1 IEOR 6711: Continuous-Time Markov Chains
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Queueing Network Analyzer
THE BELL SYSTEM TECHNICAL JOURNAL Vol. 62, No.9, November 1983 Printed in U.S.A. The Queueing Network Analyzer By W. WHITT* (Manuscript received March 11, 1983) This paper describes the Queueing Network Analyzer (QNA), a software package developed at Bell Laboratories to calculate approximate congestion measures for a network of queues. The first version of QNA analyzes open networks of multiserver nodes with the first-come, first-served discipline and no capacity constraints. An important feature is that the external arrival processes need not be Poisson and the service-time distributions need not be exponential. Treating other kinds of variability is important. For example, with packet-switchedcommunication networks we need to describe the conges tion resulting from bursty traffic and the nearly constant service times of packets. The general approach in QNA is to approximately characterize the arrival processes by two or three parameters and then analyze the individual nodes separately. The first version of QNA uses two parameters to characterize the arrival processes and service times, one to describe the rate and the other to describe the variability. The nodes are then analyzed as standard GI/G/m queues partially characterized by the first two moments of the interarrival time and service-time distributions. Congestion measures for the network as a whole are obtained by assuming as an approximation that the nodes are stochastically independent given the approximate flow parameters. I. INTRODUCTION AND SUMMARY Networks of queues have proven to be useful models to analyze the performance of complex systems such as computers, switching ma chines, communications networks, and production job shOpS.1-7 To facilitate the analysis of these models, several software packages have * Bell Laboratories. -

M/M/C Queue with Two Priority Classes
Submitted to Operations Research manuscript (Please, provide the mansucript number!) M=M=c Queue with Two Priority Classes Jianfu Wang Nanyang Business School, Nanyang Technological University, [email protected] Opher Baron Rotman School of Management, University of Toronto, [email protected] Alan Scheller-Wolf Tepper School of Business, Carnegie Mellon University, [email protected] This paper provides the first exact analysis of a preemptive M=M=c queue with two priority classes having different service rates. To perform our analysis, we introduce a new technique to reduce the 2-dimensionally (2D) infinite Markov Chain (MC), representing the two class state space, into a 1-dimensionally (1D) infinite MC, from which the Generating Function (GF) of the number of low-priority jobs can be derived in closed form. (The high-priority jobs form a simple M=M=c system, and are thus easy to solve.) We demonstrate our methodology for the c = 1; 2 cases; when c > 2, the closed-form expression of the GF becomes cumbersome. We thus develop an exact algorithm to calculate the moments of the number of low-priority jobs for any c ≥ 2. Numerical examples demonstrate the accuracy of our algorithm, and generate insights on: (i) the relative effect of improving the service rate of either priority class on the mean sojourn time of low-priority jobs; (ii) the performance of a system having many slow servers compared with one having fewer fast servers; and (iii) the validity of the square root staffing rule in maintaining a fixed service level for the low priority class. -

Product-Form in Queueing Networks
Product-form in queueing networks VRIJE UNIVERSITEIT Product-form in queueing networks ACADEMISCH PROEFSCHRIFT ter verkrijging van de graad van doctor aan de Vrije Universiteit te Amsterdam, op gezag van de rector magnificus dr. C. Datema, hoogleraar aan de faculteit der letteren, in het openbaar te verdedigen ten overstaan van de promotiecommissie van de faculteit der economische wetenschappen en econometrie op donderdag 21 mei 1992 te 15.30 uur in het hoofdgebouw van de universiteit, De Boelelaan 1105 door Richardus Johannes Boucherie geboren te Oost- en West-Souburg Thesis Publishers Amsterdam 1992 Promotoren: prof.dr. N.M. van Dijk prof.dr. H.C. Tijms Referenten: prof.dr. A. Hordijk prof.dr. P. Whittle Preface This monograph studies product-form distributions for queueing networks. The celebrated product-form distribution is a closed-form expression, that is an analytical formula, for the queue-length distribution at the stations of a queueing network. Based on this product-form distribution various so- lution techniques for queueing networks can be derived. For example, ag- gregation and decomposition results for product-form queueing networks yield Norton's theorem for queueing networks, and the arrival theorem implies the validity of mean value analysis for product-form queueing net- works. This monograph aims to characterize the class of queueing net- works that possess a product-form queue-length distribution. To this end, the transient behaviour of the queue-length distribution is discussed in Chapters 3 and 4, then in Chapters 5, 6 and 7 the equilibrium behaviour of the queue-length distribution is studied under the assumption that in each transition a single customer is allowed to route among the stations only, and finally, in Chapters 8, 9 and 10 the assumption that a single cus- tomer is allowed to route in a transition only is relaxed to allow customers to route in batches. -
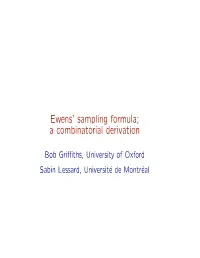
Ewens' Sampling Formula
Ewens’ sampling formula; a combinatorial derivation Bob Griffiths, University of Oxford Sabin Lessard, Universit´edeMontr´eal Infinitely-many-alleles-model: unique mutations ......................................................................................................... •. •. •. ............................................................................................................ •. •. .................................................................................................... •. •. •. ............................................................. ......................................... .............................................. •. ............................... ..................... ..................... ......................................... ......................................... ..................... • ••• • • • ••• • • • • • Sample configuration of alleles 4 A1,1A2,4A3,3A4,3A5. Ewens’ sampling formula (1972) n sampled genes k b Probability of a sample having types with j types represented j times, jbj = n,and bj = k,is n! 1 θk · · b b 1 1 ···n n b1! ···bn! θ(θ +1)···(θ + n − 1) Example: Sample 4 A1,1A2,4A3,3A4,3A5. b1 =1, b2 =0, b3 =2, b4 =2. Old and New lineages . •. ............................... ......................................... •. .............................................. ............................... ............................... ..................... ..................... ......................................... ..................... ..................... ◦ ◦◦◦◦◦ n1 n2 nm nm+1 -

