Longshore Currents Near Cape Hatteras, Nc
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Public Swimming Pools List of Director Approved Colors
Public Swimming Pools List of Director approved colors In accordance with the Ohio Administrative Code (OAC) rules 3701-31-02(G)(2) and (3) and 5.1(C)(1)(b) "the interior surfaces of pools and spas shall be painted white, unless the color is approved by the director." This requirement became effective Jan. 1, 1999 and was revised effective April 1, 2011; and applies to new pools and spas as well as existing pools/spas that will be repainted or will receive a new finish. The colors listed below were submitted to the Ohio Department of Health (ODH) and have been approved. This list does not apply to primer colors. This list also applies to other colored finishes such as tile and pool/spa liners. This list may be periodically revised to add or delete colors. If you have any questions, please call the Public Swimming Pool Program at 614-644-7438. This is not a comprehensive list: any color may be submitted by the manufacturer and be evaluated on a case by case basis. Black or dark lane markers and target marks are exempted from this requirement provided that they meet the standards of the appropriate governing body. Submittals may be sent to: Ohio Department of Health Bureau of Environmental Health and Radiation Protection 246 North High Street Columbus, OH 43215 Attn: Public Swimming Pool Program Any logos or other unique artwork proposed for the pool/spa bottom must be submitted to and approved by ODH. Contact the Public Swimming Pool Program for additional information about logo submissions. -

Safety Data Sheet
Sea Foam Sales Company 12987 Pioneer Trail Eden Prairie, MN, USA 55347 Sea Foam Motor Treatment SDS Revision Date: 12/05/2016 Page 1 of 10 SAFETY DATA SHEET SECTION 1. IDENTIFICATION Product identifier used on the label : Sea Foam Motor Treatment Product Code(s) : SF-16, SF-128, SF-55 Recommended use of the chemical and restrictions on use : Fuel system treatment / Transmission treatment. Use pattern: Consumer use; professional use. Chemical family : Mixture. Name, address, and telephone number Name, address, and telephone number of of the supplier: the manufacturer: Sea Foam Sales Company Refer to supplier 12987 Pioneer Trail Eden Prairie, MN, USA 55347 Supplier's Telephone # : (952) 938-4811 24 Hr. Emergency Tel # : INFOTRAC - (800) 535-5053 (Within Continental US); (352) 323-3500 (Outside US) NOTE: INFOTRAC emergency number is to be used only in the event of chemical emergencies involving a spill, leak, fire, exposure or accident involving chemicals. SECTION 2. HAZARDS IDENTIFICATION Classification of the chemical Clear liquid. Petroleum hydrocarbon odor. Most important hazards: This material is classified as hazardous under OSHA regulations (29CFR 1910.1200) (Hazcom 2012). Hazardous classification: Flammable liquid - Category 2 Serious eye damage/eye irritation - Category 2A Specific target organ toxicity - single exposure - Category 3 Aspiration toxicity - Category 1 WHMIS information: This product is a WHMIS Controlled Product. It meets one or more of the criteria for a controlled product provided in Part IV of the Canadian Controlled Products Regulations (CPR). WHMIS Classification: Class B2 (Flammable Liquids) Class D2B (Materials Causing Other Toxic Effects, Toxic Material) Label elements The following label information is applicable only to the United States according to OSHA Regulations (29 CFR 1910.1200) (Hazcom 2012): Signal Word DANGER! Hazard statement(s) Highly flammable liquid and vapor. -

Coastal and Marine Ecological Classification Standard (2012)
