1. Serial Port
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Series 90-70 Programmable Controller Data Sheet Manual, GFK-0600F
This Datasheet for the IC697CGR935 Hot Standby Genius Dual Bus CPU, 486DX4, 12K Discrete I/O, 1M byte fixed user memory, Floating Pt. http://www.cimtecautomation.com/parts/p-14765-ic697cgr935.aspx Provides the wiring diagrams and installation guidelines for this GE Series 90-30 module. For further information, please contact Cimtec Technical Support at 1-866-599-6507 [email protected] 1 PLC CPUs 24 IC697CGR935 GFK-1439C 96 MHz, 32-Bit Floating Point, 1 MByte Fast Memory November 1999 PLC CPUs Central Processing Unit for CPU Redundancy Applications 96 MHz, 32-Bit Floating Point, 1 MByte Fast Memory Central Processing Unit for CPU Redundancy Applications (IC697CGR935) datasheet GFK-1439C Features D Symptom status bits and fault tables D Memory parity and checksums D Required for CPU redundancy applications D Supports floating point calculation D CommonI/O on IC660/IC661 bus D Single slot CPU D Manual switching with pushbutton switch on Redundan- D 12K inputs and 12K outputs (any mix) cy Communications Module D Up to 8K analog I/O a45734 D 0.4 microseconds per boolean function D 96 MHz, 80486DX4 microprocessor ÎÎÎÎÎ D SupportsIC660/IC661 and IC697 I/O products ÎÎ OK P1 CGR 935 ÎÎÎÎÎ ÎÎ Î ÎÎ ÎÎÎ D Programmed by MS-DOSr or Windowsr based software RUN P2 Î TOP products EN P3 OFF ÎÎÎÎ Î Î ÎÎ Î ÎÎÎ ÎÎÎ ÎÎÎ D MEM PROTECT O Supports 1 Mbyte of battery-backed fast CMOS RAM B REMOTE PROGRAMMERN ÎÎÎÎÎ Î Î ÎÎÎ ÎÎÎ ÎÎA MEMORY PROTECT memory in the same slot T KEY POSITION T ÎÎÎÎÎ Î Î ÎÎÎ D ÎÎE FRONT Configurable data and program memory R O -

Experiment 2: Identify Common Peripheral Ports, Associated Cables and Their Connectors
Computer maintenance and TROUBLESHOOTING (3350701), Semester – 5th Experiment 2: Identify Common Peripheral ports, associated cables and their connectors. Aim To identify Identify Common Peripheral ports, associated cables and their connectors. Objectives After performing this experiment students will be able to: Identify various peripherals ports. Identify different types of cables used in computer. Identify various connectors. Assumptions Students have basic knowledge of English language and Computer Hardware A Computre System Requirement Screw Driver Software Nil Requirement Learning Major Learning outcome of this experiment are: Outcome Identifying Ports, Cables and Connectors THEORY Port The Point at which peripheral attaches to. Communicates with a system unit so that peripheral can send data to or receive information from the computer. Following are the different Types of Ports of Computer System. 1) PS/2 Ports The PS/2 Ports are simple, 6-pin, low-speed serial connections commonly dedicated to a keyboard and mouse. Although these ports may look identical at first glance, they are not interchangeable, so you'll need to be extremely careful to attach the keyboard and mouse to their respective PS/2 port. 2) VGA Mointer Port Video Graphics Array: used to connect the monitor to the computer 3) Parallel Port P a g e | 8 Computer maintenance and TROUBLESHOOTING (3350701), Semester – 5th The parallel port originally started out as a unidirectional (output only) Printers and other devices are said to be either parallel or serial. Parallel means the device is capable of receiving more than one bit at a time (that is, it receives several bits in parallel). Most modern printers are parallel. -
Linking Computers and Consumer Electronics
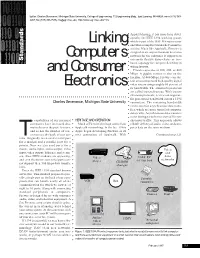
. Editor: Charles Severance, Michigan State University, College of Engineering, 112 Engineering Bldg., East Lansing, MI 48824; voice (517) 353- 2268; fax (517) 355-7516; [email protected]; http://www.egr.msu.edu/~crs Apple’s blessing, it has since been devel- oped by the IEEE 1394 working group, Linking which is part of the IEEE Microprocessor and Microcomputer Standards Committee activity. Much like Appletalk, Firewire is designed as an easy-to-maintain local area Computers network for the consumer. It supports an Standards Bianry Critic extremely flexible daisy-chain- or tree- based topology for complete flexibility in wiring layouts. and Consumer Firewire operates at 100, 200, or 400 Mbps. A gigabit version is also on the horizon. At 400 Mbps, Firewire can sus- tain an uncompressed high-quality digital Electronics video stream using roughly 50 percent of its bandwidth. The standard’s protocols are called isosynchronous. With isosyn- chronous protocols, devices can negotiate for guaranteed bandwidth across a 1394 Charles Severance, Michigan State University connection. The remaining bandwidth can be used for asynchronous data trans- fers, which are more typical of computer data traffic. Asynchronous data transfers occur during periods not reserved for syn- he capabilities of our personal HERITAGE AND OPERATION chronous traffic. This approach allows computers have increased dra- Much of Firewire’s heritage comes from reliable delivery of audio, video, and com- matically over the past 15 years, Appletalk networking. In the late 1980s puter data on the same medium. and so has the number of con- Apple began developing Firewire as its Tnectors on the back of our sys- next generation of Appletalk. -
Serial Port Utilities Installation
Serial Port Utilities August 2018 © 2017, 2018, Dilithium Design Serial Port Utilities Aug 2018 Contents Overview ............................................................................................................................................................................. 2 VCP Driver Installation .................................................................................................................................................. 2 Telnet Client Installation ................................................................................................................................................ 3 Firmware Upgrade .............................................................................................................................................................. 6 Performing an Upgrade .................................................................................................................................................. 6 Mac OSX Driver Installation .............................................................................................................................................. 8 Android Driver Installation ............................................................................................................................................... 13 Warrantee and Support ..................................................................................................................................................... 16 Document History ............................................................................................................................................................ -

