A Coriolis Tutorial, Part 2
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Well-Balanced Schemes for the Shallow Water Equations with Coriolis Forces
Well-balanced schemes for the shallow water equations with Coriolis forces Alina Chertock, Michael Dudzinski, Alexander Kurganov & Mária Lukáčová- Medvid’ová Numerische Mathematik ISSN 0029-599X Volume 138 Number 4 Numer. Math. (2018) 138:939-973 DOI 10.1007/s00211-017-0928-0 1 23 Your article is protected by copyright and all rights are held exclusively by Springer- Verlag GmbH Germany, part of Springer Nature. This e-offprint is for personal use only and shall not be self-archived in electronic repositories. If you wish to self-archive your article, please use the accepted manuscript version for posting on your own website. You may further deposit the accepted manuscript version in any repository, provided it is only made publicly available 12 months after official publication or later and provided acknowledgement is given to the original source of publication and a link is inserted to the published article on Springer's website. The link must be accompanied by the following text: "The final publication is available at link.springer.com”. 1 23 Author's personal copy Numer. Math. (2018) 138:939–973 Numerische https://doi.org/10.1007/s00211-017-0928-0 Mathematik Well-balanced schemes for the shallow water equations with Coriolis forces Alina Chertock1 · Michael Dudzinski2 · Alexander Kurganov3,4 · Mária Lukáˇcová-Medvid’ová5 Received: 28 April 2014 / Revised: 19 September 2017 / Published online: 2 December 2017 © Springer-Verlag GmbH Germany, part of Springer Nature 2017 Abstract In the present paper we study shallow water equations with bottom topog- raphy and Coriolis forces. The latter yield non-local potential operators that need to be taken into account in order to derive a well-balanced numerical scheme. -
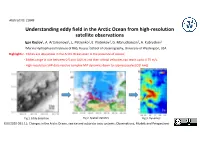
Understanding Eddy Field in the Arctic Ocean from High-Resolution Satellite Observations Igor Kozlov1, A
Abstract ID: 21849 Understanding eddy field in the Arctic Ocean from high-resolution satellite observations Igor Kozlov1, A. Artamonova1, L. Petrenko1, E. Plotnikov1, G. Manucharyan2, A. Kubryakov1 1Marine Hydrophysical Institute of RAS, Russia; 2School of Oceanography, University of Washington, USA Highlights: - Eddies are ubiquitous in the Arctic Ocean even in the presence of sea ice; - Eddies range in size between 0.5 and 100 km and their orbital velocities can reach up to 0.75 m/s. - High-resolution SAR data resolve complex MIZ dynamics down to submesoscales [O(1 km)]. Fig 1. Eddy detection Fig 2. Spatial statistics Fig 3. Dynamics EGU2020 OS1.11: Changes in the Arctic Ocean, sea ice and subarctic seas systems: Observations, Models and Perspectives 1 Abstract ID: 21849 Motivation • The Arctic Ocean is a host to major ocean circulation systems, many of which generate eddies transporting water masses and tracers over long distances from their formation sites. • Comprehensive observations of eddy characteristics are currently not available and are limited to spatially and temporally sparse in situ observations. • Relatively small Rossby radii of just 2-10 km in the Arctic Ocean (Nurser and Bacon, 2014) also mean that most of the state-of-art hydrodynamic models are not eddy-resolving • The aim of this study is therefore to fill existing gaps in eddy observations in the Arctic Ocean. • To address it, we use high-resolution spaceborne SAR measurements to detect eddies over the ice-free regions and in the marginal ice zones (MIZ). EGU20 -OS1.11 – Kozlov et al., Understanding eddy field in the Arctic Ocean from high-resolution satellite observations 2 Abstract ID: 21849 Methods • We use multi-mission high-resolution spaceborne synthetic aperture radar (SAR) data to detect eddies over open ocean and marginal ice zones (MIZ) of Fram Strait and Beaufort Gyre regions. -
The General Circulation of the Atmosphere and Climate Change