FGDC-STD-018-2012 Coastal and Marine Ecological Classification Standard Marine and Coastal Spatial Data Subcommittee Federal Geographic Data Committee June, 2012 Federal Geographic Data Committee FGDC-STD-018-2012 Coastal and Marine Ecological Classification Standard, June 2012 ______________________________________________________________________________________ CONTENTS PAGE 1. Introduction ..................................................................................................................... 1 1.1 Objectives ................................................................................................................ 1 1.2 Need ......................................................................................................................... 2 1.3 Scope ........................................................................................................................ 2 1.4 Application ............................................................................................................... 3 1.5 Relationship to Previous FGDC Standards .............................................................. 4 1.6 Development Procedures ......................................................................................... 5 1.7 Guiding Principles ................................................................................................... 7 1.7.1 Build a Scientifically Sound Ecological Classification .................................... 7 1.7.2 Meet the Needs of a Wide Range of Users ...................................................... -

Coastal Marine Habitats Harbor Novel Early-Diverging Fungal Diversity
Fungal Ecology 25 (2017) 1e13 Contents lists available at ScienceDirect Fungal Ecology journal homepage: www.elsevier.com/locate/funeco Coastal marine habitats harbor novel early-diverging fungal diversity * Kathryn T. Picard Department of Biology, Duke University, Durham, NC, 27708, USA article info abstract Article history: Despite nearly a century of study, the diversity of marine fungi remains poorly understood. Historical Received 12 September 2016 surveys utilizing microscopy or culture-dependent methods suggest that marine fungi are relatively Received in revised form species-poor, predominantly Dikarya, and localized to coastal habitats. However, the use of high- 20 October 2016 throughput sequencing technologies to characterize microbial communities has challenged traditional Accepted 27 October 2016 concepts of fungal diversity by revealing novel phylotypes from both terrestrial and aquatic habitats. Available online 23 November 2016 Here, I used ion semiconductor sequencing (Ion Torrent) of the ribosomal large subunit (LSU/28S) to Corresponding Editor: Felix Barlocher€ explore fungal diversity from water and sediment samples collected from four habitats in coastal North Carolina. The dominant taxa observed were Ascomycota and Chytridiomycota, though all fungal phyla Keywords: were represented. Diversity was highest in sand flats and wetland sediments, though benthic sediments Marine fungi harbored the highest proportion of novel sequences. Most sequences assigned to early-diverging fungal Ion torrent groups could not be assigned -
Complete Newsletter
Nature’sWeb Issue No. 29 Spring 2013 INSIDE THIS ISSUE... Editor’s Page Birds Feeding on In a Flap! the Mudflats Captain Cockle: Fish that fish for fish... The Elephant The African Savannas Emma Chase, Deelish Garden Centre Colour In Wordsearch Reading a Weather Chart Learn More The World Around Us Green Fingers Fun Page Elephant he Little Egret, a relative of the Grey Heron, Pop-up Card T showing off its large wingspan as it searches for Tfood in Kinish Harbour, Sherkin Island, Co. Cork. Robbie Murphy Robbie Nature’s © Noticeboard Image © 2013 Sherkin Island Marine Station & its licensors. All rights reserved. www.naturesweb.ie Editor’s Page Welcome to the A Snowstorm in Boston... Spring Edition of aving braved Hurricane Sandy in December, the east coast of the US was hit with Nature’s Web! Hyet more extreme weather in February 2013. One of my brothers lives in Boston, MA, where 61 cm (24 inches) of snow fell during a snowstorm in just 24 hours. In Boston, 80-100 km per hour winds created huge snow drifts, blowing snow up the side of houses, creating deep pockets of snow and knocking out electricity for hundreds of Dear Reader, thousands of homes. A state of emergency was called for a 24-hour period and only workers such as emergency service providers and medical staff were allowed on the Welcome everyone to the main roads. Everyone else had to stay indoors so as to allow ploughs to clear the roads Spring issue of Nature’s more easily and also to ensure people did not become trapped in their vehicles. -

