Electric Sail Missions to Potentially Hazardous Asteroids
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

And the Alpha Capricornid Shower P
TB, MG, AJ/328991/ART, 20/03/2010 The Astronomical Journal, 139:1–9, 2010 ??? doi:10.1088/0004-6256/139/1/1 C 2010. The American Astronomical Society. All rights reserved. Printed in the U.S.A. MINOR PLANET 2002 EX12 (=169P/NEAT) AND THE ALPHA CAPRICORNID SHOWER P. Jenniskens1 and J. Vaubaillon2 1 SETI Institute, 515 N. Whisman Road, Mountain View, CA 94043, USA; [email protected] 2 I.M.C.C.E., Paris Observatory, 77 Av. Denfert Rochereau, 75014 Paris, France Received 2009 August 20; accepted 2010 February 4; published 2010 ??? ABSTRACT Minor planet 2002 EX12 (=comet 169P/NEAT) is identified as the parent body of the alpha Capricornid shower, based on a good agreement in the calculated and observed direction and speed of the approaching meteoroids for ejecta 4500–5000 years ago. The meteoroids that come to within 0.05 AU of Earth’s orbit show the correct radiant position, radiant drift, approach speed, radiant dispersion, duration of activity, and distribution of dust at the other node, but meteoroids ejected 5000 years ago by previously proposed parent bodies do not. A more recent formation epoch is excluded because not enough dust would have evolved into Earth’s path. The total mass of the stream is about 9 × 1013 kg, similar to that of the remaining comet. Release of so much matter in a short period of time implies a major disruption of the comet at that time. The bulk of this matter still passes inside Earth’s orbit, but will cross Earth’s orbit 300 years from now. -
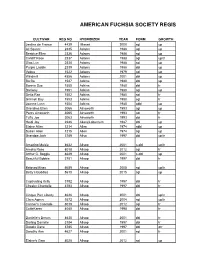
Regn Lst 1948 to 2020.Xls
AMERICAN FUCHSIA SOCIETY REGISTERED FUCHSIAS, 1948 - 2020 CULTIVAR REG NO HYBRIDIZER YEAR FORM GROWTH Jardins de France 4439 Massé 2000 sgl up All Square 2335 Adams 1988 sgl up Beatrice Ellen 2336 Adams 1988 sgl up Cardiff Rose 2337 Adams 1988 sgl up/tr Glas Lyn 2338 Adams 1988 sgl up Purple Laddie 2339 Adams 1988 dbl up Velma 1522 Adams 1979 sgl up Windmill 4556 Adams 2001 dbl up Bo Bo 1587 Adkins 1980 dbl up Bonnie Sue 1550 Adkins 1980 dbl tr Dariway 1551 Adkins 1980 sgl up Delta Rae 1552 Adkins 1980 sgl tr Grinnell Bay 1553 Adkins 1980 sgl tr Joanne Lynn 1554 Adkins 1980 sdbl up Grandma Ellen 3066 Ainsworth 1993 sgl up Percy Ainsworth 3065 Ainsworth 1993 sgl tr Tufty Joe 3063 Ainsworth 1993 dbl tr Heidi Joy 2246 Akers/Laburnum 1987 dbl up Elaine Allen 1214 Allen 1974 sdbl up Susan Allen 1215 Allen 1974 sgl up Grandpa Jack 3789 Allso 1997 dbl up/tr Amazing Maisie 4632 Allsop 2001 s-dbl up/tr Amelia Rose 8018 Allsop 2012 sgl tr Arthur C. Boggis 4629 Allsop 2001 s-dbl up Beautiful Bobbie 3781 Allsop 1997 dbl tr Beloved Brian 5689 Allsop 2005 sgl up/tr Betty’s Buddies 8610 Allsop 2015 sgl up Captivating Kelly 3782 Allsop 1997 dbl tr Cheeky Chantelle 3783 Allsop 1997 dbl tr Cinque Port Liberty 4626 Allsop 2001 dbl up/tr Clara Agnes 5572 Allsop 2004 sgl up/tr Conner's Cascade 8019 Allsop 2012 sgl tr CutieKaren 4040 Allsop 1998 dbl tr Danielle’s Dream 4630 Allsop 2001 dbl tr Darling Danielle 3784 Allsop 1997 dbl tr Doodie Dane 3785 Allsop 1997 dbl gtr Dorothy Ann 4627 Allsop 2001 sgl tr Elaine's Gem 8020 Allsop 2012 sgl up Generous Jean 4813 -

