Spacecraft Relative Orbit Description Through Orbit Element Differences
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Low Thrust Manoeuvres to Perform Large Changes of RAAN Or Inclination in LEO
Facoltà di Ingegneria Corso di Laurea Magistrale in Ingegneria Aerospaziale Master Thesis Low Thrust Manoeuvres To Perform Large Changes of RAAN or Inclination in LEO Academic Tutor: Prof. Lorenzo CASALINO Candidate: Filippo GRISOT July 2018 “It is possible for ordinary people to choose to be extraordinary” E. Musk ii Filippo Grisot – Master Thesis iii Filippo Grisot – Master Thesis Acknowledgments I would like to address my sincere acknowledgments to my professor Lorenzo Casalino, for your huge help in these moths, for your willingness, for your professionalism and for your kindness. It was very stimulating, as well as fun, working with you. I would like to thank all my course-mates, for the time spent together inside and outside the “Poli”, for the help in passing the exams, for the fun and the desperation we shared throughout these years. I would like to especially express my gratitude to Emanuele, Gianluca, Giulia, Lorenzo and Fabio who, more than everyone, had to bear with me. I would like to also thank all my extra-Poli friends, especially Alberto, for your support and the long talks throughout these years, Zach, for being so close although the great distance between us, Bea’s family, for all the Sundays and summers spent together, and my soccer team Belfiga FC, for being the crazy lovable people you are. A huge acknowledgment needs to be address to my family: to my grandfather Luciano, for being a great friend; to my grandmother Bianca, for teaching me what “fighting” means; to my grandparents Beppe and Etta, for protecting me -
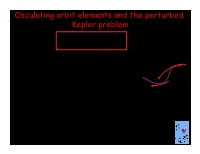
Osculating Orbit Elements and the Perturbed Kepler Problem
Osculating orbit elements and the perturbed Kepler problem Gmr a = 3 + f(r, v,t) Same − r x & v Define: r := rn ,r:= p/(1 + e cos f) ,p= a(1 e2) − osculating orbit he sin f h v := n + λ ,h:= Gmp p r n := cos ⌦cos(! + f) cos ◆ sinp ⌦sin(! + f) e − X +⇥ sin⌦cos(! + f) + cos ◆ cos ⌦sin(! + f⇤) eY actual orbit +sin⇥ ◆ sin(! + f) eZ ⇤ λ := cos ⌦sin(! + f) cos ◆ sin⌦cos(! + f) e − − X new osculating + sin ⌦sin(! + f) + cos ◆ cos ⌦cos(! + f) e orbit ⇥ − ⇤ Y +sin⇥ ◆ cos(! + f) eZ ⇤ hˆ := n λ =sin◆ sin ⌦ e sin ◆ cos ⌦ e + cos ◆ e ⇥ X − Y Z e, a, ω, Ω, i, T may be functions of time Perturbed Kepler problem Gmr a = + f(r, v,t) − r3 dh h = r v = = r f ⇥ ) dt ⇥ v h dA A = ⇥ n = Gm = f h + v (r f) Gm − ) dt ⇥ ⇥ ⇥ Decompose: f = n + λ + hˆ R S W dh = r λ + r hˆ dt − W S dA Gm =2h n h + rr˙ λ rr˙ hˆ. dt S − R S − W Example: h˙ = r S d (h cos ◆)=h˙ e dt · Z d◆ h˙ cos ◆ h sin ◆ = r cos(! + f)sin◆ + r cos ◆ − dt − W S Perturbed Kepler problem “Lagrange planetary equations” dp p3 1 =2 , dt rGm 1+e cos f S de p 2 cos f + e(1 + cos2 f) = sin f + , dt Gm R 1+e cos f S r d◆ p cos(! + f) = , dt Gm 1+e cos f W r d⌦ p sin(! + f) sin ◆ = , dt Gm 1+e cos f W r d! 1 p 2+e cos f sin(! + f) = cos f + sin f e cot ◆ dt e Gm − R 1+e cos f S− 1+e cos f W r An alternative pericenter angle: $ := ! +⌦cos ◆ d$ 1 p 2+e cos f = cos f + sin f dt e Gm − R 1+e cos f S r Perturbed Kepler problem Comments: § these six 1st-order ODEs are exactly equivalent to the original three 2nd-order ODEs § if f = 0, the orbit elements are constants § if f << Gm/r2, use perturbation theory -