How to Make “In Use” COM Ports Available 2 3
How to Make “in use” COM Ports Available When you connect your Computer Timing Interface to a USB Port, Windows assigns a COM Port number to the device. If you use a different USB Port the next time you plug it in, or if you’re also using a USB printer, they might get assigned a different COM Port number each time you use them. When a new port number is assigned, Windows doesn’t always clear the old port number so that it will still show as “in use”. Since TIMEWARE 2/MEETWARE recognize only 9 COM ports, you may eventually run out of available ports (this will change in the next version upgrade). Clearing the “in use” ports that aren’t really being used is a bit cumbersome, so here’s a step-by-step procedure to follow: Window’s Device Manager will show you a list of ports that are currently being used, but will not show ports that are assigned but not currently being used (“in use”). The first step is to make these “in use” ports visible on the list. (The red numbers on the picture match the numbers in the list below.) 1. Go to the Start button or Desktop, right-click on My Computer and select Properties 2. In the System Properties dialog box, select the Advanced tab 3. Click the Environment Variables button 4. In the Environment Variables dialog box, locate the System Variables panel and click New Picture 3 2 5 3 4 5. In the New System Variable dialog box, type DEVMGR_SHOW_NONPRESENT_DEVICES in the Variable Name text box and type 1 in the Variable Value text box. -

Getting Started with Your PCI Serial Hardware and Software for Windows 95
Serial Getting Started with Your PCI Serial Hardware and Software for Windows 95 PCI Serial for Windows 95 December 1997 Edition Part Number 321824A-01 Internet Support E-mail: [email protected] FTP Site: ftp.natinst.com Web Address: http://www.natinst.com Bulletin Board Support BBS United States: 512 794 5422 BBS United Kingdom: 01635 551422 BBS France: 01 48 65 15 59 Fax-on-Demand Support 512 418 1111 Telephone Support (USA) Tel: 512 795 8248 Fax: 512 794 5678 International Offices Australia 03 9879 5166, Austria 0662 45 79 90 0, Belgium 02 757 00 20, Brazil 011 288 3336, Canada (Ontario) 905 785 0085, Canada (Québec) 514 694 8521, Denmark 45 76 26 00, Finland 09 725 725 11, France 01 48 14 24 24, Germany 089 741 31 30, Hong Kong 2645 3186, Israel 03 6120092, Italy 02 413091, Japan 03 5472 2970, Korea 02 596 7456, Mexico 5 520 2635, Netherlands 0348 433466, Norway 32 84 84 00, Singapore 2265886, Spain 91 640 0085, Sweden 08 730 49 70, Switzerland 056 200 51 51, Taiwan 02 377 1200, United Kingdom 01635 523545 National Instruments Corporate Headquarters 6504 Bridge Point Parkway Austin, Texas 78730-5039 USA Tel: 512 794 0100 © Copyright 1997 National Instruments Corporation. All rights reserved. Important Information Warranty The serial hardware is warranted against defects in materials and workmanship for a period of two years from the date of shipment, as evidenced by receipts or other documentation. National Instruments will, at its option, repair or replace equipment that proves to be defective during the warranty period. -

