Microphonesmicrophones Methodsmethods Ofof Operationoperation Andand Typetype Examplesexamples Microphones for Studio and Home-Recording Applications
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
A GUIDE to USING FETS for SENSOR APPLICATIONS by Ron Quan
Three Decades of Quality Through Innovation A GUIDE TO USING FETS FOR SENSOR APPLICATIONS By Ron Quan Linear Integrated Systems • 4042 Clipper Court • Fremont, CA 94538 • Tel: 510 490-9160 • Fax: 510 353-0261 • Email: [email protected] A GUIDE TO USING FETS FOR SENSOR APPLICATIONS many discrete FETs have input capacitances of less than 5 pF. Also, there are few low noise FET input op amps Linear Systems that have equivalent input noise voltages density of less provides a variety of FETs (Field Effect Transistors) than 4 nV/ 퐻푧. However, there are a number of suitable for use in low noise amplifier applications for discrete FETs rated at ≤ 2 nV/ 퐻푧 in terms of equivalent photo diodes, accelerometers, transducers, and other Input noise voltage density. types of sensors. For those op amps that are rated as low noise, normally In particular, low noise JFETs exhibit low input gate the input stages use bipolar transistors that generate currents that are desirable when working with high much greater noise currents at the input terminals than impedance devices at the input or with high value FETs. These noise currents flowing into high impedances feedback resistors (e.g., ≥1MΩ). Operational amplifiers form added (random) noise voltages that are often (op amps) with bipolar transistor input stages have much greater than the equivalent input noise. much higher input noise currents than FETs. One advantage of using discrete FETs is that an op amp In general, many op amps have a combination of higher that is not rated as low noise in terms of input current noise and input capacitance when compared to some can be converted into an amplifier with low input discrete FETs. -
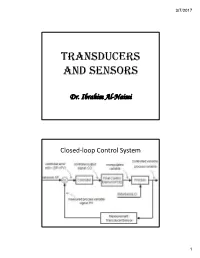
Transducers and Sensors
3/7/2017 TRANSDUCERS AND SENSORS Dr. Ibrahim Al-Naimi Closed‐loop Control System 1 3/7/2017 CHAPTER ONE Introduction Functional Elements of a Measurement System • Basic Functional Elements 1‐Transducer Element 2‐ Signal Conditioning Element 3‐ Data Presentation Element • Auxiliary Functional Elements A‐ Calibration Element B‐ External Power supply 2 3/7/2017 Functional Elements of a Measurement System Transducer and Signal Conditioning 3 3/7/2017 Transducer Element • The Transducer is defined as a device, which when actuated by one form of energy, is capable of converting it to another form of energy. The transduction may be from mechanical, electrical, or optical to any other related form. • The term transducer is used to describe any item which changes information from one form to another. Transducer Element • The Transducer element normally senses the desired input in one physical form and convert it to an output in another physical form. For example, the input variable to the transducer could be pressure, acceleration, or temperature and the output of transducer may be disp lacemen t, voltage, or resitistance change depending on the type of transducer element. 4 3/7/2017 Transducer Element • Single stage • Double stage Single Stage Transducer 5 3/7/2017 Double Stage Transducer Typical Examples of Transducer Elements 6 3/7/2017 Typical Examples of Transducer Elements Typical Examples of Transducer Elements 7 3/7/2017 Transducers classification • Based on power type classification ‐ Active transducer (Diaphragms, Bourdon Tubes, tachometers, piezoelectric, etc…) ‐ Passive transducer (Capacitive, inductive, photo, LVDT, etc…) Transducers classification • Based on the type of output signal ‐ Analogue Transducers (stain gauges, LVDT, etc…) ‐ Digital Transducers (Absolute and incremental encoders) 8 3/7/2017 Transducers classification • Based on the electrical phenomenon or parameter tha t may be chdhanged due to the whole process. -

AEA-KU5A-Owners-Manual-Rev1.Pdf
