Stator Thermal Time Constant
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Application Note AN-1057
Application Note AN-1057 Heatsink Characteristics Table of Contents Page Introduction.........................................................................................................1 Maximization of Thermal Management .............................................................1 Heat Transfer Basics ..........................................................................................1 Terms and Definitions ........................................................................................2 Modes of Heat Transfer ......................................................................................2 Conduction..........................................................................................................2 Convection ..........................................................................................................5 Radiation .............................................................................................................9 Removing Heat from a Semiconductor...........................................................11 Selecting the Correct Heatsink........................................................................11 In many electronic applications, temperature becomes an important factor when designing a system. Switching and conduction losses can heat up the silicon of the device above its maximum Junction Temperature (Tjmax) and cause performance failure, breakdown and worst case, fire. Therefore the temperature of the device must be calculated not to exceed the Tjmax. To design a good -

How Air Velocity Affects the Thermal Performance of Heat Sinks: a Comparison of Straight Fin, Pin Fin and Maxiflowtm Architectures
How Air Velocity Affects The Thermal Performance of Heat Sinks: A Comparison of Straight Fin, Pin Fin and maxiFLOWTM Architectures Introduction A device’s temperature affects its op- erational performance and lifetime. To Air, Ta achieve a desired device temperature, Heat sink the heat dissipated by the device must be transferred along some path to the Rhs environment [1]. The most common method for transferring this heat is by finned metal devices, otherwise known Rsp as heat sinks. Base Resistance to heat transfer is called TIM thermal resistance. The thermal resis- RTIM tance of a heat sink decreases with . Component case, Tc Q Component more heat transfer area. However, be- cause device and equipment sizes are decreasing, heat sink sizes are also Figure 1. Exploded View of a Straight Fin Heat Sink with Corresponding Thermal Resis- tance Diagram. growing smaller. On the other hand, . device heat dissipation is increasing. heat sink selection criteria. Q RTIM, as shown in Equation 2. Therefore, designing a heat transfer The heat transfer rate of a heat sink, , . path in a limited space that minimizes depends on the difference between the Q = (Thot - Tcold)/Rt = (Tc - Ta)/Rt (1) thermal resistance is critical to the ef- component case temperature, Tc, and fective design of electronic equipment. the air temperature, Ta, along with the where total thermal resistance, Rt. This rela- This article discusses the effects of air tionship is shown in Equation 1. For Rt = RTIM + Rsp + Rhs (2) flow velocity on the experimentally de- a basic heat sink design, as shown in termined thermal resistance of different Figure 1, the total thermal resistance Therefore, to compare different heat heat sink designs. -

Guide for the Use of the International System of Units (SI)
Guide for the Use of the International System of Units (SI) m kg s cd SI mol K A NIST Special Publication 811 2008 Edition Ambler Thompson and Barry N. Taylor NIST Special Publication 811 2008 Edition Guide for the Use of the International System of Units (SI) Ambler Thompson Technology Services and Barry N. Taylor Physics Laboratory National Institute of Standards and Technology Gaithersburg, MD 20899 (Supersedes NIST Special Publication 811, 1995 Edition, April 1995) March 2008 U.S. Department of Commerce Carlos M. Gutierrez, Secretary National Institute of Standards and Technology James M. Turner, Acting Director National Institute of Standards and Technology Special Publication 