198 5MNRAS.212. .817S Mon. Not. R. Astr. Soc. (1985
Mon. Not. R. astr. Soc. (1985) 212, 817-836 .817S 5MNRAS.212. Collisions in the Solar System -1. 198 Impacts of the Apollo-Amor-Aten asteroids upon the terrestrial planets Duncan I. Steel and W. J. Baggaley Department of Physics, University of Canterbury, Christchurch, New Zealand Accepted 1984 September 26. Received 1984 September 14; in original form 1984 July 11 Summary. The collision probability between each of the presently-known population of four Aten, 34 Apollo and 38 Amor asteroids and each of the terrestrial planets is determined by a new technique. The resulting mean collision rates, coupled with estimates of the total undiscovered population of each class, is useful in calculating the rate of removal of these bodies by the terrestrial planets, and the cratering rate on each planet by bodies of diameter in excess of 1 km. The influx to the Earth is found to be one impact per 160 000 yr, but this figure is biased by the inclusion of four recently-discovered low-inclination Apollos. Excluding these four the rate would be one per 250 000 yr, in line with previous estimates. The impact rate is highest for the Earth, being around twice that of Venus. The rates for Mercury and Mars using the present sample are about one per 5 Myr and one per 1.5 Myr respectively. 1 Introduction Over the past two decades our knowledge of the asteroids has expanded greatly. Physical studies of these bodies, reviewed by Chapman, Williams & Hartman (1978), Chapman (1983) and in Gehrels (1979), have shown that distinct groups of common genesis exist. -

(2000) Forging Asteroid-Meteorite Relationships Through Reflectance
Forging Asteroid-Meteorite Relationships through Reflectance Spectroscopy by Thomas H. Burbine Jr. B.S. Physics Rensselaer Polytechnic Institute, 1988 M.S. Geology and Planetary Science University of Pittsburgh, 1991 SUBMITTED TO THE DEPARTMENT OF EARTH, ATMOSPHERIC, AND PLANETARY SCIENCES IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF DOCTOR OF PHILOSOPHY IN PLANETARY SCIENCES AT THE MASSACHUSETTS INSTITUTE OF TECHNOLOGY FEBRUARY 2000 © 2000 Massachusetts Institute of Technology. All rights reserved. Signature of Author: Department of Earth, Atmospheric, and Planetary Sciences December 30, 1999 Certified by: Richard P. Binzel Professor of Earth, Atmospheric, and Planetary Sciences Thesis Supervisor Accepted by: Ronald G. Prinn MASSACHUSES INSTMUTE Professor of Earth, Atmospheric, and Planetary Sciences Department Head JA N 0 1 2000 ARCHIVES LIBRARIES I 3 Forging Asteroid-Meteorite Relationships through Reflectance Spectroscopy by Thomas H. Burbine Jr. Submitted to the Department of Earth, Atmospheric, and Planetary Sciences on December 30, 1999 in Partial Fulfillment of the Requirements for the Degree of Doctor of Philosophy in Planetary Sciences ABSTRACT Near-infrared spectra (-0.90 to ~1.65 microns) were obtained for 196 main-belt and near-Earth asteroids to determine plausible meteorite parent bodies. These spectra, when coupled with previously obtained visible data, allow for a better determination of asteroid mineralogies. Over half of the observed objects have estimated diameters less than 20 k-m. Many important results were obtained concerning the compositional structure of the asteroid belt. A number of small objects near asteroid 4 Vesta were found to have near-infrared spectra similar to the eucrite and howardite meteorites, which are believed to be derived from Vesta. -

The Role of Radar in Predicting and Preventing Asteroid and Comet Collisions with Earth Steven J
3 The role of radar in predicting and preventing asteroid and comet collisions with Earth Steven J. Ostro JetPropulsion Laboratory, California Institute of Technology Jon D. Giorgini JetPropulsion Laboratory, California Institute of Technology 1 Introduction The current Spaceguard Survey classifies each known near-Earth asteroid (NEA) as either non-threatening or deserving of additional astrometric attention. For any possibly threatening object, the dominant issues are the uncertainty in its trajectory and physical nature as well as what can be done to reduce that uncertainty. Morrison et al. (2002) note that From the standpoint of an allocator of society’s resources, an uncertain threat calls for adaptive policies, delaying potentially costly action but informing later decision by investing in uncertainty-reduction measures. In the context of the NEO impact hazard, this means avoiding the costs of standing organizational structures and capital expenditures until a threat materializes. Thus reduction in uncertainty is tantamount to ensuring that unnecessary costs are avoided and that necessary actions are undertaken with adequate warning. Ground-based radar is a knowledge-gathering tool that is uniquely able to shrink uncertainty in NEO trajectories and physical properties. The power of radar stems largely from the precision of its measurements (Table 3.1). The resolution of echoes in time delay (range) and Doppler frequency (radial velocity) is often of order 1/100 the extent of a kilometer-sized target, so several thousand radar image pixels can be placed on the target. Delay-Doppler positional measurements often have a fractional precision finer than 1/10 000 000, comparable to sub-milliarcsecond optical astrometry. -

