoon cases indicates that the relocation procedure moves the typhoon circulation to the observed typhoon position without generating discontinuities or sharp gradients in the first guess. Numerical experiments with and without the vortex relocation procedure for Typhoons Sinlaku, Jangmi, and Linfa forecasts show that about 67% of the first-guess fields need a vortex relocation to correct typhoon position errors while eliminates the topographical effect. -
Report on UN ESCAP / WMO Typhoon Committee Members Disaster Management System
Report on UN ESCAP / WMO Typhoon Committee Members Disaster Management System UNITED NATIONS Economic and Social Commission for Asia and the Pacific January 2009 Disaster Management ˆ ` 2009.1.29 4:39 PM ˘ ` 1 ¿ ‚fiˆ •´ lp125 1200DPI 133LPI Report on UN ESCAP/WMO Typhoon Committee Members Disaster Management System By National Institute for Disaster Prevention (NIDP) January 2009, 154 pages Author : Dr. Waonho Yi Dr. Tae Sung Cheong Mr. Kyeonghyeok Jin Ms. Genevieve C. Miller Disaster Management ˆ ` 2009.1.29 4:39 PM ˘ ` 2 ¿ ‚fiˆ •´ lp125 1200DPI 133LPI WMO/TD-No. 1476 World Meteorological Organization, 2009 ISBN 978-89-90564-89-4 93530 The right of publication in print, electronic and any other form and in any language is reserved by WMO. Short extracts from WMO publications may be reproduced without authorization, provided that the complete source is clearly indicated. Editorial correspon- dence and requests to publish, reproduce or translate this publication in part or in whole should be addressed to: Chairperson, Publications Board World Meteorological Organization (WMO) 7 bis, avenue de la Paix Tel.: +41 (0) 22 730 84 03 P.O. Box No. 2300 Fax: +41 (0) 22 730 80 40 CH-1211 Geneva 2, Switzerland E-mail: [email protected] NOTE The designations employed in WMO publications and the presentation of material in this publication do not imply the expression of any opinion whatsoever on the part of the Secretariat of WMO concerning the legal status of any country, territory, city or area, or of its authorities, or concerning the delimitation of its frontiers or boundaries. -

Phase Concept for Mudflow Based on the Influence of Viscosity
Soils and Foundations 2013;53(1):77–90 The Japanese Geotechnical Society Soils and Foundations www.sciencedirect.com journal homepage: www.elsevier.com/locate/sandf Phase concept for mudflow based on the influence of viscosity Shannon Hsien-Heng Leen, Budijanto Widjaja1 National Taiwan University of Science and Technology, Department of Construction Engineering, No. 43 Keelung Road, Section 4, Taipei 106, Taiwan Received 22 November 2011; received in revised form 4 July 2012; accepted 1 September 2012 Available online 26 January 2013 Abstract The phase concept implies that the state of soil changes from plastic to viscous liquid as a function of water content. This principle could be used to interpret the behavior of mudflows, the most dangerous mass movements today. When Typhoon Jangmi hit northern Taiwan in 2008, a mudflow occurred in the Maokong area as a result of the high-intensity rainfall. This case was studied using three simulations, each with a different water content. Based on the mudflow classifications, the primary criteria used in this study were flow velocity and solid concentration by volume, while the major rheology parameters directly obtained from our new laboratory device, the flow box test, were yield stress and viscosity. The results show that the mass movement confirmed the aforementioned criteria for mudflow when the water content reaches or exceeds the liquid limit. The flow box test can determine the viscosity for both plastic and viscous liquid states, which is advantageous. Viscosity is important for explaining the general characteristics of mudflow movement because it controls flow velocity. Therefore, the present study successfully elucidates the changes in mudflow from its initiation to its transportation and deposition via a numerical simulation using laboratory rheology parameters. -
October 2013 Global Catastrophe Recap 2 2