811, 2008 Edition (Supersedes NIST Special Publication 811, April 1995 Edition) Natl. Inst. Stand. Technol. Spec. Publ. 811, 2008 Ed., 85 pages (March 2008; 2nd printing November 2008) CODEN: NSPUE3 Note on 2nd printing: This 2nd printing dated November 2008 of NIST SP811 corrects a number of minor typographical errors present in the 1st printing dated March 2008. Guide for the Use of the International System of Units (SI) Preface The International System of Units, universally abbreviated SI (from the French Le Système International d’Unités), is the modern metric system of measurement. Long the dominant measurement system used in science, the SI is becoming the dominant measurement system used in international commerce. The Omnibus Trade and Competitiveness Act of August 1988 [Public Law (PL) 100-418] changed the name of the National Bureau of Standards (NBS) to the National Institute of Standards and Technology (NIST) and gave to NIST the added task of helping U.S. -

Is the Thermal Resistance Coefficient of High-Power Leds Constant? Lalith Jayasinghe, Tianming Dong, and Nadarajah Narendran
Is the Thermal Resistance Coefficient of High-power LEDs Constant? Lalith Jayasinghe, Tianming Dong, and Nadarajah Narendran Lighting Research Center Rensselaer Polytechnic Institute, Troy, NY 12180 www.lrc.rpi.edu Jayasinghe, L., T. Dong, and N. Narendran. 2007. Is the thermal resistance coefficient of high-power LEDs constant? Seventh International Conference on Solid State Lighting, Proceedings of SPIE 6669: 666911. Copyright 2007 Society of Photo-Optical Instrumentation Engineers. This paper was published in the Seventh International Conference on Solid State Lighting, Proceedings of SPIE and is made available as an electronic reprint with permission of SPIE. One print or electronic copy may be made for personal use only. Systematic or multiple reproduction, distribution to multiple locations via electronic or other means, duplication of any material in this paper for a fee or for commercial purposes, or modification of the content of the paper are prohibited. Is the Thermal Resistance Coefficient of High-power LEDs Constant? Lalith Jayasinghe*, Tianming Dong, and Nadarajah Narendran Lighting Research Center, Rensselaer Polytechnic Institute 21 Union St., Troy, New York, 12180 USA ABSTRACT In this paper, we discuss the variations of thermal resistance coefficient from junction to board (RӨjb) for high-power light-emitting diodes (LEDs) as a result of changes in power dissipation and ambient temperature. Three-watt white and blue LED packages from the same manufacturer were tested for RӨjb at different input power levels and ambient temperatures. Experimental results show that RӨjb increases with increased input power for both LED packages, which can be attributed to current crowding mostly and some to the conductivity changes of GaN and TIM materials caused by heat rise. -

Thermal-Electrical Analogy: Thermal Network
Chapter 3 Thermal-electrical analogy: thermal network 3.1 Expressions for resistances Recall from circuit theory that resistance �"#"$ across an element is defined as the ratio of electric potential difference Δ� across that element, to electric current I traveling through that element, according to Ohm’s law, � � = "#"$ � (3.1) Within the context of heat transfer, the respective analogues of electric potential and current are temperature difference Δ� and heat rate q, respectively. Thus we can establish “thermal circuits” if we similarly establish thermal resistances R according to Δ� � = � (3.2) Medium: λ, cross-sectional area A Temperature T Temperature T Distance r Medium: λ, length L L Distance x (into the page) Figure 3.1: System geometries: planar wall (left), cylindrical wall (right) Planar wall conductive resistance: Referring to Figure 3.1 left, we see that thermal resistance may be obtained according to T1,3 − T1,5 � �, $-./ = = (3.3) �, �� The resistance increases with length L (it is harder for heat to flow), decreases with area A (there is more area for the heat to flow through) and decreases with conductivity �. Materials like styrofoam have high resistance to heat flow (they make good thermal insulators) while metals tend to have high low resistance to heat flow (they make poor insulators, but transmit heat well). Cylindrical wall conductive resistance: Referring to Figure 3.1 right, we have conductive resistance through a cylindrical wall according to T1,3 − T1,5 ln �5 �3 �9 $-./ = = (3.4) �9 2��� Convective resistance: The form of Newton’s law of cooling lends itself to a direct form of convective resistance, valid for either geometry. -
