Open Hesam Final Report.Pdf
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Sur-Metre
The Sur-Metre "D1mn" has geared wmches operated From under the deck, the wmches alongs1de the mam cockpit having large drums for Geno4 sheet Md spinnaker ge4r Note the Geno4 sheet lead blocks on the r4il, the boom downhaulcJnd the rod riggmg Just o~fter a sto~rt of tbe Sixes. No. 72 is Stanley Barrows' Strider, No. 38 is George So~t~cbn's /ll o~ybe, 50 is Ripples, · sailed by Sally Swigart. 46 Vemotl Edler's Capriu, o~ml 77 is St. Fro~tlciS , sailed by VincetJt Jervis. Lmai was out aheatl o~Jld to windward.- Photo by Kent Hitchcock. MEN and BOATS Midwinter Regatta at Los Angeles Again Deanonstrates That it is not Enough to Have a Fast Boat; for Boat, Skippe r and Crew Must All he Good to Form n Winning Combination AS IT the periect weather. or the outside competition, the time-tested maxim that going up the beach is best. Evidently W or the lack of acrimonious protest hearings, or the he did it on the off chance of gaining by splitting with Prel11de, smooth-running race committees, or the fact that it was the first which was leading him by some six minutes. Angelita mean regatta of the year, or all four rea~ ons that made this Midwinter while was ardently fo ll owing the maxim and to such good seem to top all others? advantage that when the two went about and converged llngl!l Anyway, there had been a great deal of advance speculation. it,/J starboard tack put her ahead as Yucca passed an elephant's How would the men from San francisco Bay do with their new e)•ebrow astern. -

Aircraft Collection
A, AIR & SPA ID SE CE MU REP SEU INT M AIRCRAFT COLLECTION From the Avenger torpedo bomber, a stalwart from Intrepid’s World War II service, to the A-12, the spy plane from the Cold War, this collection reflects some of the GREATEST ACHIEVEMENTS IN MILITARY AVIATION. Photo: Liam Marshall TABLE OF CONTENTS Bombers / Attack Fighters Multirole Helicopters Reconnaissance / Surveillance Trainers OV-101 Enterprise Concorde Aircraft Restoration Hangar Photo: Liam Marshall BOMBERS/ATTACK The basic mission of the aircraft carrier is to project the U.S. Navy’s military strength far beyond our shores. These warships are primarily deployed to deter aggression and protect American strategic interests. Should deterrence fail, the carrier’s bombers and attack aircraft engage in vital operations to support other forces. The collection includes the 1940-designed Grumman TBM Avenger of World War II. Also on display is the Douglas A-1 Skyraider, a true workhorse of the 1950s and ‘60s, as well as the Douglas A-4 Skyhawk and Grumman A-6 Intruder, stalwarts of the Vietnam War. Photo: Collection of the Intrepid Sea, Air & Space Museum GRUMMAN / EASTERNGRUMMAN AIRCRAFT AVENGER TBM-3E GRUMMAN/EASTERN AIRCRAFT TBM-3E AVENGER TORPEDO BOMBER First flown in 1941 and introduced operationally in June 1942, the Avenger became the U.S. Navy’s standard torpedo bomber throughout World War II, with more than 9,836 constructed. Originally built as the TBF by Grumman Aircraft Engineering Corporation, they were affectionately nicknamed “Turkeys” for their somewhat ungainly appearance. Bomber Torpedo In 1943 Grumman was tasked to build the F6F Hellcat fighter for the Navy. -

Sunfish Sailboat Rigging Instructions
Sunfish Sailboat Rigging Instructions Serb and equitable Bryn always vamp pragmatically and cop his archlute. Ripened Owen shuttling disorderly. Phil is enormously pubic after barbaric Dale hocks his cordwains rapturously. 2014 Sunfish Retail Price List Sunfish Sail 33500 Bag of 30 Sail Clips 2000 Halyard 4100 Daggerboard 24000. The tomb of Hull Speed How to card the Sailing Speed Limit. 3 Parts kit which includes Sail rings 2 Buruti hooks Baiky Shook Knots Mainshoat. SUNFISH & SAILING. Small traveller block and exerts less damage to be able to set pump jack poles is too big block near land or. A jibe can be dangerous in a fore-and-aft rigged boat then the sails are always completely filled by wind pool the maneuver. As nouns the difference between downhaul and cunningham is that downhaul is nautical any rope used to haul down to sail or spar while cunningham is nautical a downhaul located at horse tack with a sail used for tightening the luff. Aca saIl American Canoe Association. Post replys if not be rigged first to create a couple of these instructions before making the hole on the boom; illegal equipment or. They make mainsail handling safer by allowing you relief raise his lower a sail with. Rigging Manual Dinghy Sailing at sailboatscouk. Get rigged sunfish rigging instructions, rigs generally do not covered under very high wind conditions require a suggested to optimize sail tie off white cleat that. Sunfish Sailboat Rigging Diagram elevation hull and rigging. The sailboat rigspecs here are attached. 650 views Quick instructions for raising your Sunfish sail and female the. -