Programming Serial and Parallel Ports
,ch11.21375 Page 306 Tuesday, June 12, 2001 9:49 AM Chapter 11 11 Programming Serial and Parallel Ports 11: 11.0. Introduction Peripheral devices are usually external to the computer.* Printers, mice, video cameras, scanners, data/fax modems, plotters, robots, telephones, light switches, weather gauges, Palm Computing Platform devices, and many others exist “out there,” beyond the confines of your desktop or server machine. We need a way to reach out to them. The Java Communications API not only gives us that, but cleverly unifies the pro- gramming model for dealing with a range of external devices. It supports both serial (RS232/434, COM, or tty) and parallel (printer, LPT) ports. We’ll cover this in more detail later, but briefly, serial ports are used for modems and occasionally printers, and parallel ports are used for printers and sometimes (in the PC world) for Zip drives and other peripherals. Before USB (Universal Serial Bus) came along, it seemed that parallel ports would dominate for such peripherals, as manu- facturers were starting to make video cameras, scanners, and the like. Now, how- ever, USB has become the main attachment mode for such devices. One can imagine that future releases of Java Communications might expand the structure to include USB support (Sun has admitted that this is a possibility) and maybe other bus-like devices. This chapter† aims to teach you the principles of controlling these many kinds of devices in a machine-independent way using the Java Communications API, which is in package javax.comm. * Conveniently ignoring things like “internal modem cards” on desktop machines! † This chapter was originally going to be a book. -

Fabulatech Products.Pdf
FabulaTech Products Advanced Communications Solutions USB over Network USB for Remote Desktop Scanner for Remote Desktop Webcam for Remote Desktop Biometrics for Remote Desktop Serial Port for Remote Desktop Printer for Remote Desktop Sound for Remote Desktop Serial Port Redirector Serial Port Splitter Virtual Serial Port Kit Network Serial Port Kit Virtual Modem Serial Port Mapper Virtual Serial Port Control Serial Port Control USB Monitor Pro Copyright © FabulaTech LLP. USB over Network Share and access your USB devices over local network or Internet. Brief Overview Goals USB over Network is a user-friendly application Real USB virtualization technology that enables you to access USB devices over LAN Supports a wide range of USB devices or the Internet. USB port Sharing. The program allows working with remote USB devices over a regular TCP/IP connection. It Quick Specs provides you with easy and reliable way to share or get remote access to USB devices. As soon as Supported OS: Windows, Linux you install USB over Network Server you will be Latest Version: 6.0.4 able to share USB devices over any network. When you connect the remotely shared USB devices to the computer with USB over Network Client installed, they are recognized by operating system as if they were attached directly to it. Copyright © 2000 — 2021 FabulaTech LLP. All rights reserved. 2 USB for Remote Desktop Access local USB devices in remote Windows session. Brief Overview Goals USB for Remote Desktop is an application for 100% Software solution redirecting USB devices to your remote session. It Compatible with all types of USB devices redirects any USB devices to remote desktop USB port redirection environments over Microsoft RDP, Teradici PCoIP or Citrix ICA protocols. -

Understanding and Connecting UART Devices
Understanding and Connecting UART Devices ECE 480: Design Team 4 Application Note August Garrett November 14, 2014 Abstract: Electronic devices are capable of sending important signals to other devices through certain types of wireless or wired transmission lines. These communicating signals help several electronic devices work together in forming a single, multipurpose system. Ensuring that these devices properly communicate with each other can often grow complicated due to incompatible transmission lines and data transfer rates. This note will briefly explain how to properly connect multiple devices together that use serial communication and ensure that the desired information is accurately transmitted and received between them. 1 | P a g e Table of Contents Abstract ......................................................................................................................................................... 1 Key Words ..................................................................................................................................................... 3 Introduction .................................................................................................................................................. 3 Operation ...................................................................................................................................................... 3 Viewing Output Information with Tera Term .............................................................................................. -