12.812: THE GENERAL CIRCULATION OF THE ATMOSPHERE AND CLIMATE CHANGE Paul O'Gorman April 9, 2010 Contents 1 Introduction 7 1.1 Lorenz's view . 7 1.2 The general circulation: 1735 (Hadley) . 7 1.3 The general circulation: 1857 (Thompson) . 7 1.4 The general circulation: 1980-2001 (ERA40) . 7 1.5 The general circulation: recent trends (1980-2005) . 8 1.6 Course aim . 8 2 Some mathematical machinery 9 2.1 Transient and Stationary eddies . 9 2.2 The Dynamical Equations . 12 2.2.1 Coordinates . 12 2.2.2 Continuity equation . 12 2.2.3 Momentum equations (in p coordinates) . 13 2.2.4 Thermodynamic equation . 14 2.2.5 Water vapor . 14 1 Contents 3 Observed mean state of the atmosphere 15 3.1 Mass . 15 3.1.1 Geopotential height at 1000 hPa . 15 3.1.2 Zonal mean SLP . 17 3.1.3 Seasonal cycle of mass . 17 3.2 Thermal structure . 18 3.2.1 Insolation: daily-mean and TOA . 18 3.2.2 Surface air temperature . 18 3.2.3 Latitude-σ plots of temperature . 18 3.2.4 Potential temperature . 21 3.2.5 Static stability . 21 3.2.6 Effects of moisture . 24 3.2.7 Moist static stability . 24 3.2.8 Meridional temperature gradient . 25 3.2.9 Temperature variability . 26 3.2.10 Theories for the thermal structure . 26 3.3 Mean state of the circulation . 26 3.3.1 Surface winds and geopotential height . 27 3.3.2 Upper-level flow . 27 3.3.3 200 hPa u (CDC) . -

Symmetric Instability in the Gulf Stream
Symmetric instability in the Gulf Stream a, b c d Leif N. Thomas ⇤, John R. Taylor ,Ra↵aeleFerrari, Terrence M. Joyce aDepartment of Environmental Earth System Science,Stanford University bDepartment of Applied Mathematics and Theoretical Physics, University of Cambridge cEarth, Atmospheric and Planetary Sciences, Massachusetts Institute of Technology dDepartment of Physical Oceanography, Woods Hole Institution of Oceanography Abstract Analyses of wintertime surveys of the Gulf Stream (GS) conducted as part of the CLIvar MOde water Dynamic Experiment (CLIMODE) reveal that water with negative potential vorticity (PV) is commonly found within the surface boundary layer (SBL) of the current. The lowest values of PV are found within the North Wall of the GS on the isopycnal layer occupied by Eighteen Degree Water, suggesting that processes within the GS may con- tribute to the formation of this low-PV water mass. In spite of large heat loss, the generation of negative PV was primarily attributable to cross-front advection of dense water over light by Ekman flow driven by winds with a down-front component. Beneath a critical depth, the SBL was stably strat- ified yet the PV remained negative due to the strong baroclinicity of the current, suggesting that the flow was symmetrically unstable. A large eddy simulation configured with forcing and flow parameters based on the obser- vations confirms that the observed structure of the SBL is consistent with the dynamics of symmetric instability (SI) forced by wind and surface cooling. The simulation shows that both strong turbulence and vertical gradients in density, momentum, and tracers coexist in the SBL of symmetrically unstable fronts. -

Part II-1 Water Wave Mechanics
Chapter 1 EM 1110-2-1100 WATER WAVE MECHANICS (Part II) 1 August 2008 (Change 2) Table of Contents Page II-1-1. Introduction ............................................................II-1-1 II-1-2. Regular Waves .........................................................II-1-3 a. Introduction ...........................................................II-1-3 b. Definition of wave parameters .............................................II-1-4 c. Linear wave theory ......................................................II-1-5 (1) Introduction .......................................................II-1-5 (2) Wave celerity, length, and period.......................................II-1-6 (3) The sinusoidal wave profile...........................................II-1-9 (4) Some useful functions ...............................................II-1-9 (5) Local fluid velocities and accelerations .................................II-1-12 (6) Water particle displacements .........................................II-1-13 (7) Subsurface pressure ................................................II-1-21 (8) Group velocity ....................................................II-1-22 (9) Wave energy and power.............................................II-1-26 (10)Summary of linear wave theory.......................................II-1-29 d. Nonlinear wave theories .................................................II-1-30 (1) Introduction ......................................................II-1-30 (2) Stokes finite-amplitude wave theory ...................................II-1-32 -