![Arxiv:1311.4868V1 [Cond-Mat.Mes-Hall] 19 Nov 2013](https://docslib.b-cdn.net/cover/4072/arxiv-1311-4868v1-cond-mat-mes-hall-19-nov-2013-1154072.webp)
Arxiv:1311.4868V1 [Cond-Mat.Mes-Hall] 19 Nov 2013
Anisotropic magneto-thermal transport and Spin-Seebeck effect J.-E. Wegrowe∗ and H.-J. Drouhin Ecole Polytechnique, LSI, CNRS and CEA/DSM/IRAMIS, Palaiseau F-91128, France D. Lacour Institut Jean Lamour, UMR CNRS 7198, Universit´eH. Poincarr´e,F -5406 Vandoeuvre les Nancy, France (Dated: August 21, 2021) Abstract The angular dependence of the thermal transport in insulating or conducting ferromagnets is derived on the basis of the Onsager reciprocity relations applied to a magnetic system. It is shown that the angular dependence of the temperature gradient takes the same form as that of the anisotropic magnetoresistance, including anomalous and planar Hall contributions. The measured thermocouple generated between the extremities of the non-magnetic electrode in thermal contact to the ferromagnet follows this same angular dependence. The sign and amplitude of the magneto- voltaic signal is controlled by the difference of the Seebeck coefficients of the thermocouple. PACS numbers: 85.80.Lp, 85.75.-d, 72.20.Pa arXiv:1311.4868v1 [cond-mat.mes-hall] 19 Nov 2013 ∗Electronic address: [email protected] 1 Exploiting the properties of heat currents in magnetic systems for data processing and storage is a decisive challenge for the future of electronic devices and sensors. Recent research efforts, in line with spintronics developments, focus more specifically on the properties of the spin degrees of freedom associated to the electric charges and heat currents [1]. Important series of experiments - the so-called spin-pumping and spin-Seebeck measurements - have been performed in this context [2{12]: a magneto-voltaic signal is observed at zero electric current on electrodes that are in thermal contact with a ferromagnet. -

Some Thermal Resistance Values
Some Thermal Resistance Values Assuming constant thickness of given material Substance R (1 inch) R (1cm) (imperial units) (metric units) Air (non-convecting) 6 0.42 Copper 3.7x10-4 2.6x10-5 Plywood 1.25 8.6x10-2 Glass 0.18 1.3x10-2 Brick 0.11 7.7x10-3 Concrete 0.14 1.0x10-2 Fiberglass batts 3.6 0.25 Polyurethane foam 6.3 0.43 McFarland pg 16-8 To obtain actual R value, multiply by number of inches/cm of thickness Typical R values for various structures Structure R value R value ft2hr°F/Btu m2K/W 2x4 wall with 11 1.94 fiberglass insulation 2x4 wall with 22 3.87 polyurethane foam insulation Ceiling with 11 in. 38 6.87 fiberglass batts Ceiling with 14 in. 49 8.63 fiberglass batts ex Example (imperial units) A homeowner has a total ceiling area of (50 ft)x(20 ft) = 1000 ft2 Currently the attic is insulated with fiberglass insulation having an R value of 8 (“R8”) Question: If the winter temperature is 32°F and the house interior is at 72°F, how much heat is lost through the ceiling assuming no air leakage (just conduction) Q Q 1 1 Btu From ∆T = R we have = A∆T = (1000)(40) = 5000 At t R 8 hr Btu 1055J 1hr Convert 5000 = 1465W = 1.47kW to kW: hr 1Btu 3600s Question: If the homeowner increases to R38 insulation, by what fraction will the heat loss decrease? Heat loss is proportional to 1/R value, therefore the loss will decrease by a fraction (1/38)/(1/8)= 0.21 Role of Fiberglass insulation e.g. -

Lifetime Modelling Issues of Power Light Emitting Diodes