AEA KU5A OWNER’S MANUAL ACTIVE CARDIOID END-ADDRESS RIBBON MIC WELCOME We congratulate you on your purchase of the AEA KU5A ribbon microphone and welcome you to the AEA family. Never before has a ribbon mic delivered such directionality and uncompromised tonality in a package so fit for both studio and live settings. The KU5A is ideal for studio and live applications where both superior rejection and classic ribbon tonality are paramount. Whether recording a vocal, guitar, or even a snare drum, the KU5A delivers brilliant, focused sound where other conventional ribbons can’t. From close range the KU5A retains the hefty low end and pronounced midrange one expects of AEA ribbons and with manageable proximity effect. Vocalists can sing directly into the grille of the KU5A because its interior components are the most protected of any in the AEA lineup. The rugged KU5A is equipped with active electronics, so it’s suited or any preamp in the studio and on the road. Your KU5A microphone is 100% handcrafted in Pasadena, CA. AEA is an independent, family owned company with a small crew of skilled technicians – many of whom are themselves, musicians. We manufacture all our ribbon microphones and preamps with locally sourced parts. We hope your microphone will capture many magical performances that touch the heart. This manual will help ensure that you get the best sound and longevity from your new microphone. Please become part of the AEA community by sharing your experiences via e-mail, phone or social media. Wes Dooley President of AEA 2 CONTENTS 2 WELCOME 4 INTRODUCTION 4 SUPPORT 5 GENERAL GUIDELINES 7 APPLICATION ADVICE 10 SPECIFICATIONS 3 INTRODUCTION The KU5A is an end-address, phantom-powered, supercardioid ribbon microphone. -
Transducers in Audio ● Transducer: Any Mechanism That Transforms One Form of Energy Into Another Form of Energy
Transducers in Audio ● Transducer: Any mechanism that transforms one form of energy into another form of energy. ○ Physical energy into mechanical energy ○ Physical energy into electrical energy ○ Mechanical energy into electrical energy ○ Vice versa Audio is primarily concerned with turning physical acoustic energy into electrical energy and back again. What are our two most basic audio transducers? scienceaid.net https://socratic.org/questions/what-part-of-the-ear-contains-the-sensory-receptors-for-hearing From Acoustic to Electric Energy First...a short trip into basic electrical theory... Michael Faraday http://www.rigb.org/our-history/michael-faraday Electro-magnetism Faraday’s Law of Induction: Basically, any change in the magnetic field of a coil of wire will cause a voltage to be induced in a wire. Conversely, any change in the voltage on a coil of wire will cause the magnetic field to change. This is called electromagnetism, and the field created is called an electro-magnetic field. Capacitance When two conductors are given an opposite charge, an electric or more specifically a capacitive field is generated around them. When the relationship between the two conductors (for example the distance between them) changes it causes measurable effects on the charges. http://hyperphysics.phy-astr.gsu.edu/hbase/electric/imgele/cap.png Capacitance When two conductors are given an opposite charge, a electric or more specifically a capacitive field is generated around them. When the relationship between the two conductors, for example the distance between them, changes is causes measurable effects on the charges. http://hyperphysics.phy-astr.gsu.edu/hbase/electric/imgele/cap.png ● Alternating Current (AC) vs Direct Current (DC) ○ AC charge changes from positive to negative across the zero axis. -

Bachelor Thesis
BACHELOR THESIS Relationship Between Distance and Microphone Directivity in a Speaker Booth Björn Samuelsson 2015 Bachelor of Arts Audio Engineering Luleå University of Technology Department of Arts, Communication and Education Relationship between distance and microphone directivity in a speaker booth Abstract A study was made to investigate trained listeners preferences regarding a microphone's directivity and distance from a speaker when listening to a voice recorded in a speaker booth. Two directivities (omnidirectional and cardioid) and three distances (5, 25 and 52 cm) were tested on 19 subjects in a multiple comparison listening test regarding their preference and five other attributes taken from earlier studies. The result showed that an omnidirectional microphone placed close to a source might be preferable over a cardioid at the same distance or a cardioid placed a bit away from the source. The omnidirectional microphone however tends to perform