Symbolic Computer Vector Analysis?
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Vectors and Beyond: Geometric Algebra and Its Philosophical
dialectica Vol. 63, N° 4 (2010), pp. 381–395 DOI: 10.1111/j.1746-8361.2009.01214.x Vectors and Beyond: Geometric Algebra and its Philosophical Significancedltc_1214 381..396 Peter Simons† In mathematics, like in everything else, it is the Darwinian struggle for life of ideas that leads to the survival of the concepts which we actually use, often believed to have come to us fully armed with goodness from some mysterious Platonic repository of truths. Simon Altmann 1. Introduction The purpose of this paper is to draw the attention of philosophers and others interested in the applicability of mathematics to a quiet revolution that is taking place around the theory of vectors and their application. It is not that new math- ematics is being invented – on the contrary, the basic concepts are over a century old – but rather that this old theory, having languished for many decades as a quaint backwater, is being rediscovered and properly applied for the first time. The philosophical importance of this quiet revolution is not that new applications for old mathematics are being found. That presumably happens much of the time. Rather it is that this new range of applications affords us a novel insight into the reasons why vectors and their mathematical kin find application at all in the real world. Indirectly, it tells us something general but interesting about the nature of the spatiotemporal world we all inhabit, and that is of philosophical significance. Quite what this significance amounts to is not yet clear. I should stress that nothing here is original: the history is quite accessible from several sources, and the mathematics is commonplace to those who know it. -

Recent Books on Vector Analysis. 463
1921.] RECENT BOOKS ON VECTOR ANALYSIS. 463 RECENT BOOKS ON VECTOR ANALYSIS. Einführung in die Vehtoranalysis, mit Anwendungen auf die mathematische Physik. By R. Gans. 4th edition. Leip zig and Berlin, Teubner, 1921. 118 pp. Elements of Vector Algebra. By L. Silberstein. New York, Longmans, Green, and Company, 1919. 42 pp. Vehtor analysis. By C. Runge. Vol. I. Die Vektoranalysis des dreidimensionalen Raumes. Leipzig, Hirzel, 1919. viii + 195 pp. Précis de Calcul géométrique. By R. Leveugle. Preface by H. Fehr. Paris, Gauthier-Villars, 1920. lvi + 400 pp. The first of these books is for the most part a reprint of the third edition, which has been reviewed in this BULLETIN (vol. 21 (1915), p. 360). Some small condensation of results has been accomplished by making deductions by purely vector methods. The author still clings to the rather common idea that a vector is a certain triple on a certain set of coordinate axes, so that his development is rather that of a shorthand than of a study of expressions which are not dependent upon axes. The second book is a quite brief exposition of the bare fundamentals of vector algebra, the notation being that of Heaviside, which Silberstein has used before. It is designed primarily to satisfy the needs of those studying geometric optics. However the author goes so far as to mention a linear vector operator and the notion of dyad. The exposition is very simple and could be followed by high school students who had had trigonometry. The third of the books mentioned is an elementary exposition of vectors from the standpoint of Grassmann. -