Optimal Flight to Near-Earth Asteroids with Using Electric Propulsion and Gravity Maneuvers
OPTIMAL FLIGHT TO NEAR-EARTH ASTEROIDS WITH USING ELECTRIC PROPULSION AND GRAVITY MANEUVERS A. V. Chernov Keldysh Institute of Applied Mathematics, Miusskaya Sq. 4, Moscow, 125047, Russia, E-mail: [email protected] ABSTRACT Optimal space flight to near-Earth asteroid for using low thrust and gravity assist maneuver near Mars or Venus is investigated in this paper. The main deflection asteroids from the Earth and prevention their possible collision is investigated. The deflection is attention is given a case of the ideal low thrust. Besides realized by means of impact-kinetic effect of the optimal trajectories with the constrained low trust spacecraft on the asteroid and changing the asteroid appropriate to electric engine SPT-140 and solar orbit. The effectiveness of this method for preventing batteries as energy sources are received in vicinity of the optimal trajectories for ideal thrust. asteroid-Earth collision is estimated by means of optimal space flights, which are found. The flight of spacecraft (SC) is realized by means of using electric 2. THE PROBLEM STATEMENT propulsion system. To increase effectiveness the optimal gravity maneuvers of spacecraft near Mars and At first the SC with mass M0 moves along an initial Venus are using. Criterion of the space flight circular near-Earth parking orbit with radius R0. The optimization is maximal deflection of the asteroid from geocentric motion is realized by means of high thrust the Earth at the moment of asteroid-Earth nearest engine with the gas exhaust velocity c1. At moment t1 approach. For determination of optimal trajectories the the SC is applied the velocity impulse ∆V and the SC is maximum Pontrjagin principle is used. -

The Near-Earth Asteroid Rendezvous (NEAR-Shoemaker) Mission / Howard E
I-38738 NEAR BookCVR.Fin2 3/10/05 11:58 AM Page 1 d National Aeronautics and Space Administration Office of External Relations Low-CostLow-Cost History Division Washington, DC 20546 InnovationInnovation inin SpaceflightSpaceflight TheThe NearNear EarthEarth AsteroidAsteroid RendezvousRendezvous (NEAR)(NEAR) ShoemakerShoemaker MissionMission Monographs in Aerospace History No. 36 • SP-2005-4536 fld I-38738 NEAR BookCVR.Fin2 3/10/05 11:58 AM Page 2 Cover (from the top): The cover combines a closeup image of Eros, a photograph of the 1996 launch of the Near Earth Asteroid Rendezvous (NEAR) expedition, and a picture of the mission operations center taken during the second year of flight. NEAR operations manager Mark Holdridge stands behind the flight consoles. Asteroid and operations center photographs courtesy of Johns Hopkins University/Applied Physics Laboratory. Launch photograph courtesy of the National Aeronautics and Space Administration. (NASA KSC-96PC-308) Howard E. McCurdy Low-Cost Innovation in Spaceflight The Near Earth Asteroid Rendezvous (NEAR) Shoemaker Mission The NASA History Series Monographs in Aerospace History Number 36 NASA SP-2005-4536 National Aeronautics and Space Administration Office of External Relations History Division Washington, DC 2005 Library of Congress Cataloging-in-Publication Data McCurdy, Howard E. Low cost innovation in spaceflight : the Near-Earth Asteroid Rendezvous (NEAR-Shoemaker) Mission / Howard E. McCurdy. p. cm. — (Monographs in aerospace history ; no. 36) 1. Microspacecraft. 2. Eros (Asteroid) -