more even at different distances compared to a cardioid, which makes it easier for a engineer to find a good microphone position for it. Table of Content Acknowledgements..........................................................................................................3 1. Introduction.....................................................................................................................4 1.1. Aim............................................................................................................................4 1.2. Research question....................................................................................................4 -
Proximity Effect Detection for Directional Microphones
Audio Engineering Society Convention Paper 8475 Presented at the 131st Convention 2011 October 20–23 New York, USA This Convention paper was selected based on a submitted abstract and 750-word precis that have been peer reviewed by at least two qualified anonymous reviewers. The complete manuscript was not peer reviewed. This convention paper has been reproduced from the author’s advance manuscript without editing, corrections, or consideration by the Review Board. The AES takes no responsibility for the contents. Additional papers may be obtained by sending request and remittance to Audio Engineering Society, 60 East 42nd Street, New York, New York 10165-2520, USA; also see www.aes.org. All rights reserved. Reproduction of this paper, or any portion thereof, is not permitted without direct permission from the Journal of the Audio Engineering Society. Proximity effect detection for directional microphones Alice Clifford1 and Joshua D. Reiss1 1Queen Mary University of London, London, E1 4NS, UK Correspondence should be addressed to Alice Clifford ([email protected]) ABSTRACT The proximity effect in directional microphones is characterised by an undesired boost in low frequency energy as the source to microphone distance decreases. Traditional methods for reducing the proximity effect use a high pass filter to cut low frequencies which alter the tonal characteristics of the sound and are not dependent on the input source. This paper proposes an intelligent approach to detect the proximity effect in a single capsule directional microphone in real time. The low frequency boost is detected by analysing the spectral flux of the signal over a number of bands over time. -

Basic Physics of Ultrasonographic Imaging
BASIC PHYSICS OF ULTlVlSONOGRAPHIC IMAGING Diagnostic Imaging and Laboratory Technology Essential Health Technologies Health Technology and Pharmaceuticals WORLD HEALTH ORGANIZATION Geneva BASIC PHYSICS OF ULTRASONOGRAPHIC IMAGING Editor Harald Ostensen Author Nimrod M. Tole, Ph.D. Associate Professor of Medical Physics Department of Diagnostic Radiology University of Nairobi WORLD HEALTH ORGANIZATION WHO Library Cataloguing-in-Publication Data Tole, Nimrod M. Basic physics of ultrasonic imaging / by Nimrod M. Tole. 1. Ultrasonography I. Title. ISBN 92 41592990 (NLM classification: WN 208) © World Health Organization 2005 All rights reserved. Publications of the World Health Organization can be obtained from WHO Press, World Health Organization, 20 Avenue Appia, 1211 Geneva 27, Switzerland (tel: +41 22 791 2476; fax: +41 22791 4857; email: [email protected]). Requests for permission to reproduce or translate WHO publications - whether for sale or for noncommercial distribution - should be addressed to WHO Press, at the above address (fax: +41 22791 4806; email: [email protected]). The designations employed and the presentation of the material in this publication do not imply the expression of any opinion whatsoever on the part of the World Health Organization concerning the legal status of any country, territory, city or area or of its authorities, or concerning the delimitation of its frontiers or boundaries. Dotted lines on maps represent approximate border lines for which there may not yet be full agreement. The mention of specific companies or of certain manufacturers' products does not imply that they are endorsed or recommended by the World Health Organization in preference to others of a similar nature that are not mentioned. -

Chapter 1 Introduction to Measurement Systems