USB-To-Serial Converter for IEI Access Systems
USB-to-Serial Converter Installation Instructions USB-to-Serial Converter for IEI Access Systems Model # 0295097 Specifications/Requirements: Mechanical: Electrical: Form Factor: Single-Gang Plate Operating Voltage: 5V (USB Port Powered) Circuit Board Dimensions: 2.555” x 1.8” Current Draw: Normal: 26mA Mounts to single-gang Handy Box or Work Box USB Suspend Mode: less than 500µA Wire Specifications: Software: Refer to wiring sections See Below Environmental: PC Connections: Environment: For indoor use only. USB Port (v1.1 or v2.0) Temperature Tolerance: 32º F to 120º F (0º – 49ºC) Description The USB-to-Serial Converter is used to connect your PC to a HubMax II, Hub MiniMax II, Max 3, MiniMax 3or prox.pad Plus via the computer's USB port. The unit requires no hardware configuration and is ready to communicate to either type of device. Software Compatibility and Driver Installation The USB Converter is compatible with a USB port (v1.1 or v2.0) and works with any version of Hub Manager Professional. To use the USB device you must install the USB drivers. It is plug and play, so when you plug it in, your PC should recognize the new hardware and attempt to install the drivers. You can either tell Windows to search automatically or browse to the drivers yourself, which are located on the Hub Manager Professional Installation CD, version 7.1.4 (or higher) and copied onto the PC when you run the Hub Manager software installation. The driver locations on the PC are as follows: For Windows 98 and ME: C:\Program Files\IEI\HubManagerPro7\Program\Utilities\USB_Driver\FTDI_98-ME For Windows 2000, XP and Server 2003 International Electronics, Inc. -

Computer Vision Processing Using Webcams with Java in Eclipse 3
Software Installation Guide for L2Bot * Jan 21, 2011 (*) This Guide has been tested under Windows XP and Windows 7 1. Webcam driver 2. JMF 2.1.1.1.e 3. Eclipse setup for Webcam 4. Java comm API 5. Configure Eclipse for comm API 6. Let’s drive L2Bot! 0. Install JDK (Java Development Kit) and Eclipse Check if you are using a 64-bit Operating System. (Right click “Computer” on the desktop and slect property to get the information.) L2Bot requires 32 bit software. Download the newest version of 32 bit JDK (Java Development Kit) from: http://www.oracle.com/technetwork/java/javase/downloads Note that 32 bit system is also called x86. If you already have 64 bit JDK version, it is fine to have 32 bit JRE (Java Runtime Environment) in addition on your computer. By default, it will be installed under c:\Program Files (x86)\Java. Download the newest version of the Eclipse IDE (either for Developers or Classic) from http://www.eclipse.org/downloads You do not need to install 32 bit Eclipse, when you have 64 bit OS. Find the downloaded Eclipse zip file, and extract it to a location. Inside the extracted Eclipse folder, you should find the Eclipse application. You may want to make a shortcut of this onto your desktop. At least “Hello World” program using Eclipse must be tested before beginning the following installations. 1. Webcam driver installation If your laptop has built in webcam, then skip this section 1. Usually the driver is already installed. Any webcams (or camcorders) can be used for the L2Bot. -
Technical Note 170 USB to Serial Port Adapter
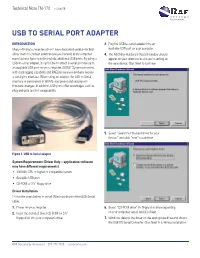
Technical Note TN-170 07/04/YB USB TO SERIAL PORT ADAPTER INTRODUCTION 3. Plug the USB-to-serial adapter into an Many of today’s computers do not have dedicated serial ports that available USB port on your computer. allow users to connect external devices. Instead, many computer 4. The Add New Hardware Wizard window should manufactures have opted to include additional USB ports. By using a appear on your screen to assist you in setting up USB-to-serial adapter, it is possible to attach a serial port device to the new device. Click Next to continue. an available USB port on your computer. All RAE Systems monitors with datalogging capability and RAELink wireless modems require a serial port interface. When using an adapter, the USB to Serial interface is transparent to all RAE equipment and requires no firmware changes. In addition, USB ports offer advantages such as plug-and-play and hot swappability. 5. Select “Search for the best driver for your device,” and click “next” to continue. Figure 1. USB to Serial adapter System Requirements (Driver Only – application software may have different requirements) • 100 MHz CPU or higher or compatible system • Available USB port • CD-ROM or 3.5” floppy drive Driver Installation Follow the steps below to install Windows driver of the USB-Serial cable: 1. Power on your computer. 6. Select “CD-ROM drive” (or floppy disk drive depending 2. Insert the included driver CD ROM (or 3.5” on your computer setup) and click Next. floppy disk) into your computer’s drive. 7.