Fluid Simulation Using Shallow Water Equation
Fluid Simulation using Shallow Water Equation Dhruv Kore Itika Gupta Undergraduate Student Graduate Student University of Illinois at Chicago University of Illinois at Chicago [email protected] [email protected] 847-345-9745 312-478-0764 ABSTRACT rivers and channel. As the name suggest, the main In this paper, we present a technique, which shows how characteristic of shallow Water flows is that the vertical waves once generated from a small drop continue to ripple. dimension is much smaller as compared to the horizontal Waves interact with each other and on collision change the dimension. Naïve Stroke Equation defines the motion of form and direction. Once the waves strike the boundary, fluids and from these equations we derive SWE. they return with the same speed and in sometime, depending on the delay, you can see continuous ripples in In Next section we talk about the related works under the the surface. We use shallow water equation to achieve the heading Literature Review. Then we will explain the desired output. framework and other concepts necessary to understand the SWE and wave equation. In the section followed by it, we Author Keywords show the results achieved using our implementation. Then Naïve Stroke Equation; Shallow Water Equation; Fluid finally we talk about conclusion and future work. Simulation; WebGL; Quadratic function. LITERATURE REVIEW INTRODUCTION In [2] author in detail explains the Shallow water equation In early years of fluid simulation, procedural surface with its derivation. Since then a lot of authors has used generation was used to represent waves as presented by SWE to present the formation of waves in water. -

Ocean and Climate
Ocean currents II Wind-water interaction and drag forces Ekman transport, circular and geostrophic flow General ocean flow pattern Wind-Water surface interaction Water motion at the surface of the ocean (mixed layer) is driven by wind effects. Friction causes drag effects on the water, transferring momentum from the atmospheric winds to the ocean surface water. The drag force Wind generates vertical and horizontal motion in the water, triggering convective motion, causing turbulent mixing down to about 100m depth, which defines the isothermal mixed layer. The drag force FD on the water depends on wind velocity v: 2 FD CD Aa v CD drag coefficient dimensionless factor for wind water interaction CD 0.002, A cross sectional area depending on surface roughness, and particularly the emergence of waves! Katsushika Hokusai: The Great Wave off Kanagawa The Beaufort Scale is an empirical measure describing wind speed based on the observed sea conditions (1 knot = 0.514 m/s = 1.85 km/h)! For land and city people Bft 6 Bft 7 Bft 8 Bft 9 Bft 10 Bft 11 Bft 12 m Conversion from scale to wind velocity: v 0.836 B3/ 2 s A strong breeze of B=6 corresponds to wind speed of v=39 to 49 km/h at which long waves begin to form and white foam crests become frequent. The drag force can be calculated to: kg km m F C A v2 1200 v 45 12.5 C 0.001 D D a a m3 h s D 2 kg 2 m 2 FD 0.0011200 Am 12.5 187.5 A N or FD A 187.5 N m m3 s For a strong gale (B=12), v=35 m/s, the drag stress on the water will be: 2 kg m 2 FD / A 0.00251200 35 3675 N m m3 s kg m 1200 v 35 C 0.0025 a m3 s D Ekman transport The frictional drag force of wind with velocity v or wind stress x generating a water velocity u, is balanced by the Coriolis force, but drag decreases with depth z. -

Shallow Water Waves and Solitary Waves Article Outline Glossary