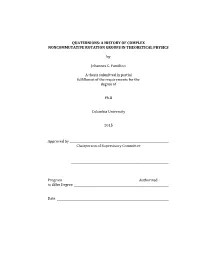
Geometric-Algebra Adaptive Filters Wilder B
1 Geometric-Algebra Adaptive Filters Wilder B. Lopes∗, Member, IEEE, Cassio G. Lopesy, Senior Member, IEEE Abstract—This paper presents a new class of adaptive filters, namely Geometric-Algebra Adaptive Filters (GAAFs). They are Faces generated by formulating the underlying minimization problem (a deterministic cost function) from the perspective of Geometric Algebra (GA), a comprehensive mathematical language well- Edges suited for the description of geometric transformations. Also, (directed lines) differently from standard adaptive-filtering theory, Geometric Calculus (the extension of GA to differential calculus) allows Fig. 1. A polyhedron (3-dimensional polytope) can be completely described for applying the same derivation techniques regardless of the by the geometric multiplication of its edges (oriented lines, vectors), which type (subalgebra) of the data, i.e., real, complex numbers, generate the faces and hypersurfaces (in the case of a general n-dimensional quaternions, etc. Relying on those characteristics (among others), polytope). a deterministic quadratic cost function is posed, from which the GAAFs are devised, providing a generalization of regular adaptive filters to subalgebras of GA. From the obtained update rule, it is shown how to recover the following least-mean squares perform calculus with hypercomplex quantities, i.e., elements (LMS) adaptive filter variants: real-entries LMS, complex LMS, that generalize complex numbers for higher dimensions [2]– and quaternions LMS. Mean-square analysis and simulations in [10]. a system identification scenario are provided, showing very good agreement for different levels of measurement noise. GA-based AFs were first introduced in [11], [12], where they were successfully employed to estimate the geometric Index Terms—Adaptive filtering, geometric algebra, quater- transformation (rotation and translation) that aligns a pair of nions. -

Josiah Willard Gibbs
GENERAL ARTICLE Josiah Willard Gibbs V Kumaran The foundations of classical thermodynamics, as taught in V Kumaran is a professor textbooks today, were laid down in nearly complete form by of chemical engineering at the Indian Institute of Josiah Willard Gibbs more than a century ago. This article Science, Bangalore. His presentsaportraitofGibbs,aquietandmodestmanwhowas research interests include responsible for some of the most important advances in the statistical mechanics and history of science. fluid mechanics. Thermodynamics, the science of the interconversion of heat and work, originated from the necessity of designing efficient engines in the late 18th and early 19th centuries. Engines are machines that convert heat energy obtained by combustion of coal, wood or other types of fuel into useful work for running trains, ships, etc. The efficiency of an engine is determined by the amount of useful work obtained for a given amount of heat input. There are two laws related to the efficiency of an engine. The first law of thermodynamics states that heat and work are inter-convertible, and it is not possible to obtain more work than the amount of heat input into the machine. The formulation of this law can be traced back to the work of Leibniz, Dalton, Joule, Clausius, and a host of other scientists in the late 17th and early 18th century. The more subtle second law of thermodynamics states that it is not possible to convert all heat into work; all engines have to ‘waste’ some of the heat input by transferring it to a heat sink. The second law also established the minimum amount of heat that has to be wasted based on the absolute temperatures of the heat source and the heat sink. -

Spacetime Algebra As a Powerful Tool for Electromagnetism
Spacetime algebra as a powerful tool for electromagnetism Justin Dressela,b, Konstantin Y. Bliokhb,c, Franco Norib,d aDepartment of Electrical and Computer Engineering, University of California, Riverside, CA 92521, USA bCenter for Emergent Matter Science (CEMS), RIKEN, Wako-shi, Saitama, 351-0198, Japan cInterdisciplinary Theoretical Science Research Group (iTHES), RIKEN, Wako-shi, Saitama, 351-0198, Japan dPhysics Department, University of Michigan, Ann Arbor, MI 48109-1040, USA Abstract We present a comprehensive introduction to spacetime algebra that emphasizes its prac- ticality and power as a tool for the study of electromagnetism. We carefully develop this natural (Clifford) algebra of the Minkowski spacetime geometry, with a particular focus on its intrinsic (and often overlooked) complex structure. Notably, the scalar imaginary that appears throughout the electromagnetic theory properly corresponds to the unit 4-volume of spacetime itself, and thus has physical meaning. The electric and magnetic fields are combined into a single complex and frame-independent bivector field, which generalizes the Riemann-Silberstein complex vector that has recently resurfaced in stud- ies of the single photon wavefunction. The complex structure of spacetime also underpins the emergence of electromagnetic waves, circular polarizations, the normal variables for canonical quantization, the distinction between electric and magnetic charge, complex spinor representations of Lorentz transformations, and the dual (electric-magnetic field exchange) symmetry that produces helicity conservation in vacuum fields. This latter symmetry manifests as an arbitrary global phase of the complex field, motivating the use of a complex vector potential, along with an associated transverse and gauge-invariant bivector potential, as well as complex (bivector and scalar) Hertz potentials. -