Voices of Feminism Oral History Project: Roma, Catherine
Voices of Feminism Oral History Project Sophia Smith Collection, Smith College Northampton, MA CATHERINE ROMA Interviewed by JOYCE FOLLET June 19 and 20, 2005 Northampton, Massachusetts This interview was made possible with generous support from the Ford Foundation. © Sophia Smith Collection 2006 Sophia Smith Collection Voices of Feminism Oral History Project Narrator Catherine Roma was born in Philadelphia January 29, 1948, the youngest of three children of Italian-born parents. Her mother completed high school and, once married, was a community volunteer. Her father graduated from Princeton University and Temple Law School, but when his own father died young, he left legal practice to run the family’s barbershops in Philadelphia and other East Coast railroad terminals. Practicing Catholics, Catherine’s parents sent her to Germantown Friends School K-12; she remains a Convinced Friend. In the late 1960s and early 1970s, Roma earned a BA in music and an MM in Choral Conducting at the University of Wisconsin-Madison, where she became involved in socialist-feminist politics and began organizing a feminist choral group in 1974. Returning to Philadelphia the following year to teach music at Abington Friends School, she organized and conducted Anna Crusis, the first feminist women’s choir in the US. In 1983 she undertook the doctorate in musical arts at the University of Cincinnati, where she founded MUSE, the community chorus she continues to lead. Under Roma’s leadership, MUSE is a vital group in what has become a national and international grassroots movement of women’s choruses. MUSE is recognized as a model anti-racist community organization and a progressive force in Cincinnati politics. -

Appendix a Orbits
Appendix A Orbits As discussed in the Introduction, a good ¯rst approximation for satellite motion is obtained by assuming the spacecraft is a point mass or spherical body moving in the gravitational ¯eld of a spherical planet. This leads to the classical two-body problem. Since we use the term body to refer to a spacecraft of ¯nite size (as in rigid body), it may be more appropriate to call this the two-particle problem, but I will use the term two-body problem in its classical sense. The basic elements of orbital dynamics are captured in Kepler's three laws which he published in the 17th century. His laws were for the orbital motion of the planets about the Sun, but are also applicable to the motion of satellites about planets. The three laws are: 1. The orbit of each planet is an ellipse with the Sun at one focus. 2. The line joining the planet to the Sun sweeps out equal areas in equal times. 3. The square of the period of a planet is proportional to the cube of its mean distance to the sun. The ¯rst law applies to most spacecraft, but it is also possible for spacecraft to travel in parabolic and hyperbolic orbits, in which case the period is in¯nite and the 3rd law does not apply. However, the 2nd law applies to all two-body motion. Newton's 2nd law and his law of universal gravitation provide the tools for generalizing Kepler's laws to non-elliptical orbits, as well as for proving Kepler's laws. -