October 2013 Global Catastrophe Recap Table of Contents Executive0B Summary 3 United2B States 4 Remainder of North America (Canada, Mexico, Caribbean, Bermuda) 4 South4B America 4 Europe 4 6BAfrica 5 Asia 5 Oceania8B (Australia, New Zealand and the South Pacific Islands) 6 8BAAppendix 7 Contact Information 14 Impact Forecasting | October 2013 Global Catastrophe Recap 2 2 Executive0B Summary . Windstorm Christian affects western and northern Europe; insured losses expected to top USD1.35 billion . Cyclone Phailin and Typhoon Fitow highlight busy month of tropical cyclone activity in Asia . Deadly bushfires destroy hundreds of homes in Australia’s New South Wales Windstorm Christian moved across western and northern Europe, bringing hurricane-force wind gusts and torrential rains to several countries. At least 18 people were killed and dozens more were injured. The heaviest damage was sustained in the United Kingdom, France, Belgium, the Netherlands and Scandinavia, where a peak wind gust of 195 kph (120 mph) was recorded in Denmark. More than 1.2 million power outages were recorded and travel was severely disrupted throughout the continent. Reports from European insurers suggest that payouts are likely to breach EUR1.0 billion (USD1.35 billion). Total economic losses will be even higher. Christian becomes the costliest European windstorm since WS Xynthia in 2010. Cyclone Phailin became the strongest system to make landfall in India since 1999, coming ashore in the eastern state of Odisha. At least 46 people were killed. Tremendous rains, an estimated 3.5-meter (11.0-foot) storm surge, and powerful winds led to catastrophic damage to more than 430,000 homes and 668,000 hectares (1.65 million) acres of cropland. -

3Rd Quarter 2014
Climate Impacts and Hawaii and U.S. Pacific Islands Region Outlook 3rd Quarter 2014 nd Significant Events and Impacts for 2 Quarter 2014 The region is still under an El Niño Watch. Periods of heavy rain fell in Hawaii, raising streams and Above normal rainfall flooding lowlands. fell over much of Guam, Palau, the Federated States of Micronesia, and the Marshall Islands. Guam was affected by three tropical storms and Sea-levels continued to record rains in July. fall across Guam, the Federated States of Micronesia, and the Republic of the Marshall Islands – supportive of the ongoing transition to El Niño state. Heavy rains fell in late July in American Samoa. Shading indicates each Island’s Exclusive Economic Zone (EEZ). nd Regional Climate Overview for 2 Quarter 2014 Sea-Surface Temperature Anomaly Map, valid July July 2014 precipitation anomaly. Source: Sea-Surface Height Anomaly, valid Aug 1, 30, 2014 . Source: http://www.cpc.ncep.noaa.gov http://iridl.ldeo.columbia.edu/ 2014. Source: http://cpc.ncep.noaa.gov/ The region remains under an El Niño Watch and weather conditions were more in-line with El Niño during the quarter (e.g., increasing sea-surface th temperatures, falling sea level, and wet conditions across Micronesia). However, as of August 4 , the Niño 3.4 region anomaly was -0.1°C, which corresponds to ENSO neutral conditions. Sea-surface temperatures were generally near normal, with the warmest anomalies exceeding 1°C near CNMI. The monthly mean sea level in the 2nd quarter continued to show falling levels in most of the USAPI stations; however, Guam, Pago Pago, and Honolulu remain slightly above normal. -
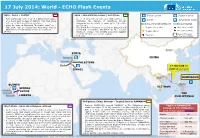
World - ECHO Flash Events
17 July 2014: World - ECHO Flash Events Gaza - Israel – Conflict Syria – Humanitarian access / assistance Tropical cyclone Disease outbreak Legend • Both parties agreed to respect a humanitarian pause • As of 16 July, UN agencies and NGO partners are Conflict Humanitarian access of 5 hours after 9 days of fighting. This must allow organizing the delivery of assistance through Cyclones Track points safe access for humanitarian assistance. designated border points to reach up to 2.9 million WIND_SPEEDTROPICAL CYCLONE INTENSITY TROPICAL CYCLONE • Since the start of Operation “Protective Edge” on 7 more people. July 2014, over 200 Palestinians have been killed in • The World Food Program is putting in place the UN Ï Tropical0.000000 Depression - 17.000000 Observed position Gaza and more than thousand have been injured. monitoring mechanism mandated in the relevant Tropical Storm Forecast position (ECHO) resolution. UNICEF has already positioned supplies Ï 17.000001 - 32.500000 ready for the first cross-border convoys. Area of Forecast Typhoon (ECHO, UN) Track Uncertainty Ï 32.500001 - 69.000000 Ï 69.000001 - 100.000000 SYRIA CHINA PALESTINE Gaza 17 July 6.00 UTC ISRAEL 138km/h sust. winds RAMMASUN GUINEA VIETNAM SIERRA LEONE THE LIBERIA PHILIPPINES Philippines, China, Vietnam – Tropical Cyclone RAMMASUN West Africa – Ebola Virus Disease outbreak • Typhoon RAMMASUN (named “GLENDA” in The Philippines) made Typhoon RAMMASUN landfall overnight 15-16 July (local time) in Albay and Quezon. On 17 Damage in The Philippines • As the number of Ebola cases and deaths in Guinea and, in particular, July, 6.00 UTC, its centre was located over the South China Sea, as of 17 July; source: NDRRMC Sierra Leone and Liberia continues to mount (964 cases and 603 approx.