Geometric Intuition
thesis Geometric intuition Richard Feynman once made a statement represent the consequences of rotations in to the effect that the history of mathematics One day, perhaps, 3-space faithfully. is largely the history of improvements in Clifford’s algebra will It is also completely natural not only to add notation — the progressive invention of or subtract multi-vectors, but to multiply or ever more efficient means for describing be taught routinely to divide them — something not possible with logical relationships and making them students in place of ordinary vectors. The result is always another easier to grasp and manipulate. The Romans multi-vector. In the particular case of a were stymied in their efforts to advance vector analysis. multi-vector that is an ordinary vector V, the mathematics by the clumsiness of Roman inverse turns out to be V/v2, where v2 is the numerals for arithmetic calculations. After to j, that is, eiej = −ejei. Another way to put squared magnitude of V. It’s a vector in the Euclid, geometry stagnated for nearly it is that multiplication between parallel same direction but of reciprocal magnitude. 2,000 years until Descartes invented a new vectors is commutative, whereas it is anti- Write out the components for the notation with his coordinates, which made commutative for orthogonal vectors. product of two vectors U and V, and you it easy to represent points and lines in These rules are enough to define find the resultUV = U•V + ĬU × V, with • space algebraically. the algebra, and it’s then easy to work and × being the usual dot and cross product Feynman himself, of course, introduced out various implications. -

A Vectors, Tensors, and Their Operations
A Vectors, Tensors, and Their Operations A.1 Vectors and Tensors A spatial description of the fluid motion is a geometrical description, of which the essence is to ensure that relevant physical quantities are invariant under artificially introduced coordinate systems. This is realized by tensor analysis (cf. Aris 1962). Here we introduce the concept of tensors in an informal way, through some important examples in fluid mechanics. A.1.1 Scalars and Vectors Scalars and vectors are geometric entities independent of the choice of coor- dinate systems. This independence is a necessary condition for an entity to represent some physical quantity. A scalar, say the fluid pressure p or den- sity ρ, obviously has such independence. For a vector, say the fluid velocity u, although its three components (u1,u2,u3) depend on the chosen coordi- nates, say Cartesian coordinates with unit basis vectors (e1, e2, e3), as a single geometric entity the one-form of ei, u = u1e1 + u2e2 + u3e3 = uiei,i=1, 2, 3, (A.1) has to be independent of the basis vectors. Note that Einstein’s convention has been used in the last expression of (A.1): unless stated otherwise, a repeated index always implies summation over the dimension of the space. The inner (scalar) and cross (vector) products of two vectors are familiar. If θ is the angle between the directions of a and b, these operations give a · b = |a||b| cos θ, |a × b| = |a||b| sin θ. While the inner product is a projection operation, the cross-product produces a vector perpendicular to both a and b with magnitude equal to the area of the parallelogram spanned by a and b.Thusa×b determines a vectorial area 694 A Vectors, Tensors, and Their Operations with unit vector n normal to the (a, b) plane, whose direction follows from a to b by the right-hand rule. -

