Lecture Notes of Antennas
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

"Eggbeater"Antenna Vhf/Uhf ~ Part 1
"EGGBEATER"ANTENNA VHF/UHF ~ PART 1 ON6WG / F5VIF For the enthusiastic listeners or the licensed amateur station wishing to experiment with satellite transmissions without investing a large sum of money in rotators and tracking systems, here is a very competitive antenna. It will appeal to those with no space for large arrays, or for those who simply wish to experiment with circular polarization for terrestrial transmissions. Introduction This antenna was conceived mainly for high-speed digital transmission via satellite. Another reason was the need for a compact system due to the local environment of my station (mountainous region with high hills and obstacles too close to my station, no space to safely place rotative YAGI antennas). If the horizon is unreachable for RF signals , that leaves only the sky above us. To use the high-speed digital satellites, the level of signal reaching the TNC must be high enough to correctly decode the packets. For example, I mainly use an AEA/PK-96 TNC which requires at least 200 millivolts p-p at the input. To have this level when receiving 9600 Bd packets, there must be at least an S-3 showing on the S-Meter of my receiver. Design The antenna is made of two full waves loops , mounted at right angles to each other. Then coupled together, 90 degrees out of phase over a horizontal circular reflector. With this configuration the antenna is omni directional and circularly polarized. Changing the feeder connection from one loop to the other loop will effectively change the polarization between RHCP and LHCP. -

Analysis of Crossed Dipole to Obtain Circular Polarization Applying Characteristic Modes Techniques
Analysis of crossed dipole to obtain circular polarization applying Characteristic Modes techniques Juan Pablo Ciafardini (1), Eva Antonino Daviu (2), Marta Cabedo Fabrés (2), Nora Mohamed Mohamed-Hicho (2), José Alberto Bava (1), Miguel Ferrando Bataller (2). (1) Dpto. de Electrotecnia. Facultad de Ingeniería, Universidad Nacional de La Plata. Calle 48 y 116 - La Plata (1900), Argentina. [email protected] (2) Instituto de Telecomunicaciones y Aplicaciones Multimedia. Edificio 8G. Planta 4ª, acceso D. Universidad Politécnica Valencia. Camino de Vera, s/n46022 Valencia. España. [email protected] Abstract— The crossed dipole is a common type of antenna developed to achieve wider bandwidth impedance compared that is used to generate circularly polarized radiation in a wide to the original design. In 1961 a new type of crossed dipole frequency range. This antenna was originally developed in the antenna, which used a single feed, was developed for 1930s and today is used in many wireless communication circular polarization radiation [5], Bolster demonstrated systems, including broadcast services, satellite theoretically and experimentally that single-feed crossed communications, mobile communications, global navigation systems satellite system (GNSS), radio frequency identification dipoles connected in parallel if the lengths of the dipoles (RFID), wireless local area networks (WLANs) and global were such that the real parts of their input admittances were interoperability for microwave access (WiMAX). equal and the phase angles of their input admittances This paper shows that it is possible to obtain circular differed by 90º. Based on these conditions, numerous polarization with two cross dipoles with different lengths and single-feed circularly polarized crossed dipole antennas connected in parallel by applying the Theory of Characteristic have been designed [5] - [25]. -