energies Article Lifetime Modelling Issues of Power Light Emitting Diodes János Hegedüs, Gusztáv Hantos and András Poppe * Department of Electron Devices, Budapest University of Technology and Economics, 1117 Budapest, Hungary; [email protected] (J.H.); [email protected] (G.H.) * Correspondence: [email protected]; Tel.: +36-1-463-2721 Received: 27 May 2020; Accepted: 23 June 2020; Published: 1 July 2020 Abstract: The advantages of light emitting diodes (LEDs) over previous light sources and their continuous spread in lighting applications is now indisputable. Still, proper modelling of their lifespan offers additional design possibilities, enhanced reliability, and additional energy-saving opportunities. Accurate and rapid multi-physics system level simulations could be performed in Spice compatible environments, revealing the optical, electrical and even the thermal operating parameters, provided, that the compact thermal model of the prevailing luminaire and the appropriate elapsed lifetime dependent multi-domain models of the applied LEDs are available. The work described in this article takes steps in this direction in by extending an existing multi-domain LED model in order to simulate the major effect of the elapsed operating time of LEDs used. Our approach is based on the LM-80-08 testing method, supplemented by additional specific thermal measurements. A detailed description of the TM-21-11 type extrapolation method is provided in this paper along with an extensive overview of the possible aging models that could be used for practice-oriented LED lifetime estimations. Keywords: power LED measurement and simulation; life testing; reliability testing; LM-80; TM-21; LED lifetime modelling; LED multi-domain modelling; Spice-like modelling of LEDs; lifetime extrapolation and modelling of LEDs 1. -

Thermal Resistance Measurements
NiST PUBLICATIONS / W \ NIST SPECIAL PUBLICATION 400-86 U.S. DEPARTMENT OF COMMERCE /National Institute of Standards and Technology aoo-86 1990 C.2 NATIONAL INSTITUTE OF STANDARDS & TECHNOLOGY Researdi Infcmnatiofi Center Gakhersburg, MD 20899 DATE DUE Demco. Inc. 38-293 Semiconductor Measurement Technology: Thermal Resistance Measurements Frank F. Oettinger and David L. Blackburn Semiconductor Electronics Division Center for Electronics and Electrical Engineering National Engineering Laboratory National Institute of Standards and Technology Gaithersburg, MD 20899 July 1990 U.S. DEPARTMENT OF COMMERCE, Robert A. Mosbacher, Secretary NATIONAL INSTITUTE OF STANDARDS AND TECHNOLOGY, John W. Lyons, Director National Institute of Standards and Technology Special Publication 400-86 Natl. Inst. Stand. Technol. Spec. Publ. 400-86, 78 pages (July 1990) CODEN: NSPUE2 U.S. GOVERNMENT PRINTING OFFICE WASHINGTON: 1990 For sale by the Superintendent of Documents, U.S. Government Printing Office, Washington, DC 20402-9325 Semiconductor Measurement Technology: THERMAL RESISTANCE MEASUREMENTS Table of Contents Page I. POWER TRANSISTORS 1 Introduction 1 The Concept of Thermal Resistance 2 The Effect of Nonuniform Junction Temperature on the Definition of Rqjr ... 2 The Variation of Rqjr with Device Operating Conditions (/c?^CJs) 3 General Methods for Measuring Device Temperature 7 Control of the Thermal Environment 13 Selection of Temperature-Sensitive Electrical Parameters 14 Measurement of Temperature- Sensitive Electrical Parameters 17 Safe-Operating- Area Limits 21 DC Thermal Limit 21 Second Breakdown Limit 26 Relating the Chip Temperature to the Measured Temperature 29 Determination of Area of Power Generation and Peak Junction Temperature . 29 Detection of Onset of Current Constrictions 33 Reasons for Measuring Temperature 33 Measurement of Integrated Power Devices 38 Power Transistor Thermal Standardization Activities 41 II. -
How to Calculate “R” Values
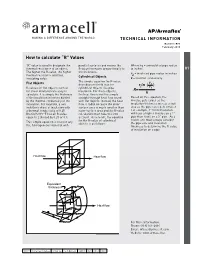
TECHNICAL INFORMATION Bulletin #01 February 2018 How to calculate “R” Values “R” value is used to designate the parallel surfaces and means the Where r1 = uninsulated pipe radius thermal resistance of an object. R-value increases proportionally to in inches 01 The higher the R-value, the higher the thickness. r2 = insulated pipe radius in inches thermal resistance and thus, Cylindrical Objects insulating value. k = thermal conductivity The simple equation for R-value Flat Objects r does does not hold true for r ln 2 2 ( r ( R-values for flat objects such as cylindrical objects like pipe R= 1 for sheet insulation are easy to insulation. For these objects, k calculate. It is simply the thickness the heat flow is not the simple of the insulation in inches divided straight-through heat flow found Based on this equation, the by the thermal