Astrodynamics
Politecnico di Torino SEEDS SpacE Exploration and Development Systems Astrodynamics II Edition 2006 - 07 - Ver. 2.0.1 Author: Guido Colasurdo Dipartimento di Energetica Teacher: Giulio Avanzini Dipartimento di Ingegneria Aeronautica e Spaziale e-mail: [email protected] Contents 1 Two–Body Orbital Mechanics 1 1.1 BirthofAstrodynamics: Kepler’sLaws. ......... 1 1.2 Newton’sLawsofMotion ............................ ... 2 1.3 Newton’s Law of Universal Gravitation . ......... 3 1.4 The n–BodyProblem ................................. 4 1.5 Equation of Motion in the Two-Body Problem . ....... 5 1.6 PotentialEnergy ................................. ... 6 1.7 ConstantsoftheMotion . .. .. .. .. .. .. .. .. .... 7 1.8 TrajectoryEquation .............................. .... 8 1.9 ConicSections ................................... 8 1.10 Relating Energy and Semi-major Axis . ........ 9 2 Two-Dimensional Analysis of Motion 11 2.1 ReferenceFrames................................. 11 2.2 Velocity and acceleration components . ......... 12 2.3 First-Order Scalar Equations of Motion . ......... 12 2.4 PerifocalReferenceFrame . ...... 13 2.5 FlightPathAngle ................................. 14 2.6 EllipticalOrbits................................ ..... 15 2.6.1 Geometry of an Elliptical Orbit . ..... 15 2.6.2 Period of an Elliptical Orbit . ..... 16 2.7 Time–of–Flight on the Elliptical Orbit . .......... 16 2.8 Extensiontohyperbolaandparabola. ........ 18 2.9 Circular and Escape Velocity, Hyperbolic Excess Speed . .............. 18 2.10 CosmicVelocities -

Orbit Options for an Orion-Class Spacecraft Mission to a Near-Earth Object
Orbit Options for an Orion-Class Spacecraft Mission to a Near-Earth Object by Nathan C. Shupe B.A., Swarthmore College, 2005 A thesis submitted to the Faculty of the Graduate School of the University of Colorado in partial fulfillment of the requirements for the degree of Master of Science Department of Aerospace Engineering Sciences 2010 This thesis entitled: Orbit Options for an Orion-Class Spacecraft Mission to a Near-Earth Object written by Nathan C. Shupe has been approved for the Department of Aerospace Engineering Sciences Daniel Scheeres Prof. George Born Assoc. Prof. Hanspeter Schaub Date The final copy of this thesis has been examined by the signatories, and we find that both the content and the form meet acceptable presentation standards of scholarly work in the above mentioned discipline. iii Shupe, Nathan C. (M.S., Aerospace Engineering Sciences) Orbit Options for an Orion-Class Spacecraft Mission to a Near-Earth Object Thesis directed by Prof. Daniel Scheeres Based on the recommendations of the Augustine Commission, President Obama has pro- posed a vision for U.S. human spaceflight in the post-Shuttle era which includes a manned mission to a Near-Earth Object (NEO). A 2006-2007 study commissioned by the Constellation Program Advanced Projects Office investigated the feasibility of sending a crewed Orion spacecraft to a NEO using different combinations of elements from the latest launch system architecture at that time. The study found a number of suitable mission targets in the database of known NEOs, and pre- dicted that the number of candidate NEOs will continue to increase as more advanced observatories come online and execute more detailed surveys of the NEO population. -

Electric Propulsion System Scaling for Asteroid Capture-And-Return Missions
Electric propulsion system scaling for asteroid capture-and-return missions Justin M. Little⇤ and Edgar Y. Choueiri† Electric Propulsion and Plasma Dynamics Laboratory, Princeton University, Princeton, NJ, 08544 The requirements for an electric propulsion system needed to maximize the return mass of asteroid capture-and-return (ACR) missions are investigated in detail. An analytical model is presented for the mission time and mass balance of an ACR mission based on the propellant requirements of each mission phase. Edelbaum’s approximation is used for the Earth-escape phase. The asteroid rendezvous and return phases of the mission are modeled as a low-thrust optimal control problem with a lunar assist. The numerical solution to this problem is used to derive scaling laws for the propellant requirements based on the maneuver time, asteroid orbit, and propulsion system parameters. Constraining the rendezvous and return phases by the synodic period of the target asteroid, a semi- empirical equation is obtained for the optimum specific impulse and power supply. It was found analytically that the optimum power supply is one such that the mass of the propulsion system and power supply are approximately equal to the total mass of propellant used during the entire mission. Finally, it is shown that ACR missions, in general, are optimized using propulsion systems capable of processing 100 kW – 1 MW of power with specific impulses in the range 5,000 – 10,000 s, and have the potential to return asteroids on the order of 103 104 tons. − Nomenclature -