Periodic Patterns of Rippled and Smooth Area's on Water Surfaces, Induced by Wind Action
GEOPHYSICS PERIODIC PATTERNS OF RIPPLED AND Sl\'IOOTH AREA'S ON W ATER SURFACES, INDUCED BY WIND ACTION BY L. M. J. U. VAN STRAATEN (Communicated by Prof. F. A. VENING MEINESZ at the meeting of June 24, 1950) In the course of the years 1948 and 1949 the author carried out marine geological researches in the Dutch Wadden sea 1). This Wadden sea is a tidal flat area, the bottom of which is uncovered for the greater part at every ordinary low tide. During the researches two phenomena were observed almost invariably whenever the relevant conditions as to wind velocity, depth etc. were fulfil1ed. Both phenomena, though quite different as to their mechanism of development, are connected with the presence of small quantities of contaminations on the surface of the water. By the action of the wind (either direct or indirect) these contaminations become concentrated in strips or streaks. The first phenomenon consists in a longitudinal concentration, a streak pattern being formed parallel to the direction of the wind; it has already been the subject of several investigat ions 2). By the other phenomenon elongated concentrations are produced transversely to the wind direction. I. The longitudinal phenomenon: foam streaks, lines of smooth water. When strong winds blow there appeal' streaks of foam on the water surface, running parallel to the direction of the wind. Usually these streaks do not continue very far: they soon split up in two, or combine with each other, or interfingel'. Nor, as a rule, do the distances bet ween these streaks present much regularity. -

A Novel Sea Surface Roughness Parameterization Based on Wave State and Sea Foam
Journal of Marine Science and Engineering Article A Novel Sea Surface Roughness Parameterization Based on Wave State and Sea Foam Difu Sun 1,2 , Junqiang Song 1,2, Xiaoyong Li 1,2,* , Kaijun Ren 1,2 and Hongze Leng 1,2 1 College of Meteorology and Oceanography, National University of Defense Technology, Changsha 410073, China; [email protected] (D.S.); [email protected] (J.S.); [email protected] (K.R.); [email protected] (H.L.) 2 College of Computer Science and Technology, National University of Defense Technology, Changsha 410073, China * Correspondence: [email protected] Abstract: A wave state related sea surface roughness parameterization scheme that takes into account the impact of sea foam is proposed in this study. Using eight observational datasets, the performances of two most widely used wave state related parameterizations are examined under various wave conditions. Based on the different performances of two wave state related parameterizations under different wave state, and by introducing the effect of sea foam, a new sea surface roughness parameterization suitable for low to extreme wind conditions is proposed. The behaviors of drag coefficient predicted by the proposed parameterization match the field and laboratory measurements well. It is shown that the drag coefficient increases with the increasing wind speed under low and moderate wind speed conditions, and then decreases with increasing wind speed, due to the effect of sea foam under high wind speed conditions. The maximum values of the drag coefficient are reached when the 10 m wind speeds are in the range of 30–35 m/s. -

A Study on Distribution of Fungi in Sea Foams in Estuarine Ecosystem 1M.Ravikumar* and 2T