Project Gutenberg's Vector Analysis and Quaternions, by Alexander
Project Gutenberg’s Vector Analysis and Quaternions, by Alexander Macfarlane This eBook is for the use of anyone anywhere at no cost and with almost no restrictions whatsoever. You may copy it, give it away or re-use it under the terms of the Project Gutenberg License included with this eBook or online at www.gutenberg.net Title: Vector Analysis and Quaternions Author: Alexander Macfarlane Release Date: October 5, 2004 [EBook #13609] Language: English Character set encoding: TeX *** START OF THIS PROJECT GUTENBERG EBOOK VECTOR ANALYSIS AND QUATERNIONS *** Produced by David Starner, Joshua Hutchinson, John Hagerson, and the Project Gutenberg On-line Distributed Proofreaders. i MATHEMATICAL MONOGRAPHS. EDITED BY MANSFIELD MERRIMAN and ROBERT S. WOODWARD. No. 8. VECTOR ANALYSIS and QUATERNIONS. by ALEXANDER MACFARLANE, Secretary of International Association for Promoting the Study of Quaternions. NEW YORK: JOHN WILEY & SONS. London: CHAPMAN & HALL, Limited. 1906. Transcriber’s Notes: This material was originally published in a book by Merriman and Wood- ward titled Higher Mathematics. I believe that some of the page number cross-references have been retained from that presentation of this material. I did my best to recreate the index. ii MATHEMATICAL MONOGRAPHS. edited by Mansfield Merriman and Robert S. Woodward. Octavo. Cloth. $1.00 each. No. 1. History of Modern Mathematics. By David Eugene Smith. No. 2. Synthetic Projective Geometry. By George Bruce Halsted. No. 3. Determinants. By Laenas Gifford Weld. No. 4. Hyperbolic Functions. By James McMahon. No. 5. Harmonic Functions. By William E. Byerly. No. 6. Grassmann’s Space Analysis. By Edward W. Hyde. No. 7. Probability and Theory of Errors. -
Quaternions: a History of Complex Noncommutative Rotation Groups in Theoretical Physics
QUATERNIONS: A HISTORY OF COMPLEX NONCOMMUTATIVE ROTATION GROUPS IN THEORETICAL PHYSICS by Johannes C. Familton A thesis submitted in partial fulfillment of the requirements for the degree of Ph.D Columbia University 2015 Approved by ______________________________________________________________________ Chairperson of Supervisory Committee _____________________________________________________________________ _____________________________________________________________________ _____________________________________________________________________ Program Authorized to Offer Degree ___________________________________________________________________ Date _______________________________________________________________________________ COLUMBIA UNIVERSITY QUATERNIONS: A HISTORY OF COMPLEX NONCOMMUTATIVE ROTATION GROUPS IN THEORETICAL PHYSICS By Johannes C. Familton Chairperson of the Supervisory Committee: Dr. Bruce Vogeli and Dr Henry O. Pollak Department of Mathematics Education TABLE OF CONTENTS List of Figures......................................................................................................iv List of Tables .......................................................................................................vi Acknowledgements .......................................................................................... vii Chapter I: Introduction ......................................................................................... 1 A. Need for Study ........................................................................................ -

Chapter 1. Vector Analysis 1.1 Vector Algebra 1.1.1 Vector Operations
Chapter 1. Vector Analysis 1.1 Vector Algebra 1.1.1 Vector Operations Addition is commutative: A + B = B + A Addition is associative: (A + B) + C = A + (B + C) To subtract is to add its opposite: A - B = A + (-B) Dot product (= scalar product) is commutative: A . B = B . A Dot product (= scalar product) is distributive: A . (B + C) = A . B + A . C Cross product (= vector product) is not commutative: B x A = A x B Dot product (= vector product) is distributive: A x (B + C) = A x B + A x C 1.1.2 Vector Algebra: Component form Unit vectors Component form 1.1.2 Vector Algebra: Component form 1.1.3 Triple Products 1.1.3 Triple Products BAC-CAB rule 1.1.4 Position, Displacement, and Separation Vectors Position vector: Infinitesimal displacement vector: Separation vector from source point to field point: 1.1.5 How Vectors transform 1.2 Differential Calculus 1.2.1 “Ordinary” Derivatives 1.2.2 Gradient Gradient of T What’s the physical meaning of the Gradient: Gradient is a vector that points in the direction of maximum increase of a function. Its magnitude gives the slope (rate of increase) along this maximal direction. Gradient represents both the magnitude and the direction of the maximum rate of increase of a scalar function. 1.2.3 The Del Operator: : a vector operator, not a vector. (gradient) Gradient represents both the magnitude and the direction of the maximum rate of increase of a scalar function. (divergence) (curl) 1.2.4 The Divergence div AA A Ay A A x z : scalar, a measure of how much the vector A xyz spread out (diverges) from the point in question : positive (negative if the arrows pointed in) divergence : zero divergence : positive divergence 1.2.5 The Curl curl AAA rot : a vector, a measure of how much the vector A curl (rotate) around the point in question. -