2019 IEEE International Symposium on Antennas and Propagation and USNC-URSI National Radio Science Meeting
2019 IEEE International Symposium on Antennas and Propagation and USNC-URSI National Radio Science Meeting Final Program 7–12 July 2019 Hilton Atlanta Atlanta, Georgia, U.S.A. Conference at a Glance Saturday, July 6 14:00-16:00 Strategic Planning Committee 16:15-17:15 AP-S Meetings Committee 17:15-18:15 JMC Meeting (Closed Session) 18:15-21:30 JMC Meeting, Dinner and Presentations 19:15-21:15 IEEE AP-S Constitution and Bylaws Committee Meeting & Dinner Sunday, July 7 08:00-10:00 Past Presidents’ Breakfast 10:00-18:00 AdCom Meeting 19:30-22:00 Welcome Dessert Reception at the Georgia Aquarium Monday, July 8 07:00-08:00 Amateur Radio Operators Breakfast 08:00-11:40 Technical Sessions 09:00-18:00 Technical Tour - “An Engineer’s Eye View” of the Mercedes Benz Stadium 12:00-13:20 Transactions on Antennas and Propagation Editorial Board Lunch Meeting 13:20-17:00 Technical Sessions 17:00-18:00 URSI Commission A Business Meeting 17:00-18:00 URSI Commission B Business Meeting 17:00-18:00 URSI Commissions C/E (combined) Business Meeting Tuesday, July 9 07:00-08:00 AP Magazine Staff Meeting 07:00-08:00 APS 2020 Committee Meeting 07:00-08:00 Industrial Initiatives 07:00-08:00 Membership Committee Meeting 07:00-08:00 Student Design Contest (Set-Up - Closed to Others) 07:00-08:00 Technical Committee on Antenna Measurement 08:00-11:40 Student Paper Competition 08:00-11:40 Technical Sessions 08:00-09:30 Student Design Contest (Demo for Judges - Closed to Others) 08:30-14:00 Standards Committee Meeting 09:30-12:00 Student Design Contest (Demo for Public) -

Various Types of Antenna with Respect to Their Applications: a Review
INTERNATIONAL JOURNAL OF MULTIDISCIPLINARY SCIENCES AND ENGINEERING, VOL. 7, NO. 3, MARCH 2016 Various Types of Antenna with Respect to their Applications: A Review Abdul Qadir Khan1, Muhammad Riaz2 and Anas Bilal3 1,2,3School of Information Technology, The University of Lahore, Islamabad Campus [email protected], [email protected], [email protected] Abstract– Antenna is the most important part in wireless point to point communication where increase gain and communication systems. Antenna transforms electrical signals lessened wave impedance are required [45]. into radio waves and vice versa. The antennas are of various As the knowledge about antennas along with its application kinds and having different characteristics according to the need is particularly less thus this review is essential for determining of signal transmission and reception. In this paper, we present various antennas and their applications in different systems. comparative analysis of various types of antennas that can be differentiated with respect to their shapes, material used, signal In this paper a detailed review of various types of antenna bandwidth, transmission range etc. Our main focus is to classify which developed to perform useful task of communication in these antennas according to their applications. As in the modern different field of communication network is presented. era antennas are the basic prerequisites for wireless communications that is required for fast and efficient II. WIRE ANTENNA communications. This paper will help the design architect to choose proper antenna for the desired application. A. Biconical Dipole Antenna Keywords– Antenna, Communications, Applications and Signal There is no restriction to the data transfer capacity of an Transmission infinite constant-impedance transmission line however any pragmatic execution of the biconical dipole has appendages of constrained extend forming an open-circuit stub in the same I. -

Here's a Quick Way to Know About Different Types of Antennas
11/28/2016 Different types of Antennas with Properties and thier Working HOME PROJECT IDEAS › POPULAR PROJECTS › ELECTRICAL › ELECTRONICS B.TECH PROJECTS Expert Outreach Communication Giveaways IC › Infographics Projects › Here’s a Quick Way to Know about Different Types of Antennas by Tarun Agarwal | at COMMUNICATION China Prototype PCB: 2 Register to get 10pcs for Free 4 days shipping. Register 10pcs Free now! In this modern era of wireless communication, many engineers are showing interest to do specialization in communication fields, but this requires basic knowledge of fundamental communication concepts such as types of antennas, electromagnetic radiation and various phenomena related to propagation, etc. In case of wireless communication systems, antennas play a prominent role as they convert the electronic signals into electromagnetic waves efficiently. Ads by Google Antenna Design Patch Antenna Types of Antennas https://www.elprocus.com/differenttypesofantennaswithpropertiesandthierworking/ 1/13 11/28/2016 Different types of Antennas with Properties and thier Working Antennas are basic components of any electrical circuit as they provide interconnecting links between transmitter and free space or between free space and receiver. Before we discuss about antenna types, there are a few properties that need to be understood. Apart from these properties, we also cover about different types of antennas used in communication system in detail. Properties of Antennas Antenna Gain Aperture Directivity and bandwidth Polarization Effective length Polar diagram Antenna Gain: The parameter that measures the degree of directivity of antenna’s radial pattern is known as gain. An antenna with a higher gain is more effective in its radiation pattern. -