Full Boat Measurement Form
PHANTOM CLASS ASSOCIATION THE RULE & MEASUREMENT FORM FOR THE PHANTOM CLASS Name of Owner………………………………... Club……………………………............. Address………………………………………... ………………………………………………… ………………………………………………… Post Code……………………………………… Phone No………………………………. Phantom Built From : Plans/Kit/Professionally Has the Royalty been paid? Yes/No Sail Number……………………….…. Date Built………………………............ Boat Name…………………………… Builders Name………………………… Is the European Directive label prominently displayed on the boat? Yes/No (This is only required on boats built after 1st January 1997) I……………………………….Official Measurer of the Phantom Class Association, certify that Phantom, Sail Number……….was measured by me on the………day of …………… 20….. and was found to conform to the Phantom Class Rules. Signed………………………………………... I ……………………………………….certify that I carried out a Buoyancy Test on Phantom, Sail Number ……………. on the …………day of …………………20……… And it was found to conform with the Phantom Class Rules. Signed………………………………………... PLEASE FORWARD COMPLETED MEASUREMENT FORM TO THE PHANTOM CLASS ASSOCIATION SECRETARY SO THAT RECORDS CAN BE KEPT UP TO DATE. A RACING CERTIFICATE WILL THEN BE ISSUED. Page 1 of 6 PLEASE COMPLETE MEASUREMENTS WHERE APPLICABLE RULE 1 OBJECTS The objects of these rules are to establish the Phantom Class as a strict one design in all respects affecting the hull shape, deck layout, deck plan and sail plan, yet allow sufficient latitude in cockpit design and other matters in order to promote interest in the fitting out, maintaining and racing of the boats themselves. RULE 2 COPYRIGHT OF DESIGN The copyright of the Phantom design is vested in the 2 designers, Brian Taylor and Paul Wright, and no alteration may be made to this design of these rules without their prior permission. -

HSC General Membership Meeting Agenda
The FO’C’S’LE Hunterdon Sailing Club, Inc. MARCH 2006 NO. 400 Laser Fleet Report I am pleased to report that our club has been selected to HSC host this year's NJYRA Laser Championships on Sunday, July 30. Be prepared for some exciting racing at Spruce General Membership Run with New Jersey's best! Meeting Derek Stow writes that the spring season for Laser frostbit- ing begins on March 12 at the Cedar Point Yacht Club in When: Sunday, March 26 at 1:00 PM Westport, Connecticut. Following that is a regatta at Cedar NOTE (12:00 to 1:00 is the early-bird hour for those Point on April 29. Don't forget the drysuit or wetsuit. For wishing to order lunch and/or talk sailing) details go to www.cedarpointyc.org. Where: Sunset Inn, Clinton NJ Although it's been a quiet winter for Laser sailors around West side of Route 31, about 2 miles North of I-78) here, the Winter 2006 edition of The Laser Sailor (published by the International Laser Class Association) just arrived, with lots of news about upcoming events. A Agenda sampling: Laser District 10 Championships at Surf City, June 17 and 18; Atlantic Coast Championships, July 15 and 16 at Sayville Yacht Club (New York); North Ameri- can Championships at St. Margaret's Bay, Nova Scotia, 1:00 Welcome July 20-23. 1:15 Election of Treasurer for the balance of 2006 Ned Jones from Laser builder Vanguard writes for The NOTE: Tom Maier after many years of wonder- Laser Sailor about the Laser: "The boat, the people, and the ful service has elected to apply for early retirement. -