Theories of Maxwellian Design
THEORIES OF MAXWELLIAN DESIGN Nicholas Wheeler, Reed College Physics Department January 1998 Some historical background. Anyone who has attempted to discover within the collected works of (say) Newton, Lagrange or Hamilton the equations that today celebrate the names and accomplishment of those great figures will not be surprised to learn that it requires patient searching to discover “Maxwell’s equations” within The Scientific Papers of James Clerk Maxwell.1 New babies are invariably dirty, and must be washed of extraneous material (recently so important to their prenatal lives) before we can appreciate how cute they are. And physics new a century or more ago tends to the modern eye (so unlike old music to the modern ear) to seem notationally—and sometimes also conceptually—quite obscure. Maxwell’s own notational conventions—he exhausted the alphabetical resources of several languages—were so cumbersome (and so consistently unlike their modern counterparts) that it seems wonderous that he was able to accomplish anything, or to remember from one day to the next what his symbols stood for. But in his “A Dynamical Theory of the Electromagnetic Field”2 the evidence of the text suggests clearly that he was at special pains underscore the essence of his accomplishment. Equations in that paper are numbered consecutively, from beginning to end, except for eight sets of equations displayed in his “part iii. general equations for the electromagnetic field,” which he identifies by letter. Those equations—“Maxwell’s equations,” as they came first into the world—are so seldom seen by modern eyes3 that I reproduce 1 Edited by W. -

Chapter 2. Vector Analysis
Cheng; 3/2/2009; 2-1 Chapter 2. Vector Analysis 2.1 Overview At a given position and time a scalar function → a magnitude, a vector function → a magnitude and a direction Function conversion between different coordinates Physical laws should be independent of the coordinates. Coordinate system is chosen by convenience Three main topics (1) Vector algebra : addition, subtraction, multiplication (2) Orthogonal coordinate system : Cartesian, Cylindrical, Spherical (3) Vector calculus : differentiation, integration(gradient, divergence, curl) 2.2 Vector Addition and Subtraction A vector has a magnitude and a direction AAa= A ↑ ↑ magnitude, A A unit vector, A Graphical representation Two vectors are equal if they have the same magnitude and direction, even though they may be displaced in space. • Vector addition, CA= + B Two vectors, AB and , form a plane Parallelogram rule : is the diagonal of the parallelogram C Head-To-Tail rule : The head of A touches the tail of B . C is drawn from the tail of A to the head of B . Cheng; 3/2/2009; 2-2 Note C =+=+A B B A Commutative law ABF++=++()() ABF Associative law • Vector subtraction ˆ AB−=+− Aej B, where −=−BaB()B 2.3 Vector Multiplication Multiplication of a vector by a positive scalar kA= bg kA a A A. Scalar or Dot Product AB•≡ ABcosθAB Note that •≤ (1) A B AB (2) •≤ •≥ A B 00 or A B •=× (3) A B A Projection of B onto A =B × Projection of A onto B (4) A •=B 0 when A and B are perpendicular to each other Note that A •=A A2 → AAA=• A •=•B B A : Commutative law ABF•+=•+•() ABAF : Distributive law Cheng; 3/2/2009; 2-3 Example Law of Cosine Use vectors to prove CAB222=+−2 ABcos α CBA=− CCCBABA2 =•⇒( −) •( −) ⇒•+•−•−•BB AAAB BA ⇒+−AB222cos AB α B.