– Near-Earth Asteroid Mission Concept Study –
ASTEX – Near-Earth Asteroid Mission Concept Study – A. Nathues1, H. Boehnhardt1 , A. W. Harris2, W. Goetz1, C. Jentsch3, Z. Kachri4, S. Schaeff5, N. Schmitz2, F. Weischede6, and A. Wiegand5 1 MPI for Solar System Research, 37191 Katlenburg-Lindau, Germany 2 DLR, Institute for Planetary Research, 12489 Berlin, Germany 3 Astrium GmbH, 88039 Friedrichshafen, Germany 4 LSE Space AG, 82234 Oberpfaffenhofen, Germany 5 Astos Solutions, 78089 Unterkirnach, Germany 6 DLR GSOC, 82234 Weßling, Germany ASTEX Marco Polo Symposium, Paris 18.5.09, A. Nathues - 1 Primary Objectives of the ASTEX Study Identification of the required technologies for an in-situ mission to two near-Earth asteroids. ¾ Selection of realistic mission scenarios ¾ Definition of the strawman payload ¾ Analysis of the requirements and options for the spacecraft bus, the propulsion system, the lander system, and the launcher ASTEX ¾ Definition of the requirements for the mission’s operational ground segment Marco Polo Symposium, Paris 18.5.09, A. Nathues - 2 ASTEX Primary Mission Goals • The mission scenario foresees to visit two NEAs which have different mineralogical compositions: one “primitive'‘ object and one fragment of a differentiated asteroid. • The higher level goal is the provision of information and constraints on the formation and evolution history of our planetary system. • The immediate mission goals are the determination of: – Inner structure of the targets – Physical parameters (size, shape, mass, density, rotation period and spin vector orientation) – Geology, mineralogy, and chemistry ASTEX – Physical surface properties (thermal conductivity, roughness, strength) – Origin and collisional history of asteroids – Link between NEAs and meteorites Marco Polo Symposium, Paris 18.5.09, A. -

Meteor Showers Associated with the Near-Earth Asteroid (2101) Adonis
A&A 397, 319–323 (2003) Astronomy DOI: 10.1051/0004-6361:20021506 & c ESO 2003 Astrophysics Meteor showers associated with the near-Earth asteroid (2101) Adonis P. B. Babadzhanov? Institute of Astrophysics, Tajik Academy of Sciences, and Isaac Newton Institute of Chile, Tajikistan Branch; Bukhoro Str. 22, Dushanbe 734042, Tajikistan Received 22 August 2002 / Accepted 19 September 2002 Abstract. The orbital evolution of the near-Earth asteroid (2101) Adonis under gravitational action of six planet (Mercury to Saturn) is investigated by the Halphen-Goryachev method. The theoretical geocentric coordinates and velocities of four possible meteor showers associated with this asteroid are determined. Using published data, the theoretically predicted showers are identified with the observed ones, namely, night-time σ-Capricornids and χ-Sagittariids, and day-time χ-Capricornids and Capricornids-Sagittariids. The existence of meteor showers associated with Adonis provides evidence supporting the conjecture that this asteroid may be of a cometary nature. The small 50-m near-Earth asteroid 1995 CS probably represents a large Adonis fragment and belongs to a part of the Adonis meteoroid stream, which produces the day-time χ-Capricornids meteor shower. Key words. comets: general – meteors, meteoroids – minor planets, asteroids 1. Introduction can only be meaningful when conducted within the NEA pop- ulation. There are currently (August 5, 2002) 1947 NEAs According to the available data regarding Near-Earth (http://newton.dm.unipi.it/cgi-bin/neodys)andthe Asteroids (NEAs), they may originate either from the main number of newly discovered NEAs is increasing very rapidly. belt of asteroids or be extinct comets. -

Manned Mission to NEO Study
National Aeronautics and Space Administration Manned Mission to NEO Study Jerry Condon, NASA/JSC/EG5 Jacob Williams, ESCG Elizabeth Davis, ESCG David Lee, NASA/JSC/EG5 Juan Senent, OSR Sept. 27, 2010 Run Methodology ΔVAD Patch conic assumptions. V∞EI ΔtAE Asteroid Earth departure epoch [1900 Cases]: Departure • Start: Jan 01, 2015 00:00:00 Earth Arrival Step: 5 days • ΔtS • End: Dec 31, 2040 00:00:00 Earth-Asteroid transfer time [72]: ΔVAA • Start: 30 days • Step: 5 days Asteroid Arrival • End: 360 days Asteroid stay time [6]: • Start: 7 days • Step 7 days • End: 42 days Asteroid-Earth transfer time [72]: • Start: 5 days Step: 5 days V∞ED • ΔtEA • End: 360 days 1900x72x6x72 = 59,097,600 cases per asteroid Earth Departure 5766 Asteroids 340,756,761,600 cases total. Run time of ~2 hrs on JSC cluster Pre-Decisional: For NASA Internal Use Only 2 Asteroid Cases JPL Small-Body Database Search Engine: http://ssd.jpl.nasa.gov/sbdb_query.cgi Export CSV file which is read by the program Input parameters: • Object group : NEOs • Object kind: Asteroids Damon Landau 9/1/2010: • Numbered state: All objects Assumed diameter > 50 m • Constraints: H (mag) ≤ 24.2 abs. vis. mag. < 24.2 • 5766 Asteroids in this set (as of 8-26-2010) - Note: without the H constraint, the total number is 7183. Output parameters: • SPK-ID • object fullname • Absolute magnitude: H (mag) • Rotation period: rot_per (h) • Keplerian elements - Epoch of osculation: epoch (MJD) - Semi-major axis: a (AU) - Eccentricity: e - Inclination: i (deg) Assuming these are in - -