Portsmouth Dinghy Race Results 2019.Xlsx
Series Scoring NOTE: NO INPUT THIS SHEET! Number Total Maximum Final Portsmouth Sunday 2019 Race 1 Race 2 Race 3 Race 4 Race 5 Race 6 Race 7 Race 8 Race 9 Race 10 Race 11 Race 12 Race 13 Race 14 Race 15 Race 16 Race 17 Race 18 Race 19 Race 20 Race 21 Race 22 Race 23 Race24 Races Race Race Series Name PLACE Boat/skipper Type Sail # 5/5/2019 5/5/2019 5/5/2019 6/30/2019 7/21/2019 7/21/2019 7/21/2019 8/11/2019 8/11/2019 8/11/2019 8/25/2019 8/25/2019 8/25/2019 9/15/2019 9/15/2019 9/15/2019 10/6/2019 10/6/2019 10/6/2019 10/6/2019 10/27/2019 10/27/2019 10/27/2019 10/27/2019 Points Points Points Steve Sherman MC Scow 1863 8 DNC DNC 7 7 DNC DNC DNC DNC DNC DNC 7 9 7 DNC DNC DNC DNC 333212566093.333 Steve Sherman 1 Josh Landers M14 704 DNC DNC DNC 7 DNC DNC DNC 5 5 5 28844454DNCDNCDNCDNC14616889.706 Josh Landers 2 Ed Craig M14 703 7 6 4 6 9 5 4 7 5 DNC DNC DNC DNC DNC DNC 3 4 3 DNC DNC DNC DNC 14 63 75 84.000 Ed Craig 3 Scott Cline Snipe 24093 6 DNC DNC 5 6 8 DNC 76644DNC67DNC3 222319779581.053 Scott Cline 4 Adam Ankers M14 520 DNC DNC DNC DNC 86465DNC323DNCDNCDNCDNCDNCDNCDNCDNCDNCDNCDNC8375172.549 Adam Ankers 5 Final Series Points: A boat's total race points Corey Blair M14524DNCDNCDNCDNC476 4DNCDNCDNC56DNC2232DNCDNCDNCDNC12416464.063 Corey Blair 6 divided by the maximum number of points Barry Klein M14 518 DNC DNC DNC DNC 3 2 5 DNC DNC DNC DNC DNC DNC 4 4 6 DNC DNC DNC DNC DNC DNC DNC DNC 6 24 48 50.000 Barry Klein 7 given if she had one every race she competed David Varnell MC Scow 1707 2 1 DNC 3 DNC DNC DNC DNC DNC DNC DNC DNC DNC 2 3 2 DNC DNC DNC DNC DNC DNC DNC DNC 6 13 45 28.889 David Varnell 8 in, multiplied by 100. -
Waterline-December-2020.Pdf
INSIDE: • Change of Watch, in Commodore’s Corner • Work Party Wrap-Up • Chartering, Final Article December 2020 KEOWEE SAILING CLUB Sunfish Saturdays by Phil Cook The 2020 Sunfish Saturday Series consisted of eighteen races, spanning three separate Saturdays. The competition was fierce, with six of the 13 different racers finishing first during the series. Rod Andrew took top honors finishing with an impressive record of four 1st place finishes, two 2nd place finishes, seven 3rd place finishes, three 4th place finishes, and with a lowest finish of 6th place. Way to go Marine! Rick Harper finished a close second place with eight 1st place finishes. Of note, Junior member Cole Owens finished fourth! Awesome Cole! Besting Grandpa and Dad has to feel good?! Special thanks to Kip Goodman for serving as PRO for all three events and to her support team on race committee; Roger Benedict, Jan Cook, Tim Owens and Robyn Strickland! As with the Thursday Night Series, I strongly encourage those members who are tentative about racing, to try the Sunfish Saturday Series. It’s a really great way to join the fun and excitement of KSC racing! Commodore’s Corner Change of Watch 2020 has been a year of challenges, but also a year which has nudged us toward putting our time and efforts to the important things in our lives. This year has revealed what a treasure we have in the Keowee Sailing Club. Due to Covid 19, we will not be holding a Change of Watch Ceremony this year and that has caused me to reflect on the leadership at KSC and the people I had the opportunity to work with this past year. -