AFSPC-CO TERMINOLOGY Revised: 12 Jan 2019
AFSPC-CO TERMINOLOGY Revised: 12 Jan 2019 Term Description AEHF Advanced Extremely High Frequency AFB / AFS Air Force Base / Air Force Station AOC Air Operations Center AOI Area of Interest The point in the orbit of a heavenly body, specifically the moon, or of a man-made satellite Apogee at which it is farthest from the earth. Even CAP rockets experience apogee. Either of two points in an eccentric orbit, one (higher apsis) farthest from the center of Apsis attraction, the other (lower apsis) nearest to the center of attraction Argument of Perigee the angle in a satellites' orbit plane that is measured from the Ascending Node to the (ω) perigee along the satellite direction of travel CGO Company Grade Officer CLV Calculated Load Value, Crew Launch Vehicle COP Common Operating Picture DCO Defensive Cyber Operations DHS Department of Homeland Security DoD Department of Defense DOP Dilution of Precision Defense Satellite Communications Systems - wideband communications spacecraft for DSCS the USAF DSP Defense Satellite Program or Defense Support Program - "Eyes in the Sky" EHF Extremely High Frequency (30-300 GHz; 1mm-1cm) ELF Extremely Low Frequency (3-30 Hz; 100,000km-10,000km) EMS Electromagnetic Spectrum Equitorial Plane the plane passing through the equator EWR Early Warning Radar and Electromagnetic Wave Resistivity GBR Ground-Based Radar and Global Broadband Roaming GBS Global Broadcast Service GEO Geosynchronous Earth Orbit or Geostationary Orbit ( ~22,300 miles above Earth) GEODSS Ground-Based Electro-Optical Deep Space Surveillance -

Orbit and Spin
Orbit and Spin Overview: A whole-body activity that explores the relative sizes, distances, orbit, and spin of the Sun, Earth, and Moon. Target Grade Level: 3-5 Estimated Duration: 2 40-minute sessions Learning Goals: Students will be able to… • compare the relative sizes of the Earth, Moon, and Sun. • contrast the distance between the Earth and Moon to the distance between the Earth and Sun. • differentiate between the motions of orbit and spin. • demonstrate the spins of the Earth and the Moon, as well as the orbits of the Earth around the Sun, and the Moon around the Earth. Standards Addressed: Benchmarks (AAAS, 1993) The Physical Setting, 4A: The Universe, 4B: The Earth National Science Education Standards (NRC, 1996) Physical Science, Standard B: Position and motion of objects Earth and Space Science, Standard D: Objects in the sky, Changes in Earth and sky Table of Contents: Background Page 1 Materials and Procedure 5 What I Learned… Science Journal Page 14 Earth Picture 15 Sun Picture 16 Moon Picture 17 Earth Spin Demonstration 18 Moon Orbit Demonstration 19 Extensions and Adaptations 21 Standards Addressed, detailed 22 Background: Sun The Sun is the center of our Solar System, both literally—as all of the planets orbit around it, and figuratively—as its rays warm our planet and sustain life as we know it. The Sun is very hot compared to temperatures we usually encounter. Its mean surface temperature is about 9980° Fahrenheit (5800 Kelvin) and its interior temperature is as high as about 28 million° F (15,500,000 Kelvin). -