Copyrighted Material
Index alternating renewal process, 353, 354 reflection principle, 474 scaling invariance, 471 Bayes rule, 23, 28 simulation, 480 Bernoulli process, 228, 293, 301–305, 309, 316 time invariance, 472 beta function, 60, 170, 265 Buffon’s needle problem, 83, 94 birth and catastrophe chain, 377 birth and death chain, 375, 392 Cauchy–Bunyakovsky–Schwarz inequality, 135, birthday problem, 30–31 137, 143, 149 Black–Karasinski model, 509 Central Limit Theorem, 2, 87, 92, 241, Blackwell renewal theorem, 346, 348 244, 245, 273, 282, 302, 342, 343, block replacement policy, 344 482, 523 Borel–Cantelli lemmas, 34–142, 224, 304 DeMoivre-Laplace version, 151 bounded convergence theorem, 131, 251, 422, changing the order of derivation and integra- 448, 455 tion, 243 branching process, 363, 366, 368, 441, 461 Chapman-Kolmogorov equation, 378, 379, 381, Brownian bridge, 483 389, 420 Brownian motion conditional distribution, 468 characteristic function, 192–194 covariance structure,COPYRIGHTED 471 MATERIALcontinuity theorem, 203 definition, 467 examples, 194–199 drift, 471 multivariate random vector, 194 examples, 468, 471 properties, 193 generation, 176 uniqueness, 200 hitting time, 475, 476 characterization theorem for convergence in dis- multidimensional, 473 tribution, 218 quadratic variation, 478 Cholesky decomposition, 174–176, 514 547 Probability and Stochastic Processes, First Edition. Ionut¸Florescu C 2015 John Wiley & Sons, Inc. Published 2015 by John Wiley & Sons, Inc. 548 INDEX CIR model, 507 Darboux sums, 349 moments, 510, 511 De Morgan laws, -

Matrix Geometric Approach for Random Walks
Matrix geometric approach for random walks Citation for published version (APA): Kapodistria, S., & Palmowski, Z. B. (2017). Matrix geometric approach for random walks: stability condition and equilibrium distribution. Stochastic Models, 33(4), 572-597. https://doi.org/10.1080/15326349.2017.1359096 Document license: CC BY-NC-ND DOI: 10.1080/15326349.2017.1359096 Document status and date: Published: 02/10/2017 Document Version: Publisher’s PDF, also known as Version of Record (includes final page, issue and volume numbers) Please check the document version of this publication: • A submitted manuscript is the version of the article upon submission and before peer-review. There can be important differences between the submitted version and the official published version of record. People interested in the research are advised to contact the author for the final version of the publication, or visit the DOI to the publisher's website. • The final author version and the galley proof are versions of the publication after peer review. • The final published version features the final layout of the paper including the volume, issue and page numbers. Link to publication General rights Copyright and moral rights for the publications made accessible in the public portal are retained by the authors and/or other copyright owners and it is a condition of accessing publications that users recognise and abide by the legal requirements associated with these rights. • Users may download and print one copy of any publication from the public portal for the purpose of private study or research. • You may not further distribute the material or use it for any profit-making activity or commercial gain • You may freely distribute the URL identifying the publication in the public portal. -