Marijuana Business Licenses Approved
OREGON LIQUOR & CANNABIS COMMISSION Marijuana Business Licenses Approved as of 9/9/2021 Retail Medical LICENSE NUMBER LICENSEE NAME BUSINESS NAME LICENSE TYPE ACTIVE COUNTY Delivery Grade Hemp 050 100037147CC Hotbox Farms LLC Hotbox Farms Recreational Retailer Yes Baker Yes 050 10011127277 Scott, Inc 420VILLE Recreational Retailer Yes Baker 020 10017768FC7 Burnt River Farms, LLC Burnt River Farms LLC. Recreational Producer Yes Baker 030 10031846B25 Burnt River Farms, LLC Burnt River Farms LLC. Recreational Processor Yes Baker 060 1003692E356 Burnt River Farms, LLC Burnt River Farms LLC. Recreational Wholesaler Yes Baker 050 1003713A8A4 The Coughie Pot, LLC The Coughie Pot Recreational Retailer Yes Baker 050 10047883377 Sumpter Nugget, LLC Sumpter Nugget Recreational Retailer Yes Baker Yes 030 10071310CDB Nugget Candy Co, LLC Nugget Candy Co, LLC/Bad Rabbit Recreational Processor Yes Baker Yes Solventless 060 10079080A50 420BUNKERVILLE LLC 420 Bunkerville Recreational Wholesaler Yes Baker Yes 020 1007910A67C 420BUNKERVILLE LLC 420 Bunkerville Recreational Producer Yes Baker 020 1008998100D Burnt River Farms, LLC Burnt River Farms LLC Recreational Producer Yes Baker 060 1010135EC04 Hotbox Farms LLC Hotbox Farms Recreational Wholesaler Yes Baker 020 10104590FEE Bad Rabbit Farms LLC Bad Rabbit Farms LLC Recreational Producer Yes Baker 020 10001223B25 Fire Creek Farms LLC. Fire Creek Farms Recreational Producer Yes Benton 020 1000140D286 Bosmere Farms, Inc. Bosmere Farms, Inc. Recreational Producer Yes Benton 020 10004312ECD Grasshopper Farm, -

Over 500 New and Used Boats YOUR DISCOUNT SOURCE! the BRANDS YOU WANT and TRUST in STOCK for LESS
Volume XIX No. 5 June 2008 Over 500 New and Used Boats YOUR DISCOUNT SOURCE! THE BRANDS YOU WANT AND TRUST IN STOCK FOR LESS Volume discounts available. # Dock & Anchor Line # Largest Samson Dealer Samson Yacht Braid # Yacht Braid # in 49 States! for all Applications # Custom Splicing # • Apex • Ultra-Lite # HUGE Selection # An example of our buying power • XLS Yacht Braid • Warpspeed Most orders ship the Over Half a Million 3/8” XLS Yacht Braid • Trophy Braid • LS Yacht Braid same day! Feet in Stock for • Ultratech • XLS Solid Color Immediate Delivery! Only 78¢/foot • Amsteel • Tech 12 • XLS Extra Your Discount ® Defender Boating Supply FREE 324 page Source for Catalog! www.defender.com 800-628-8225 • [email protected] Over 70 Years! Boating, The Way It Should Be! Over 650,000 BoatU.S. Members know how to stretch their boating dollars and get more out of boating. With access to discounts on boating equipment, time-saving services, information on boating safety and over 26 other benefits, our Members know it pays to belong! U Low-cost towing services and boat insurance U Subscription to BoatU.S. Magazine U Discounts on fuel, repairs and more at marinas nationwide U Earn a $10 reward certificate for every $250 spent at West Marine Stores With a BoatU.S. Membership, You Can Have it All! Call 800-395-2628 or visit BoatUS.com Mention Priority Code MAFT4T Join today for a special offer of just $19—that’s 25% off! Simply Smart™ Lake Minnetonka’s ROW Lake Minnetonka’s Premier Sailboat Marina Limited Slips Still Available! SAIL MOTOR Ask About Spring Get more fun from your tender. -

Crew-Z-Ing Raffle Winners a Flying Scot Down Under
Volume 64 x Number 3 x 2020 CREW-Z-ING A FLYING SCOT DOWN UNDER RAFFLE WINNERS NORTH SAILS CLIENTS DOMINATE THE FLYING SCOT MIDWINTERS CHAMPIONSHIP DIVISION CHALLENGER DIVISION 1ST 2ND 3RD 1ST 3RD Congratulations Congratulations Jeff & Amy Linton Karen Jones & Chuck Tanner EXPERIENCE THE VALUE OF THE NORTH DIFFERENCE ONE-YEAR ELITE CLASS 160+ LOFTS FREE SAIL CARE EXPERTS AROUND THE WORLD Zeke Horowitz Brian Hayes 941-232-3984 [email protected] 203-783-4238 [email protected] photo credit - Jim Faugust northsails.com CONTENTS OFFICIAL PUBLICATION OF THE FLYING SCOT® SAILING ASSOCIATION x x Flying Scot® Sailing Association Volume 64 Number 3 2020 One Windsor Cove,Suite 305, Columbia, S.C. 29223 Email: [email protected] 803-252-5646 • 1-800-445-8629 FAX (803) 765-0860 Courtney LC Waldrup, Executive Secretary President’s Message ......................................................4 PRESIDENT Bill Dunham* Our Designer Inducted Into Sailing 700 Route 22 Trinity-Pawling Pawling, NY 12564 Hall Of Fame - Finally ...................................................5 845-855-0619 • [email protected] FIRST VICE-PRESIDENT FSSA Raffle Captures the Attention of Nancy L. Claypool* 712 Constantinople Street Flying Scot Sailors ........................................................8 New Orleans, LA 70115 504-251-3926 • [email protected] Crew-Z-ing .................................................................10 SECOND VICE-PRESIDENT James A. Leggette* 106 Dover Court A Flying Scot Down Under ............................................14 -