4/3/2019 Advanced Measurement Systems and Sensors Dr. Ibrahim Al-Naimi Chapter one Introduction to Measurement Systems 1 4/3/2019 Outlines • Control and measurement systems • Transducer/sensor definition and classifications • Signal conditioning definition and classifications • Units of measurements • Types of errors • Transducer/sensor transfer function • Transducer characteristics • Statistical analysis Closed-loop Control System 2 4/3/2019 Measurement System Transducer and Signal Conditioning 3 4/3/2019 Transducer Element • The Transducer is defined as a device, which when actuated by one form of energy, is capable of converting it to another form of energy. The transduction may be from mechanical, electrical, or optical to any other related form. • The term transducer is used to describe any item which changes information from one form to another. Transducer and Sensor • Transducers are elements that respond to changes in the physical condition of a system and deliver output signals related to the measured, but of a different form and nature. • Sensor is the initial stage in any transducer. • The property of transducer element is affected by the variation of the external physical variable according to unique relationship. 4 4/3/2019 Transducers classification • Based on power type classification - Active transducer (Diaphragms, Bourdon Tubes, tachometers, piezoelectric, etc…) - Passive transducer (Capacitive, inductive, photo, LVDT, etc…) Transducers classification • Based on the type of output signal - Analogue Transducers (stain -

Maximizing Efficiency in Active Loudspeaker Systems
Maximizing Efficiency in Active Loudspeaker Systems Wolfgang Klippel, KLIPPEL GmbH, Dresden, Germany Increasing the efficiency of the electro-acoustical conversion is the key to modern audio devices generating the required sound output with minimum size, weight, cost and energy. There is unused potential for increasing the efficiency of the electro-dynamical transducer by using a nonlinear motor topology, a soft suspension and cultivating the modal resonances in the mechanical and acoustical system. However, transducers optimized for maximum efficiency are more prone to nonlinear and unstable behavior. Nonlinear adaptive control can compensate for the undesired signal distortion, protect the transducer against overload, stabilize the voice coil position and cope with time varying properties of the suspension. The paper discusses the design of modern active systems that combine the new opportunities provided by software algorithms with the optimization of the hardware components in the transducer and power amplifier. reducing power consumption in portable 1 Introduction applications with limited battery capacity. The user of loudspeakers, headphone and other For this discussion, the paper provides new audio devices expects that the audio signal can be definitions of the efficiency to consider the influence reproduced at sufficient amplitude and quality but of the spectral properties of the complex audio prefers products which are smaller, lighter, less cost signals (e.g. music). The paper explains the intensive and provide a longer stand-alone operation difference between efficiency and voltage in personal applications. sensitivity, which is a second important Creating such an audio product requires a characteristic of the transducer required to match the combination of hardware and software components transducer with the power amplifier. -

Practical Recommendations for Using Sound Transducers
ICaD 2013 6–10 july, 2013, Łódź, Poland international Conference on auditory Display The 19th International Conference on Auditory Display (ICAD-2013) July 6-10, 2013, Lodz, Poland The 19th International Conference on Auditory Display (ICAD-2013) July 6-10, 2013, Lodz, Poland The 19thPRACTICAL International Conference on Auditory RECOMMENDATIONS Display (ICAD-2013) FORJu USINGly 6-10, 2013, Lodz, Poland PRACTICAL RECOMMENDATIONS FOR USING SOUND TRANSDUCERS WITH GLASS SOUNDMEMBERANE TRANSDUCERS AS AUDITORY DISPLAY WITH BASED GLASS ON MEASUREMENTS MEMBERANE AND SIMULATIONSPRACTICAL RECOMMENDATIONS FOR USING SOUND TRANSDUCERS WITH GLASS ASPRACTICAL AUDITORY RECOMMENDATIONS DISPLAY FOR BASED USINGMEMBERANE SOUND ON TRANSDUCERS MEASUREMENTS AS AUDITORY WITH DISPLAY GLASS BASED ON MEASUREMENTS AND MEMBERANE AS AUDITORY DISPLAY BASED ON MEASUREMENTSSIMULATIONS AND György WersényANDi SIMULATIONS József Répás György Wersényi József Répás SzéchenyiGyörgyGyörgy István WersényiWersény Universityi , SzéchenyiJózsefJózsef IstvánRépás Répás University, DepartmentSzéchenyi of István Telecommunications University, , DepartmentSzéchenyi of Telecommunications, István University, Department of Telecommunications, SzéchenyiDepartment István University of Telecommunications,, Széchenyi István University, Széchenyi István University, Széchenyi István University, H-9026,H-9026, Győr, Győr, Egyetem Egyetem t. 1, Hungaryt. 