On a Fractional Alternating Poisson Process
AIMS Mathematics, 1(3): 212-224 DOI:10.3934/Math.2016.3.212 Received: 5 September 2016 Accepted: 12 September 2016 http://www.aimspress.com/journal/Math Published: 20 September 2016 Research article On a fractional alternating Poisson process Antonio Di Crescenzo∗and Alessandra Meoli Department of Mathematics, University of Salerno, Via Giovanni Paolo II, 132, 84084 Fisciano (SA), Italy ∗ Correspondence: Email: [email protected]; Tel: +39 089 96 3349; Fax: +39 089 96 3303. Abstract: We propose a generalization of the alternating Poisson process from the point of view of fractional calculus. We consider the system of differential equations governing the state probabilities of the alternating Poisson process and replace the ordinary derivative with the fractional derivative (in the Caputo sense). This produces a fractional 2-state point process. We obtain the probability mass function of this process in terms of the (two-parameter) Mittag-Leffler function. Then we show that it can be recovered also by means of renewal theory. We study the limit state probability, and certain proportions involving the fractional moments of the sub-renewal periods of the process. In conclusion, in order to derive new Mittag-Leffler-like distributions related to the considered process, we exploit a transformation acting on pairs of stochastically ordered random variables, which is an extension of the equilibrium operator and deserves interest in the analysis of alternating stochastic processes. Keywords: Caputo derivative; Mittag-Leffler function; fractional process; alternating process; renewal process; renewal function 1. Introduction Extension of continuous-time point processes to the fractional case has been a major topic in liter- ature for several years. -

Optimal Surplus Capacity Utilization in Polling Systems Via Fluid Models
Optimal Surplus Capacity Utilization in Polling Systems via Fluid Models Ayush Rawal, Veeraruna Kavitha and Manu K. Gupta Industrial Engineering and Operations Research, IIT Bombay, Powai, Mumbai - 400076, India E-mail: ayush.rawal, vkavitha, manu.gupta @iitb.ac.in Abstract—We discuss the idea of differential fairness in polling while maintaining the QoS requirements of primary customers. systems. One such example scenario is: primary customers One can model this scenario with polling systems, when it demand certain Quality of Service (QoS) and the idea is to takes non-zero time to switch the services between the two utilize the surplus server capacity to serve a secondary class of customers. We use achievable region approach for this. Towards classes of customers. Another example scenario is that of data this, we consider a two queue polling system and study its and voice users utilizing the same wireless network. In this ‘approximate achievable region’ using a new class of delay case, the network needs to maintain the drop probability of priority kind of schedulers. We obtain this approximate region, the impatient voice customers (who drop calls if not picked-up via a limit polling system with fluid queues. The approximation is within a negligible waiting times) below an acceptable level. accurate in the limit when the arrival rates and the service rates converge towards infinity while maintaining the load factor and Alongside, it also needs to optimize the expected sojourn times the ratio of arrival rates fixed. We show that the set of proposed of the data calls. schedulers and the exhaustive schedulers form a complete class: Polling systems can be categorized on the basis of different every point in the region is achieved by one of those schedulers. -

AN EXTENSION of the MATRIX-ANALYTIC METHOD for M/G/1-TYPE MARKOV PROCESSES 1. Introduction We Consider a Bivariate Markov Proces
Journal of the Operations Research Society of Japan ⃝c The Operations Research Society of Japan Vol. 58, No. 4, October 2015, pp. 376{393 AN EXTENSION OF THE MATRIX-ANALYTIC METHOD FOR M/G/1-TYPE MARKOV PROCESSES Yoshiaki Inoue Tetsuya Takine Osaka University Osaka University Research Fellow of JSPS (Received December 25, 2014; Revised May 23, 2015) Abstract We consider a bivariate Markov process f(U(t);S(t)); t ≥ 0g, where U(t)(t ≥ 0) takes values in [0; 1) and S(t)(t ≥ 0) takes values in a finite set. We assume that U(t)(t ≥ 0) is skip-free to the left, and therefore we call it the M/G/1-type Markov process. The M/G/1-type Markov process was first introduced as a generalization of the workload process in the MAP/G/1 queue and its stationary distribution was analyzed under a strong assumption that the conditional infinitesimal generator of the underlying Markov chain S(t) given U(t) > 0 is irreducible. In this paper, we extend known results for the stationary distribution to the case that the conditional infinitesimal generator of the underlying Markov chain given U(t) > 0 is reducible. With this extension, those results become applicable to the analysis of a certain class of queueing models. Keywords: Queue, bivariate Markov process, skip-free to the left, matrix-analytic method, reducible infinitesimal generator, MAP/G/1 queue 1. Introduction We consider a bivariate Markov process f(U(t);S(t)); t ≥ 0g, where U(t) and S(t) are referred to as the level and the phase, respectively, at time t. -