Shallow Water Waves and Solitary Waves Willy Hereman Department of Mathematical and Computer Sciences, Colorado School of Mines, Golden, Colorado, USA Article Outline Glossary I. Definition of the Subject II. Introduction{Historical Perspective III. Completely Integrable Shallow Water Wave Equations IV. Shallow Water Wave Equations of Geophysical Fluid Dynamics V. Computation of Solitary Wave Solutions VI. Water Wave Experiments and Observations VII. Future Directions VIII. Bibliography Glossary Deep water A surface wave is said to be in deep water if its wavelength is much shorter than the local water depth. Internal wave A internal wave travels within the interior of a fluid. The maximum velocity and maximum amplitude occur within the fluid or at an internal boundary (interface). Internal waves depend on the density-stratification of the fluid. Shallow water A surface wave is said to be in shallow water if its wavelength is much larger than the local water depth. Shallow water waves Shallow water waves correspond to the flow at the free surface of a body of shallow water under the force of gravity, or to the flow below a horizontal pressure surface in a fluid. Shallow water wave equations Shallow water wave equations are a set of partial differential equations that describe shallow water waves. 1 Solitary wave A solitary wave is a localized gravity wave that maintains its coherence and, hence, its visi- bility through properties of nonlinear hydrodynamics. Solitary waves have finite amplitude and propagate with constant speed and constant shape. Soliton Solitons are solitary waves that have an elastic scattering property: they retain their shape and speed after colliding with each other. -

Shallow-Water Equations and Related Topics
CHAPTER 1 Shallow-Water Equations and Related Topics Didier Bresch UMR 5127 CNRS, LAMA, Universite´ de Savoie, 73376 Le Bourget-du-Lac, France Contents 1. Preface .................................................... 3 2. Introduction ................................................. 4 3. A friction shallow-water system ...................................... 5 3.1. Conservation of potential vorticity .................................. 5 3.2. The inviscid shallow-water equations ................................. 7 3.3. LERAY solutions ........................................... 11 3.3.1. A new mathematical entropy: The BD entropy ........................ 12 3.3.2. Weak solutions with drag terms ................................ 16 3.3.3. Forgetting drag terms – Stability ............................... 19 3.3.4. Bounded domains ....................................... 21 3.4. Strong solutions ............................................ 23 3.5. Other viscous terms in the literature ................................. 23 3.6. Low Froude number limits ...................................... 25 3.6.1. The quasi-geostrophic model ................................. 25 3.6.2. The lake equations ...................................... 34 3.7. An interesting open problem: Open sea boundary conditions .................... 41 3.8. Multi-level and multi-layers models ................................. 43 3.9. Friction shallow-water equations derivation ............................. 44 3.9.1. Formal derivation ....................................... 44 3.10. -
Waves in Water from Ripples to Tsunamis and to Rogue Waves
Waves in Water from ripples to tsunamis and to rogue waves Vera Mikyoung Hur (Mathematics) (Image from Flickr) The motion of a fluid can be very complicated as we know whenever we see waves break on a beach, (Image from the Internet) The motion of a fluid can be very complicated as we know whenever we fly in an airplane, (Image from the Internet) The motion of a fluid can be very complicated as we know whenever we look at a lake on a windy day. (Image from the Internet) Euler in the 1750s proposed a mathematical model of an incompressible fluid. @u + (u · r)u + rP = F, @t r · u = 0. Here, u(x; t) is the velocity of the fluid at the point x and time t, P(x; t) is the pressure, and F(x; t) is an outside force. The Navier-Stokes equations (adding ν∆u) allow the fluid to be viscous. It is concise and captures the essence of fluid behavior. The theory of fluids has provided source and inspiration to many branches of mathematics, e.g. Cauchy's complex function theory. Difficulties of understanding fluids are profound. e.g. the global-in-time solution of the Navier-Stokes equations in 3 dimensions is a Clay Millennium Problem! Waves, jets, drops come to mind when thinking of fluids. They involve one or more fluids separated by an unknown surface. In the mathematical community, they go by free boundary problems. (Image from the Internet) Free boundaries are mathematically challenging in their own right. They occur in many other situations, such as melting of ice stretching a membrane over an obstacle. -