Lecture 28 Different Types of Antennas–Heuristics
Lecture 28 Different Types of Antennas{Heuristics 28.1 Types of Antennas There are different types of antennas for different applications [128]. We will discuss their functions heuristically in the following discussions. 28.1.1 Resonance Tunneling in Antenna A simple antenna like a short dipole behaves like a Hertzian dipole with an effective length. A short dipole has an input impedance resembling that of a capacitor. Hence, it is difficult to drive current into the antenna unless other elements are added. Hertz used two metallic spheres to increase the current flow. When a large current flows on the stem of the Hertzian dipole, the stem starts to act like inductor. Thus, the end cap capacitances and the stem inductance together can act like a resonator enhancing the current flow on the antenna. Some antennas are deliberately built to resonate with its structure to enhance its radiation. A half-wave dipole is such an antenna as shown in Figure 28.1 [124]. One can think that these antennas are using resonance tunneling to enhance their radiation efficiencies. A half-wave dipole can also be thought of as a flared open transmission line in order to make it radiate. It can be gradually morphed from a quarter-wavelength transmission line as shown in Figure 28.1. A transmission is a poor radiator, because the electromagnetic energy is trapped between two pieces of metal. But a flared transmission line can radiate its field to free space. The dipole antenna, though a simple device, has been extensively studied by King [129]. He has reputed to have produced over 100 PhD students studying the dipole antenna. -
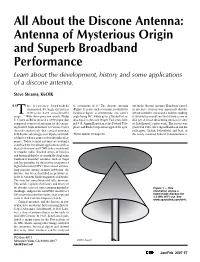
All About the Discone Antenna: Antenna of Mysterious Origin And
All About the Discone Antenna: Antenna of Mysterious Origin and Superb Broadband Performance Learn about the development, history and some applications of a discone antenna. Steve Stearns, K6OIK he frequency bandwidths as extensions of it.1 The discone antenna ent on the discone antenna. Kandoian’s novel “ demanded by high-definition (Figure 1) is one such extension, in which the or inventive element was apparently that the T television have considerable biconical dipole is asymmetric, one cone’s antenna could be encased in a radome, making range…” With these prescient words, Philip angle being 90°, which gives a flat disk of ra- it suitable for aircraft, not that it used a cone or S. Carter of RCA opened a 1939 paper that dius equal to the cone length. Two years later, disk per se, those ideas being obvious in view compared a variety of antennas for the emerg- in 1943, Armig Kandoian at the Federal Tele- of Schelkunoff’s prior work. The patent was ing field of “high-definition” television. Carter phone and Radio Corporation applied for a pat- granted in 1945, whereupon Kandoian and his showed conclusively that conical antennas colleagues, Sichak, Felsenheld, and Nail, at held distinct advantages over dipoles and fold- 1Notes appear on page 43. the newly renamed Federal Telecommunica- ed dipoles when it comes to broadband perfor- mance. Today, conical antennas are making a comeback for broadband applications such as digital television and UWB (ultra-wideband) or impulse radio. Stacked arrays of bowties and biconical dipoles are gradually displacing traditional mainstay antennas such as Yagis and log-periodics for the rooftop reception of digital television (DTV). -