BUSF 40901-1/CMSC 34901-1: Stochastic Performance Modeling Winter 2014
BUSF 40901-1/CMSC 34901-1: Stochastic Performance Modeling Winter 2014 Syllabus (January 15, 2014) Instructor: Varun Gupta Office: 331 Harper Center e-mail: [email protected] Phone: 773-702-7315 Office hours: by appointment Class Times: Wed, Fri { 10:10-11:30 am { Harper Center (3A) Final Exam (tentative): March 21, Friday { 8:00-11:00am { Harper Center (3A) Course Website: http://chalk.uchicago.edu Course Objectives This is an introductory course in queueing theory and performance modeling, with applications including but not limited to service operations (healthcare, call centers) and computer system resource management (from datacenter to kernel level). The aim of the course is two-fold: 1. Build insights into best practices for designing service systems (How many service stations should I provision? What speed? How should I separate/prioritize customers based on their service requirements?) 2. Build a basic toolbox for analyzing queueing systems in particular and stochastic processes in general. Tentative list of topics: Open/closed queueing networks; Operational laws; M=M=1 queue; Burke's theorem and reversibility; M=M=k queue; M=G=1 queue; G=M=1 queue; P h=P h=k queues and their solution using matrix-analytic methods; Arrival theorem and Mean Value Analysis; Analysis of scheduling policies (e.g., Last-Come-First Served; Processor Sharing); Jackson network and the BCMP theorem (product form networks); Asymptotic analysis (M=M=k queue in heavy/light traf- fic, Supermarket model in mean-field regime) Prerequisites Exposure to undergraduate probability (random variables, discrete and continuous probability dis- tributions, discrete time Markov chains) and calculus is required. -

3 Lecture 3: Queueing Networks and Their Fluid and Diffusion Approximation
3 Lecture 3: Queueing Networks and their Fluid and Diffusion Approximation • Fluid and diffusion scales • Queueing networks • Fluid and diffusion approximation of Generalized Jackson networks. • Reflected Brownian Motions • Routing in single class queueing networks. • Multi class queueing networks • Stability of policies for MCQN via fluid • Optimization of MCQN — MDP and the fluid model. • Formulation of the fluid problem for a MCQN 3.1 Fluid and diffusion scales As we saw, queues can only be studied under some very detailed assumptions. If we are willing to assume Poisson arrivals and exponetial service we get a very complete description of the queuing process, in which we can study almost every phenomenon of interest by analytic means. However, much of what we see in M/M/1 simply does not describe what goes on in non M/M/1 systems. If we give up the assumption of exponential service time, then it needs to be replaced by a distribution function G. Fortunately, M/G/1 can also be analyzed in moderate detail, and quite a lot can be said about it which does not depend too much on the detailed form of G. In particular, for the M/G/1 system in steady state, we can calculate moments of queue length and waiting times in terms of the same moments plus one of the distribution G, and so we can evaluate performance of M/G/1 without too many details on G, sometimes 2 E(G) and cG suffice. Again, behavior of M/G/1 does not describe what goes on in GI/G/1 systems. -

EE414 - Birth-Death Processes 1/17 Birth-Death Processes
Birth-Death Processes Birth-Death Processes: Transient Solution Poisson Process: State Distribution Poisson Process: Inter-arrival Times Dr Conor McArdle EE414 - Birth-Death Processes 1/17 Birth-Death Processes Birth-Death Processes are Markov chains where transitions are allowed only between neighbouring states of the process. They may be discrete- or continuous-time. Our primary interest is in the continuous-time case. Birth-Death processes are used to simplify the analysis of systems that see random arrivals and departures of customers (packets, requests, or calls etc.) over time. We will develop results that are useful for performance evaluation of servers (or transmission lines) with associated input queues. The results also apply to circuit switches with limited numbers of outgoing channels. We start in this section by seeking the transient solution to the Birth-Death system. Recall that the general transient solution π(t) of a continuous-time Markov chain is given implicitly by π_ (t) = π(t)Q where Q is the matrix of state transition-rates between each pair of states in the process. The Birth-Death assumption imposes a certain structure on Q which gives the solution π(t) a simplified form. Dr Conor McArdle EE414 - Birth-Death Processes 2/17 Birth-Death Processes: Transition-rates Consider the state transition-rate diagram of the general Birth-Death process below. ë0 ë1 ëk-1 ëk 0 1 2 k-1 k k+1 ì1 ì2 ìk ìk+1 The states of the process are represented by numbered circles, the number indicating the state. For a birth-death process this number represents the number of individuals in the population, which for our purposes we interpret as the number of packets (or requests or calls) in the system.