AGGREGATION in COLLOIDS and AEROSOLS by FLINT G
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Physics Department Newsletter February 2015
PHYSICS DEPARTMENT NEWSLETTER FEBRUARY 2015 ON THE MOVE Physics student combines science and dance to teach new concepts Scientific exploration is growing by leaps, in the university’s 2014 SpringDance, and also the molecules — or dancers — reacted in bounds and pirouettes thanks to a Kansas acted as a liaison between the two disciplines. certain ways. “I could see them absorbing it,” State University undergraduate student. “I don’t see either field as deeply as the Phillips said. “I’ve heard them tell each other, Daniel Phillips, senior in physics and nuclear experts, but I know enough about each that ‘we turn this way because,’ and explain the engineering, Kaiser, Oregon, is using his I can guide them toward the middle,” Phillips science correctly. If you can teach people dual interests in physics and dance to help said. The second act was polished before the science in a way that relates to their interests, performers discover scientific concepts. “The 2014 WinterDance performance. Phillips has it’s a powerful tool.” Phillips added that one personality of a performer is not necessarily transitioned from a performer to a rehearsal of the best ways in which to learn is to teach conducive to sitting in a lecture hall and assistant, helping dancers with techniques. the subject to someone else. In his research, getting talked at about physics,” Phillips said. Additionally, Phillips has begun his own it’s twofold — not only is he deepening his “I wanted to see if there was a viable way to research using the ballet as a method to teach physics knowledge by teaching the dancers, teach science through performance art to physics to the dancers. -

College of Arts & Sciences
COLLEGE OF ARTS & SCIENCES ACHIEVEMENTS AND HIGHLIGHTS September 2014 Summary Sheet Traci Brimhall, English, reading of 6 new poems at Poet Lore’s 125th Anniversary Reading at the Folger Shakespeare Library in Washington D.C., 15 Sept. 2014. Link: http://www.folger.edu/wosummary.cfm?woid=951 Slawomir Dobrzanski, School of Music, Theatre, and Dance, presented a Lecture-recital “Chopin before Chopin: Inspirations and Influences” at the Polish Academy of Sciences, Paris Branch, Paris, France where he also performed a piano recital at the Polish Library in Paris. Dr. Dobrzanski also performed a piano recital on the “Great Spaces” Recital Series at Grace Cathedral in Topeka, Kansas. Bimal Paul was named Head of Delegation for the 10-member delegation from the Association of American Geographers who will attend the Twentieth session of the Conference of the Parties (COP 20) of the United Nations Framework Convention on Climate Change (UNFCCC) in Lima, Peru between 1 and 12 December, 2014. Bell, Sam R and Michael Flynn, Political Science, (with Colin Barry, Univ of Oklahoma; K. Chad Clay, Univ. of Georgia; and Amanda Murdie, Univ of Missouri) Accepted and Forthcoming. “Choosing the Best House in a Bad Neighborhood: Location Strategies of Human Rights INGOs in the Non-Western World.” International Studies Quarterly. 58 (1): 187-198. ISQ is ranked 10th among all political science journals (Giles and Garrand 2007; Garrand et al 2009). ISQ is the flagship journal of the International Studies Association, the foremost association for political science scholars in the subfield of international relations. No K-State political science professor had been published in this prestigious outlet over the first forty years of the department’s history, from 1965 to 2005. -
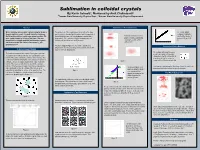
Sublimation in Colloidal Crystals by Kevin Schoelz1, Mentored by Amit Chakrabarti2 1Truman State University Physics Dept., 2Kansas State University Physics Department
Sublimation in colloidal crystals By Kevin Schoelz1, Mentored by Amit Chakrabarti2 1Truman State University Physics Dept., 2Kansas State University Physics Department Abstract Sublimation in Three Dimensions 4 y = 0.6361x + 1.0062 R2 = 0.9722 We are studying colloid polymer systems using the Asakura- The parameters of the simulatjon are xi, the ratio of the large 3.5 The crystal exhibits 3 scaling as it sublimates Oosawa depletion model. For small interaction distances, particle radius to the small particle radius, and the magnitude of m Nm vs t Linear (Nm vs t) To the left and below are four Log(N the AO model exhibits a crystal to gas phase transition. We the well depth in terms of kT (the boltzmann constant and a 2.5 such that the number of used crystals formed by colloids of two sizes. The were temperature). The crystals used in this simulation were all graphs showing a sublimating monomers N goes like 2 m then placed into a higher potential field where the began to formed under the influence of a 4kT potential. crystal at t=0, t=50, t=5000 t2/3. 1.5 1.5 2 2.5 3 3.5 4 4.5 5 and t=10000. Log(t) sublimate, such that the number of monomers Nm was proportional to t2/3. The phase diagram(Figure 3) relies on three parameters: Conclusions/Future Research temperature, the interaction range of the potential and volume Asakura-Oosawa Potential fraction of the colloidal particles. The scaling relationship from above The Asakura-Oosawa model consists of two types of particles. -
Department of Computer Science Activity 1998-2004
Dartmouth College Dartmouth Digital Commons Computer Science Technical Reports Computer Science 3-20-2005 Department of Computer Science Activity 1998-2004 David Kotz Dartmouth College Follow this and additional works at: https://digitalcommons.dartmouth.edu/cs_tr Part of the Computer Sciences Commons Dartmouth Digital Commons Citation Kotz, David, "Department of Computer Science Activity 1998-2004" (2005). Computer Science Technical Report TR2005-534. https://digitalcommons.dartmouth.edu/cs_tr/267 This Technical Report is brought to you for free and open access by the Computer Science at Dartmouth Digital Commons. It has been accepted for inclusion in Computer Science Technical Reports by an authorized administrator of Dartmouth Digital Commons. For more information, please contact [email protected]. Department of Computer Science Activity 1998–2004 David Kotz (editor) [email protected] Technical Report TR2005-534 Department of Computer Science, Dartmouth College http://www.cs.dartmouth.edu March 20, 2005 1 Contents 1 Introduction 1 2 Courses 2 3 Information Retrieval (Javed Aslam, Daniela Rus) 4 3.1 Activities and Findings ....................................... 4 3.1.1 Mobile agents for information retrieval. .......................... 4 3.1.2 Automatic information organization ............................ 4 3.1.3 Metasearch ......................................... 5 3.1.4 Metasearch, Pooling, and System Evaluation ....................... 6 3.2 Products ............................................... 7 3.3 -