1, Hungary DepartmentH-9026,H-9026, of TelecommunicationsGyőr, Győr, Egyetem Egyetem t. t.1, Hungary1,,Hungary Department of Telecommunications, -

Georg Neumann - Wikipedia, the Free Encyclopedia 8/21/10 6:37 AM
Georg Neumann - Wikipedia, the free encyclopedia 8/21/10 6:37 AM Georg Neumann From Wikipedia, the free encyclopedia Georg Neumann GmbH (Neumann), founded in 1928 and based in Berlin, Germany, is a prominent manufacturer of professional recording microphones. Their best-known products are condenser microphones for broadcast, live and music production purposes. For several decades Neumann was also a leading manufacturer of cutting lathes for phonograph disks, and even ventured into the field of mixing desks for a while. Contents 1 History 1.1 Early years A classic Neumann U87 1.2 Postwar period microphone 1.3 The end of the fifties 1.4 The sixties 1.5 The eighties and beyond 2 See also 3 External links History Early years The company's original product was the CMV 3, the world's first commercially available condenser microphone. It was a rather large (40 cm tall, 9 cm diameter) microphone with several interchangeable capsule heads which gave it different directional patterns. Because of its shape and size, this microphone was often known as the "Neumann bottle". It is often seen in historical photographs of public events in Germany through the period of World War II. Neumann's factory in Berlin was damaged by Allied firebombing in November, 1943. Georg Neumann relocated his company to the much smaller town of Gefell and resumed production at the beginning of the following year. At the close of the war, this province fell under Soviet control and the company eventually became a "people's corporation" (i.e. a state-run enterprise). After the reunification of Germany, the company in Gefell, which had continued to use the Neumann name, became known as Microtech Gefell. -

Reducing Microphone Artefacts in Live Sound Clifford, Alice
Reducing Microphone Artefacts in Live Sound Clifford, Alice The copyright of this thesis rests with the author and no quotation from it or information derived from it may be published without the prior written consent of the author For additional information about this publication click this link. http://qmro.qmul.ac.uk/jspui/handle/123456789/8383 Information about this research object was correct at the time of download; we occasionally make corrections to records, please therefore check the published record when citing. For more information contact [email protected] Reducing Microphone Artefacts in Live Sound Alice Clifford Centre for Digital Music School of Electronic Engineering and Computer Science Queen Mary, University of London Thesis submitted in partial fulfilment of the requirements of the University of London for the Degree of Doctor of Philosophy 2013 I certify that this thesis, and the research to which it refers, are the product of my own work, and that any ideas or quotations from the work of other people, published or otherwise, are fully acknowledged in accordance with the standard referencing practices of the discipline. I acknowledge the helpful guidance and support of my supervisor, Dr Joshua Reiss. 2 Abstract This thesis presents research into reducing microphone artefacts in live sound with no prior knowledge of the sources or microphones. Microphone artefacts are defined as additional sounds or distortions that occur on a microphone signal that are often undesired. We focus on the proximity effect, comb filtering and microphone bleed. In each case we present a method that either automatically implements human sound engineering techniques or we present a novel method that makes use of audio signal processing techniques that goes beyond the skills of a sound engi- neer.