Crossed Dipole Antennas: a Review
See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/282776048 Crossed Dipole Antennas: A review Article in IEEE Antennas and Propagation Magazine · October 2015 DOI: 10.1109/MAP.2015.2470680 CITATIONS READS 32 7,482 3 authors: Son Xuat Ta Ikmo Park VNU University of Science Ajou University 78 PUBLICATIONS 642 CITATIONS 187 PUBLICATIONS 2,123 CITATIONS SEE PROFILE SEE PROFILE R.W. Ziolkowski The University of Arizona 562 PUBLICATIONS 12,913 CITATIONS SEE PROFILE Some of the authors of this publication are also working on these related projects: Artificial Metamaterials View project Metasurface-Inspired Antennas View project All content following this page was uploaded by Son Xuat Ta on 16 November 2015. The user has requested enhancement of the downloaded file. Son Xuat Ta, Ikmo Park, and Richard W. Ziolkowski Crossed Dipole Antennas A review. rossed dipole antennas have been THE HISTORY OF CROSSED widely developed for current and DIPOLE ANTENNAS future wireless communication sys- The crossed dipole is a common type of mod- tems. They can generate isotropic, ern antenna with an radio frequency (RF)- Comnidirectional, dual-polarized (DP), and to millimeter-wave frequency range. The circularly polarized (CP) radiation. More- crossed dipole antenna has a fairly rich and over, by incorporating a variety of primary interesting history that started in the 1930s. radiation elements, they are suitable for The first crossed dipole antenna was devel- single-band, multiband, and wideband oper- oped under the name “turnstile antenna” ations. This article presents a review of the by Brown [1]. In the 1940s, “superturnstile” designs, characteristics, and applications antennas [2]–[4] were developed for a broader of crossed dipole antennas along with the impedance bandwidth in comparison with recent developments of single-feed CP con- the original design. -
Amplifiers, Sequencing, Phasing Lines, Noise Problems Tom Haddon, K5VH and New Modes of Operation
PROCEEDINGS of the 48th Conference of the July 24-27 Austin, Texas 2014 Published by: ® i Copyright © 2014 by The American Radio Relay League Copyright secured under the Pan-American Convention. International Copyright secured. All rights reserved. No part of this work may be reproduced in any form except by written permission of the publisher. All rights of translation reserved. Printed in USA. Quedan reservados todos los derechos. First Edition ii CENTRAL STATES VHF SOCIETY 48th Annual Conference, July 24 - 27, 2014 Austin, Texas http://www.csvhfs.org President: Steve Hicks, N5AC Fellow members and guests of the Central States VHF Society, Vice President: Dick Hanson, K5AND In 2004, a friend invited me to attend an amateur radio conference Website: much like this one, and that conference forever changed the way I Bob Hillard, WA6UFQ looked at amateur radio. I was really amazed at the number of people and the amount of technology that had come together in Antenna Range: Kent Britain, WA5VJB one place! Before the end of the conference, I had approached Marc Thorson, WB0TEM one of the vendors and boldly said that I wanted to get on 222- Rover/Dish Displays: 2304. Jim Froemke, K0MHC Facilities: As others have pointed out in the past, one of the real values of Lori Hicks attendance is getting to know other died-in-the-wool VHF’ers. Yes, Family Program: the Proceedings is a great resource tool, but it is hard to overstate Lori Hicks the value of the one on one time with the real pros at one of these Technical Program: conferences. -

New Trends in Energy Harvesting from Earth Long-Wave Infrared Emission
Hindawi Publishing Corporation Advances in Materials Science and Engineering Volume 2014, Article ID 252879, 10 pages http://dx.doi.org/10.1155/2014/252879 Review Article New Trends in Energy Harvesting from Earth Long-Wave Infrared Emission Luciano Mescia1 and Alessandro Massaro2 1 Dipartimento di Ingegneria Elettrica e dell’Informazione (DEI), Politecnico di Bari, Via E. Orabona 4, 70125 Bari, Italy 2 Istituto Italiano di Tecnologia (IIT), Center for Biomolecurar Nanotechnologies (CBN), Via Barsanti, 73010 Arnesano, Italy Correspondence should be addressed to Luciano Mescia; [email protected] Received 12 June 2014; Accepted 18 July 2014; Published 11 August 2014 Academic Editor: Andrea Chiappini Copyright © 2014 L. Mescia and A. Massaro. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. A review, even if not exhaustive, on the current technologies able to harvest energy from Earth’s thermal infrared emission is reported. In particular, we discuss the role of the rectenna system on transforming the thermal energy, provided by the Sun and reemitted from the Earth, in electricity. The operating principles, efficiency limits, system design considerations, and possible technological implementations are illustrated. Peculiar features of THz and IR antennas, such as physical properties and antenna parameters, are provided. Moreover, some design guidelines for isolated antenna, rectifying diode, and antenna coupled to rectifying diode are exploited. 1. Introduction power generation without increasing environmental pollu- tion [3]. Duringthelast20years,theworldwideenergydemandshave Photovoltaic (PV) conversion is the direct conversion of been strongly increased and as a consequence the deleterious sunlight into electricity without any heat engine to interfere. -