Sixth Microgravity Fluid Physics and Transport Phenomena Conference Abstracts
NASA/TM--2002-211211 Sixth Microgravity Fluid Physics and Transport Phenomena Conference Abstracts August 2002 The NASA STI Program Office... in Profile Since its founding, NASA has been dedicated to CONFERENCE PUBLICATION. Collected the advancement of aeronautics and space papers from scientific and technical science. The NASA Scientific and Technical conferences, symposia, seminars, or other Information (STI) Program Office plays a key part meetings sponsored or cosponsored by in helping NASA maintain this important role. NASA. The NASA STI Program Office is operated by SPECIAL PUBLICATION. Scientific, Langley Research Center, the Lead Center for technical, or historical information from NASA's scientific and technical information. The NASA programs, projects, and missions, NASA STI Program Office provides access to the often concerned with subjects having NASA STI Database, the largest collection of substantial public interest. aeronautical and space science STI in the world. The Program Office is also NASA's institutional TECHNICAL TRANSLATION. English- mechanism for disseminating the results of its language translations of foreign scientific research and development activities. These results and technical material pertinent to NASA's are published by NASA in the NASA STI Report mission. Series, which includes the following report types: Specialized services that complement the STI TECHNICAL PUBLICATION. Reports of Program Office's diverse offerings include completed research or a major significant creating custom thesauri, building customized phase of research that present the results of data bases, organizing and publishing research NASA programs and include extensive data results.., even providing videos. or theoretical analysis. Includes compilations of significant scientific and technical data and For more information about the NASA STI information deemed to be of continuing Program Office, see the following: reference value. -