Chapter 7 Balanced Flow
Chapter 7 Balanced flow In Chapter 6 we derived the equations that govern the evolution of the at- mosphere and ocean, setting our discussion on a sound theoretical footing. However, these equations describe myriad phenomena, many of which are not central to our discussion of the large-scale circulation of the atmosphere and ocean. In this chapter, therefore, we focus on a subset of possible motions known as ‘balanced flows’ which are relevant to the general circulation. We have already seen that large-scale flow in the atmosphere and ocean is hydrostatically balanced in the vertical in the sense that gravitational and pressure gradient forces balance one another, rather than inducing accelera- tions. It turns out that the atmosphere and ocean are also close to balance in the horizontal, in the sense that Coriolis forces are balanced by horizon- tal pressure gradients in what is known as ‘geostrophic motion’ – from the Greek: ‘geo’ for ‘earth’, ‘strophe’ for ‘turning’. In this Chapter we describe how the rather peculiar and counter-intuitive properties of the geostrophic motion of a homogeneous fluid are encapsulated in the ‘Taylor-Proudman theorem’ which expresses in mathematical form the ‘stiffness’ imparted to a fluid by rotation. This stiffness property will be repeatedly applied in later chapters to come to some understanding of the large-scale circulation of the atmosphere and ocean. We go on to discuss how the Taylor-Proudman theo- rem is modified in a fluid in which the density is not homogeneous but varies from place to place, deriving the ‘thermal wind equation’. Finally we dis- cuss so-called ‘ageostrophic flow’ motion, which is not in geostrophic balance but is modified by friction in regions where the atmosphere and ocean rubs against solid boundaries or at the atmosphere-ocean interface. -
Physical Oceanography and Circulation in the Gulf of Mexico
Physical Oceanography and Circulation in the Gulf of Mexico Ruoying He Dept. of Marine, Earth & Atmospheric Sciences Ocean Carbon and Biogeochemistry Scoping Workshop on Terrestrial and Coastal Carbon Fluxes in the Gulf of Mexico St. Petersburg, FL May 6-8, 2008 Adopted from Oey et al. (2005) Adopted from Morey et al. (2005) Averaged field of wind stress for the GOM. [adapted from Gutierrez de Velasco and Winant, 1996] Surface wind Monthly variability Spring transition vs Fall Transition Adopted from Morey et al. (2005) Outline 1. General circulation in the GOM 1.1. The loop current and Eddy Shedding 1.2. Upstream conditions 1.3. Anticyclonic flow in the central and northwestern Gulf 1.4. Cyclonic flow in the Bay of Campeche 1.5. Deep circulation in the Gulf 2. Coastal circulation 2.1. Coastal Circulation in the Eastern Gulf 2.2. Coastal Circulation in the Northern Gulf 2.3. Coastal Circulation in the Western Gulf 1. General Circulation in the GOM 1.1. The Loop Current (LC) and Eddy Shedding Eddy LC Summary statistics for the Loop Current metrics computed from the January1, 1993 through July 1, 2004 altimetric time series Leben (2005) A compilation of the 31-yr Record (July 1973 – June 2004) of LC separation event. The separation intervals vary From a few weeks up to ~ 18 Months. Separation intervals tend to Cluster near 4.5-7 and 11.5, And 17-18.5 months, perhaps Suggesting the possibility of ~ a 6 month duration between each cluster. Leben (2005); Schmitz et al. (2005) Sturges and Leben (1999) The question of why the LC and the shedding process behave in such a semi-erratic manner is a bit of a mystery • Hurlburt and Thompson (1980) found erratic eddy shedding intervals in the lowest eddy viscosity run in a sequence of numerical experiment.