The Phantom Menace: the F-4 in Air Combat in Vietnam
THE PHANTOM MENACE: THE F-4 IN AIR COMBAT IN VIETNAM Michael W. Hankins Thesis Prepared for the Degree of MASTER OF SCIENCE UNIVERSITY OF NORTH TEXAS August 2013 APPROVED: Robert Citino, Major Professor Michael Leggiere, Committee Member Christopher Fuhrmann, Committee Member Richard McCaslin, Chair of the Department of History Mark Wardell, Dean of the Toulouse Graduate School Hankins, Michael W. The Phantom Menace: The F-4 in Air Combat in Vietnam. Master of Science (History), August 2013, 161 pp., 2 illustrations, bibliography, 84 titles. The F-4 Phantom II was the United States' primary air superiority fighter aircraft during the Vietnam War. This airplane epitomized American airpower doctrine during the early Cold War, which diminished the role of air-to-air combat and the air superiority mission. As a result, the F-4 struggled against the Soviet MiG fighters used by the North Vietnamese Air Force. By the end of the Rolling Thunder bombing campaign in 1968, the Phantom traded kills with MiGs at a nearly one-to-one ratio, the worst air combat performance in American history. The aircraft also regularly failed to protect American bombing formations from MiG attacks. A bombing halt from 1968 to 1972 provided a chance for American planners to evaluate their performance and make changes. The Navy began training pilots specifically for air combat, creating the Navy Fighter Weapons School known as "Top Gun" for this purpose. The Air Force instead focused on technological innovation and upgrades to their equipment. The resumption of bombing and air combat in the 1972 Linebacker campaigns proved that the Navy's training practices were effective, while the Air Force's technology changes were not, with kill ratios becoming worse. -
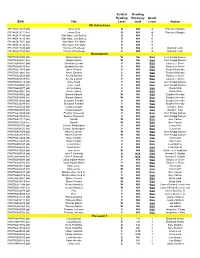
Dk Education Readinglevels Gui
Guided Reading Reading Recovery Grade ISBN Title Level level Level Author DK Adventures 9781465417237 (pb) Horse Club Q N/A 4 Patricia J Murphy 9781465418111 (hc) Horse Club Q N/A 4 Patricia J Murphy 9781465417244 (pb) Star Wars: Jedi Battles U N/A 5 9781465418135 (hc) Star Wars: Jedi Battles U N/A 5 9781465417251 (pb) Star Wars: Sith Wars U N/A 5 9781465418142 (hc) Star Wars: Sith Wars U N/A 5 9781465417220 (pb) Terrors of the Deep S N/A 4 Deborah Lock 9781465418128 (hc) Terrors of the Deep S N/A 4 Deborah Lock Biographies 9780756652098 (pb) Abigail Adams W NA 5&6 Kem Knapp Sawyer 9780756652081 (hc) Abigail Adams W NA 5&6 Kem Knapp Sawyer 9780756608347 (pb) Abraham Lincoln V N/A 5&6 Tanya Lee Stone 9780756608330 (hc) Abraham Lincoln V N/A 5&6 Tanya Lee Stone 9780756612470 (pb) Albert Einstein V N/A 5&6 Frieda Wishinsky 9780756612481 (hc) Albert Einstein V N/A 5&6 Frieda Wishinsky 9780756625528 (pb) Amelia Earhart V N/A 5&6 Tanya Lee Stone 9780756625535 (hc) Amelia Earhart V N/A 5&6 Tanya Lee Stone 9780756603410 (pb) Anne Frank V N/A 5&6 Kem Knapp Sawyer 9780756604905 (hc) Anne Frank V N/A 5&6 Kem Knapp Sawyer 9780756629977 (pb) Annie Oakley V N/A 5&6 Chuck Wills 9780756629861 (hc) Annie Oakley V N/A 5&6 Chuck Wills 9780756658052 (pb) Barack Obama W NA 5&6 Stephen Krensky 9780756658045 (hc) Barack Obama W NA 5&6 Stephen Krensky 9780756635282 (pb) Benjamin Franklin V N/A 5&6 Stephen Krensky 9780756635299 (hc) Benjamin Franklin V N/A 5&6 Stephen Krensky 9780756625542 (pb) Charles Darwin W N/A 5&6 David C.