conductivity of the with flat objects. Instead, the heat R-value gets larger as the insulation. For example, a two flow is radial because the inner insulation thickness increases but inch thick sheet of insulation with surface area is much smaller than also as the pipe sizes gets smaller. a thermal conductivity of 0.25 outer surface area and the R-value For example, 1" thick insulation Btu•in/h•ft2•°F has an R-value calculation must take this into will have a higher R-value on a 1" equal to 2 divided by 0.25 or 8.0. account. As a result, the equation pipe than it will on a 3" pipe. As a for the R-value of cylindrical result, one must always consider This simple equation is true for any objects is as follows: the pipe size and insulation flat, homogeneous material with thickness to determine the R-value of insulation on a pipe. -

The Bridge Between the Device and System of Thermoelectric Power
Electronic Supplementary Material (ESI) for Energy & Environmental Science. This journal is © The Royal Society of Chemistry 2020 1 Supporting Information for 2 System efficiency and power: the bridge between the device and 3 system of thermoelectric power generator 4 Kang Zhu1,2, Biao Deng1,2, Pengxiang Zhang1,2, Hee Seok Kim3, 5 Peng Jiang4 and Weishu Liu1,2* 6 1 Department of Materials Science and Engineering, Southern University of Science and Technology, Shenzhen, 7 Guangdong 518055, China 8 2 Shenzhen Engineering Research Center for Novel Electronic Information Materials and Devices, Southern 9 University of Science and Technology, Shenzhen, Guangdong 518055, China 10 3 Department of Mechanical Engineering, University of South Alabama, Mobile, Alabama 36688, USA 11 4 State Key Laboratory of Catalysis, CAS Center for Excellence in Nanoscience, Dalian Institute of Chemical 12 Physics, Chinese Academy of Sciences, Dalian, Liaoning 116023, China 13 *Email: [email protected] 14 15 1. Derivation of the Governing Equation of a Thermoelectric Process 16 The earlier works by Callen1 and Domenicali2 are reviewed, to present a complete derivation 17 of the differential equation which governs the temperature distribution in a thermoelectric leg in 18 steady state. The particle current density, the energy current density and the entropy current 19 density within a TE leg are respectively denoted as 퐽⃗, 푊⃗ and 푆⃗. The heat current density is by 20 definition written as 푞⃗ = 푇푆⃗. In a steady-state process the following conditions should be met, 21 ∇ ∙ 푊⃗ = 0#(푆1) 22 ∇ ∙ 퐽⃗ = 0#(푆2) 23 ∇ ∙ 푆⃗ = 푆̇ #(푆3) 24 where 푆̇ is the entropy production rate per unit volume. -
Recommended Practice for the Use of Metric (SI) Units in Building Design and Construction NATIONAL BUREAU of STANDARDS
<*** 0F ^ ££v "ri vt NBS TECHNICAL NOTE 938 / ^tTAU Of U.S. DEPARTMENT OF COMMERCE/ 1 National Bureau of Standards ^^MMHHMIB JJ Recommended Practice for the Use of Metric (SI) Units in Building Design and Construction NATIONAL BUREAU OF STANDARDS 1 The National Bureau of Standards was established by an act of Congress March 3, 1901. The Bureau's overall goal is to strengthen and advance the Nation's science and technology and facilitate their effective application for public benefit. To this end, the Bureau conducts research and provides: (1) a basis for the Nation's physical measurement system, (2) scientific and technological services for industry and government, (3) a technical basis for equity in trade, and (4) technical services to pro- mote public safety. The Bureau consists of the Institute for Basic Standards, the Institute for Materials Research, the Institute for Applied Technology, the Institute for Computer Sciences and Technology, the Office for Information Programs, and the Office of Experimental Technology Incentives Program. THE ENSTITUTE FOR BASIC STANDARDS provides the central basis within the United States of a complete and consist- ent system of physical measurement; coordinates that system with measurement systems of other nations; and furnishes essen- tial services leading to accurate and uniform physical measurements throughout the Nation's scientific community, industry, and commerce. The Institute consists of the Office of Measurement Services, and the following center and divisions: Applied Mathematics — Electricity