UNIVERSIDADE FEDERAL DO RIO DE JANEIRO Instituto De Física
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO Instituto de Física Programa de Pós-Graduação em Ensino de Física Mestrado Profissional em Ensino de Física Mestrado Nacional Profissional em Ensino de Física O ENSINO INVESTIGATIVO DO MOVIMENTO DE PEQUENOS CORPOS DO SISTEMA SOLAR A PARTIR DE RECURSOS DISPONÍVEIS NA INTERNET Gilberto Rubens de Oliveira Nobre Dissertação de Mestrado apresentada ao Programa de Pós-Graduação em Ensino de Física, Instituto de Física, da Universidade Federal do Rio de Janeiro, como parte dos requisitos necessários à obtenção do título de Mestre em Ensino de Física. Orientadora: Deise Miranda Vianna Rio de Janeiro Novembro de 2016 O ENSINO INVESTIGATIVO DO MOVIMENTO DE PEQUENOS CORPOS DO SISTEMA SOLAR A PARTIR DE RECURSOS DISPONÍVEIS NA INTERNET Gilberto Rubens de Oliveira Nobre Orientadora: Deise Miranda Vianna Dissertação de Mestrado submetida ao Programa de Pós-Graduação em Ensino de Física, Instituto de Física, da Universidade Federal do Rio de Janeiro - UFRJ, como parte dos requisitos necessários à obtenção do título de Mestre em Ensino de Física. Aprovada por: __________________________________________ Dra. Deise Miranda Vianna - UFRJ/IF (Presidente) __________________________________________ Dra. Anna Maria Pessoa de Carvalho - USP/FE __________________________________________ Dr. Ladário da Silva - UFF/ICEx __________________________________________ Dr. José Adolfo Snajdauf de Campos - UFRJ/OV Rio de Janeiro Novembro de 2016 ii FICHA CATALOGRÁFICA N754e Nobre, Gilberto Rubens de Oliveira. O ensino investigativo do movimento de pequenos corpos do Sistema Solar a partir de recursos disponíveis na internet / Gilberto Rubens de Oliveira Nobre. – Rio de Janeiro: UFRJ/IF, 2016. ix, 218 f. : il. ; 30 cm. Orientadora: Deise Miranda Vianna. Dissertação (mestrado) – UFRJ / Instituto de Física / Programa de Pós-Graduação em Ensino de Física, 2016. -

Determination of Masses of Mercury and Venus from Observations of Five Minor Planets
ACTA ASTRONOMICA Vol. 45 (1995) pp. 665±672 Determination of Masses of Mercury and Venus from Observations of Five Minor Planets by G. Sitarski Space Research Center, Polish Academy of Sciences, ul. Bartycka 18a, 00-716 Warsaw, Poland e-mail: [email protected] Received June 8, 1995 ABSTRACT We collected 1985 astrometric observations of the ®ve minor planets: (1566) Icarus, (1620) Geographos, (1862) Apollo, (2101) Adonis and (2212) Hephaistos. The asteroids can closely approach Mercury and Venus. The observations cover the time interval from 1930 for Apollo up to 1995 for Adonis. Equations of motion of the asteroids have been integrated by the recurrent power series including all the planetary perturbations, perturbations caused by the four biggest minor planets and relativistic effects. Joining all the observational equations for the ®ve asteroids we created a set of thirty two normal equations to determine by the least squares method thirty corrections to orbital elements of the ®ve asteroids along with two corrections to the planetary masses. Thus we found the following values of the reciprocal masses for Mercury and Venus in the solar unit mass: 1 1 m m = = 6019522 9964 408522 85 8 80 M V Key words: Planets and satelites: individual: Mercury, Venus ± Minor planets, asteroids 1. Introduction Determination of planetary masses is a dif®cult problem whentheplanet has no satellite. It is the known caseof Pluto that its mass was overestimated until the Plu- ton's moon, Charon, was discovered in 1978. Mercury and Venus have no moons, therefore, masses of these planets can be determined from their disturbing effects in the motion of asteroids closely approaching the planets and observed during long time intervals.