Elliptical Orbits
1 Ellipse-geometry 1.1 Parameterization • Functional characterization:(a: semi major axis, b ≤ a: semi minor axis) x2 y 2 b p + = 1 ⇐⇒ y(x) = · ± a2 − x2 (1) a b a • Parameterization in cartesian coordinates, which follows directly from Eq. (1): x a · cos t = with 0 ≤ t < 2π (2) y b · sin t – The origin (0, 0) is the center of the ellipse and the auxilliary circle with radius a. √ – The focal points are located at (±a · e, 0) with the eccentricity e = a2 − b2/a. • Parameterization in polar coordinates:(p: parameter, 0 ≤ < 1: eccentricity) p r(ϕ) = (3) 1 + e cos ϕ – The origin (0, 0) is the right focal point of the ellipse. – The major axis is given by 2a = r(0) − r(π), thus a = p/(1 − e2), the center is therefore at − pe/(1 − e2), 0. – ϕ = 0 corresponds to the periapsis (the point closest to the focal point; which is also called perigee/perihelion/periastron in case of an orbit around the Earth/sun/star). The relation between t and ϕ of the parameterizations in Eqs. (2) and (3) is the following: t r1 − e ϕ tan = · tan (4) 2 1 + e 2 1.2 Area of an elliptic sector As an ellipse is a circle with radius a scaled by a factor b/a in y-direction (Eq. 1), the area of an elliptic sector PFS (Fig. ??) is just this fraction of the area PFQ in the auxiliary circle. b t 2 1 APFS = · · πa − · ae · a sin t a 2π 2 (5) 1 = (t − e sin t) · a b 2 The area of the full ellipse (t = 2π) is then, of course, Aellipse = π a b (6) Figure 1: Ellipse and auxilliary circle. -
Universal War Version 1.7 Better Looking Edition
Universal War Version 1.7 Better Looking Edition The Universal War I haven’t much time to recount any ridiculous histories before our time runs short, little Human. I will explain what I can. I will start at the beginning. After GOD died by his own hand Heaven was left empty and the OLD LAW was slowly abandoned by the Angels. The Demiurges, the only children of GOD, rebuilt the great works of Heaven. All 7,777,777,777 worlds were connected and for a time they were content to remain apart. They learned many secrets from the universe and lived in enlightenment and virtuous philosophy. It was not to last, of course. Their hunger grew. The Demiurges were warriors, not fat poets. They built weapons so great and powerful that reality itself was torn apart. With the order of the Angels gone, the Demiurges were free to do as they pleased and soon the Age of Prosperity led to the Age of Conquest. Wealth bred indulgence and want. Want… the curse of life itself. So began The Universal War. 7,777,777,777 universes burned. Worlds burned. And they went mad. You wouldn’t understand it Human. One must see it but you will see it soon. The Universal War ended when the Prime Angels intervened. The OLD LAW was upheld but it was far too late… Vigintillions were slaughtered and entire galaxies were lost forever. The God Gates were shut down and the ancient secrets of the Universe were lost. How quickly they forget. That was 500,000,000 years ago. -

Analysis of Transfer Maneuvers from Initial
Revista Mexicana de Astronom´ıa y Astrof´ısica, 52, 283–295 (2016) ANALYSIS OF TRANSFER MANEUVERS FROM INITIAL CIRCULAR ORBIT TO A FINAL CIRCULAR OR ELLIPTIC ORBIT M. A. Sharaf1 and A. S. Saad2,3 Received March 14 2016; accepted May 16 2016 RESUMEN Presentamos un an´alisis de las maniobras de transferencia de una ´orbita circu- lar a una ´orbita final el´ıptica o circular. Desarrollamos este an´alisis para estudiar el problema de las transferencias impulsivas en las misiones espaciales. Consideramos maniobras planas usando ecuaciones reci´enobtenidas; con estas ecuaciones se com- paran las maniobras circulares y el´ıpticas. Esta comparaci´on es importante para el dise˜no´optimo de misiones espaciales, y permite obtener mapeos ´utiles para mostrar cu´al es la mejor maniobra. Al respecto, desarrollamos este tipo de comparaciones mediante 10 resultados, y los mostramos gr´aficamente. ABSTRACT In the present paper an analysis of the transfer maneuvers from initial circu- lar orbit to a final circular or elliptic orbit was developed to study the problem of impulsive transfers for space missions. It considers planar maneuvers using newly derived equations. With these equations, comparisons of circular and elliptic ma- neuvers are made. This comparison is important for the mission designers to obtain useful mappings showing where one maneuver is better than the other. In this as- pect, we developed this comparison throughout ten results, together with some graphs to show their meaning. Key Words: celestial mechanics — methods: analytical — space vehicles 1. INTRODUCTION The large amount of information from interplanetary missions, such as Pioneer (Dyer et al.