Principles of Radiation and Antennas
RaoCh10v3.qxd 12/18/03 5:39 PM Page 675 CHAPTER 10 Principles of Radiation and Antennas In Chapters 3, 4, 6, 7, 8, and 9, we studied the principles and applications of prop- agation and transmission of electromagnetic waves. The remaining important topic pertinent to electromagnetic wave phenomena is radiation of electromag- netic waves. We have, in fact, touched on the principle of radiation of electro- magnetic waves in Chapter 3 when we derived the electromagnetic field due to the infinite plane sheet of time-varying, spatially uniform current density. We learned that the current sheet gives rise to uniform plane waves radiating away from the sheet to either side of it. We pointed out at that time that the infinite plane current sheet is, however, an idealized, hypothetical source. With the ex- perience gained thus far in our study of the elements of engineering electro- magnetics, we are now in a position to learn the principles of radiation from physical antennas, which is our goal in this chapter. We begin the chapter with the derivation of the electromagnetic field due to an elemental wire antenna, known as the Hertzian dipole. After studying the radiation characteristics of the Hertzian dipole, we consider the example of a half-wave dipole to illustrate the use of superposition to represent an arbitrary wire antenna as a series of Hertzian dipoles to determine its radiation fields.We also discuss the principles of arrays of physical antennas and the concept of image antennas to take into account ground effects. Next we study radiation from aperture antennas. -

Biconical Antenna
Biconical Antenna AB-900A Features • Frequency Range 25 MHz to 300 MHz • Transmit & Receive Capabilities emissions/immunity applications • Individual Calibration Included per ANSI C63.5 or SAE ARP958 with NIST traceability • Three-year Standard Warranty Description Application The AB-900A is a broadband, linearly polarized Biconical The AB-900A Biconical Antenna is intended for use as Dipole Antenna, operating over the frequency range of an EMI test antenna for qualification-level regulatory 25 MHz to 300 MHz. It can be used as either a receiving compliance measurements (FCC, CE, MIL-STD-461, RTCA antenna (for EMI measurements) or as a transmitting DO-160, FDA, SAE Automotive, etc.). antenna (for immunity tests) for power levels up to 50 The AB-900A can also be used in conjunction with an RF watts. power amplifier (up to 50 watts) to generate RF fields associated with radiated immunity testing. Construction In addition, a pair of AB-900A Biconical Antennas can The antenna elements are constructed using a also be used for Normalized Site Attenuation (NSA) corrosion resistant aluminum, which is powder coated calibrations of Open Area Test Sites (OATS) or Semi- for additional durability. Implemented in the element Anechoic Chambers (SAC) using the Geometry Specific design is a “gamma match” rod, which connects the Correction Factors (GSCF) given in Tables G.1 through element’s center rod to one of the outer elements at G.3 of ANSI C63.5, as its physical dimensions conform to the inside edge of the 90 degree bend. The gamma the minimum and maximum values given in Figure G.1 match is necessary in order to avoid a significant “dip” in of ANSI C63.5 (Dimensions of biconical dipole antennas the antenna’s performance which would otherwise be evaluated for numerical correction).