Int.J.Curr.Microbiol.App.Sci (2012) 1(1):63-65 ISSN: 2319-7706 Volume 1 Number 1 (2012) pp.63 65 Short Communication A study on distribution of fungi in sea foams in estuarine ecosystem 1M.Ravikumar* and 2T. Sivakumar 1Department of Plant Biology and Biotechnology, Govt. Arts College for Men, Nandhanam, Chennai, Tamilnadu, India. 2Department of Microbiology, Kanchi shri Krishna College of Arts & Science Kilambi, Kancheepuram, Tamilnadu, India- 631 551. *Corresponding author: [email protected] A B S T R A C T K E Y W O R D S The present study was carried out in Muthupet habitat along the east coast of Tamil Mangroves; Nadu. The sea foams were collected and fungal species isolated by plating and marine and marine direct observation techniques. Totally 64 species of fungi were isolated of which 48 fungi; by plating and 29 by direct observation techniques. The marine fungi like direct and dilution Halosphaeira maririma, Didymosphaeria maritima, Varicosporina ramulosa and technique; Pleospoara aquatica were also isolated. Aspergillus was the common genus direct observation. followed by Drechslera, Alternaria and Curvularia. Introduction Materials and Methods In an estuarine system, the distribution of fungi in sea foams through tidal waves plays an important role in The present study has been undertaken in Muthupet mangrove litter decomposition, total productivity and mangroves, a coastal deltaic habitat along the east coast energy cycles. Appendaged Ascospores, Basidiospores of Palk Strait, Bay of Bengal in Tiruvarur district, and tetraradiate conidia are frequently found in sea Tamil Nadu, India. Sea foams were collected near the foams along sandy shores, mostly together with algae edges of the land surface by scooping them into and protozoa (Schlichting, 1971). -

Replacing Open Channel with Pipe Channel and Flap Gate to Avoid Foam Formation at Outfall of Angamos Power Plant, Chile
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Vibroengineering PROCEDIA Replacing open channel with pipe channel and flap gate to avoid foam formation at outfall of Angamos Power Plant, Chile H. Kim1, K. S. Park2, D. H. Hwang3 1, 3Department of Civil and Environmental Engineering, Kookmin University, 861-1 Jeongneung-Dong, Seongbuk-Gu, Seoul, Korea 2Research and Engineering Division, R&D CENTRE, POSCO E&C, Incheon, 406-840, South Korea 3Corresponding author E-mail: [email protected], [email protected], [email protected] (Accepted 1 May 2014) Abstract. Pipe flow is designed to avoid sea foam formation at a power plant outfall at Angamos, Chile, instead of present open channel. A flap gate is designed at the end of the pipe to control variable high pressure caused by large head difference between sea level and ground level of the power plant constructed by POSCO in 2003. Present open channel is 14 m long over sloped ground from the plant. The foam is formed by air entrainment from free surface with high disturbance. Flap gate counter-weight is a function of the flap gate gap, and should be well chosen to have adequate opening water head, and allow both normal and emergency-operational flow fluxes. Natural oscillation frequency of the flap gate due to interaction with water pressure and frequency of fluid eddy shedding should not amplify unexpected motion. Laboratory experiments were carried out to find out optimal shape and weight of flap gate for this pipe flow. Long pipeline was represented as a vertical column considering experimental space. -
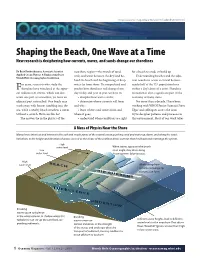
Shaping the Beach, One Wave at a Time New Research Is Deciphering How Currents, Waves, and Sands Change Our Shorelines
http://oceanusmag.whoi.edu/v43n1/raubenheimer.html Shaping the Beach, One Wave at a Time New research is deciphering how currents, waves, and sands change our shorelines By Britt Raubenheimer, Associate Scientist nearshore region—the stretch of sand, for a beach to erode or build up. Applied Ocean Physics & Engineering Dept. rock, and water between the dry land be- Understanding beaches and the adja- Woods Hole Oceanographic Institution hind the beach and the beginning of deep cent nearshore ocean is critical because or years, scientists who study the water far from shore. To comprehend and nearly half of the U.S. population lives Fshoreline have wondered at the appar- predict how shorelines will change from within a day’s drive of a coast. Shoreline ent fickleness of storms, which can dev- day to day and year to year, we have to: recreation is also a significant part of the astate one part of a coastline, yet leave an • decipher how waves evolve; economy of many states. adjacent part untouched. One beach may • determine where currents will form For more than a decade, I have been wash away, with houses tumbling into the and why; working with WHOI Senior Scientist Steve sea, while a nearby beach weathers a storm • learn where sand comes from and Elgar and colleagues across the coun- without a scratch. How can this be? where it goes; try to decipher patterns and processes in The answers lie in the physics of the • understand when conditions are right this environment. Most of our work takes A Mess of Physics Near the Shore Many forces intersect and interact in the surf and swash zones of the coastal ocean, pushing sand and water up, down, and along the coast. -
Stampin' Up!© Designer Series Paper Coordinating Colors
STAMPIN' UP!© DESIGNER SERIES PAPER COORDINATING COLORS Sorted alphabetically by DSP name Includes most DSP colors since 2008 DSP NAME COORDINATING CARDSTOCK COLORS CATALOGS APPEARED IN A Little Foxy Stack Basic Black, Calypso Coral, Pool Party, Smoky Slate, Whisper White 2016-17 Annual Catalog Adventure Bound Basic Gray, Cajun Craze, Early Espresso, Island Indigo, Mossy Meadow, Sahara Sand, Whisper White 2015 Occasions Catalog Crumb Cake, Copper, Cucumber Crush, Daffodil Delight, Mint Macaron, Night of Navy, Watermelon Affectionately Yours Specialty 2016-17 Annual Catalog Wonder Afternoon Picnic Basic Gray, Coastal Cabana, Crushed Curry, Pear Pizzazz, Soft Suede, Very Vanilla, Wisteria Wonder 2013-14 Annual Catalog Afternoon Tea Chocolate Chip, Groovy Guava, Soft Sky, Wild Wasabi 2008 Occasions Catalog Blushing Bride, Daffodil Delight, Island Indigo, Lost Lagoon, Mossy Meadow, Pistachio Pudding, All Abloom Stack 2014-15 Annual Catalog Strawberry Slush, Whisper White Call Me Clover, Cherry Cobbler, Crumb Cake, Garden Green, gold, Real Red, Shaded Spruce, Whisper All is Bright 2018 Holiday Catalog White All is Calm Lost Lagoon, Pear Pizzazz, Smoky Slate, Soft Sky, Whisper White 2014-15 Holiday Catalog All My Love Balmy Blue, Crumb Cake, Flirty Flamingo, Lovely Lipstick, Soft Sea Foam, Whisper White 2019 Occasions Catalog Basic Black, Berry Burst, Call Me Clover, Calypso Coal, Crumb Cake, Crushed Curry, Lemon Lime Animal Expedition 2018-19 Annual Catalog Twist, Melon Mambo, Pool Party, Poppy Parade, Shaded Spruce, Whisper White Bermuda -

Floridas Living Beaches a Guide for the Curious Beachcomber 1St Edition Pdf, Epub, Ebook
FLORIDAS LIVING BEACHES A GUIDE FOR THE CURIOUS BEACHCOMBER 1ST EDITION PDF, EPUB, EBOOK Blair Witherington | 9781561643868 | | | | | Floridas Living Beaches A Guide for the Curious Beachcomber 1st edition PDF Book Florida Ghost Stories. Friend Reviews. Florida's Living Beaches. It heralds the living things and metaphorical life along the state's miles of sandy beaches. Frank Drummond rated it it was amazing May 12, Swash and backwash, sea foam, dunes, ripples, offshore bars and wrack lines are just some of the aspects that are discussed. Johnette marked it as to-read Jan 29, Other editions. Each illustration features some of Florida's This is invaluable, for example, with birds that have different coloring for gender or season. He has contributed numerous scientific articles and book chapters on sea turtle biology, and his books include two volumes on sea turtles and their conservation. Average rating 4. Terrific book that is similar to the Witherington's other book about seashells, but it also includes beach side creatures, plants, and helped us identify things like the sooty sea hare that had climbed out on shore but swam away not long after. Average rating 4. Kathleen Harrigan rated it really liked it Feb 01, Details if other :. In addition to being an identification guide, the book reveals much of the wonder and mystery between dune and sea along Florida's long coastline. The expanded second edition now identifies and explains over curiosities, with lavishly illustrated accounts organized into Beach Features, Beach Animals, Beach Plants, Beach Minerals, and Hand of Man. You'll find dolphins, turtles, herons, and more as you travel through natural Florida with this beautiful selection of drawings by Julie Burch.