Systems Science for Physical Geometric Algorithms Final Report for EIA-9802068
Systems Science for Physical Geometric Algorithms Final Report for EIA-9802068 David Kotz (PI), David Nicol, Bruce Donald, Dan Rockmore dfk AT dartmouth.edu Department of Computer Science, Dartmouth College http://www.cs.dartmouth.edu March 13, 2005 1 Contents 1 Introduction 1 2 Faculty 2 3 Information Retrieval (Javed Aslam, Daniela Rus) 3 3.1 Activities and Findings ....................................... 3 3.1.1 Mobile agents for information retrieval. .......................... 3 3.1.2 Automatic information organization ............................ 3 3.1.3 Metasearch ......................................... 4 3.1.4 Metasearch, Pooling, and System Evaluation ....................... 5 3.2 Products ............................................... 6 3.3 Contributions ............................................ 7 4 Algorithms and Theory (Amit Chakrabarti) 9 4.1 Activities and Findings ....................................... 9 4.1.1 Research .......................................... 9 4.1.2 Teaching .......................................... 9 4.1.3 Outreach Activities ..................................... 9 4.2 Products ............................................... 10 4.3 Contributions ............................................ 10 5 Out-of-Core Computing (Thomas Cormen) 11 5.1 Activities and Findings ....................................... 11 5.2 Products ............................................... 14 5.3 Contributions ............................................ 16 6 Computational Biology (Bruce Donald) 17 6.1 Activities and -

Gelation in Aerosols; Non-Mean-Field Aggregation and Kinetics
NASA/CR—2008-215280 Gelation in Aerosols; Non-Mean-Field Aggregation and Kinetics C.M. Sorensen and A. Chakrabarti Kansas State University, Manhattan, Kansas August 2008 NASA STI Program . in Profi le Since its founding, NASA has been dedicated to the papers from scientifi c and technical advancement of aeronautics and space science. The conferences, symposia, seminars, or other NASA Scientifi c and Technical Information (STI) meetings sponsored or cosponsored by NASA. program plays a key part in helping NASA maintain this important role. • SPECIAL PUBLICATION. Scientifi c, technical, or historical information from The NASA STI Program operates under the auspices NASA programs, projects, and missions, often of the Agency Chief Information Offi cer. It collects, concerned with subjects having substantial organizes, provides for archiving, and disseminates public interest. NASA’s STI. The NASA STI program provides access to the NASA Aeronautics and Space Database and • TECHNICAL TRANSLATION. English- its public interface, the NASA Technical Reports language translations of foreign scientifi c and Server, thus providing one of the largest collections technical material pertinent to NASA’s mission. of aeronautical and space science STI in the world. Results are published in both non-NASA channels Specialized services also include creating custom and by NASA in the NASA STI Report Series, which thesauri, building customized databases, organizing includes the following report types: and publishing research results. • TECHNICAL PUBLICATION. Reports of For more information about the NASA STI completed research or a major signifi cant phase program, see the following: of research that present the results of NASA programs and include extensive data or theoretical • Access the NASA STI program home page at analysis. -

Simulation Studies on Shape and Growth Kinetics for Fractal Aggregates in Aerosol and Colloidal Systems
SIMULATION STUDIES ON SHAPE AND GROWTH KINETICS FOR FRACTAL AGGREGATES IN AEROSOL AND COLLOIDAL SYSTEMS by WILLIAM RAYMOND HEINSON B.S., Kansas State University, 2008 AN ABSTRACT OF A DISSERTATION submitted in partial fulfillment of the requirements for the degree DOCTOR OF PHILOSOPHY Department of Physics College of Arts and Science KANSAS STATE UNIVERSITY Manhattan, Kansas 2015 Abstract The aim of this work is to explore, using computational techniques that simulate the motion and subsequent aggregation of particles in aerosol and colloidal systems, many common but not well studied systems that form fractal clusters. Primarily the focus is on cluster shape and growth kinetics. The structure of clusters made under diffusion limited cluster-cluster aggregation (DLCA) is looked at. More specifically, the shape anisotropy is found to have an inverse relationship on the scaling prefactor k0 and have no effect on the fractal dimension Df. An analytical model that predicts the shape and fractal dimension of diffusion limited cluster- cluster aggregates is tested and successfully predicts cluster shape and dimensionality. Growth kinetics of cluster-cluster aggregation in the free molecular regime where the system starts with ballistic motion and then transitions to diffusive motion as the aggregates grow in size is studied. It is shown that the kinetic exponent will crossover from the ballistic to the diffusional values and the onset of this crossover is predicted by when the nearest neighbor Knudsen number reaches unity. Simulations were carried out for a system in which molten particles coalesce into spheres, then cool till coalescing stops and finally the polydispersed monomers stick at point contacts to form fractal clusters. -

Toni P"00E9rez
Toni Pérez Institute for Cross-Disciplinary Physics and Complex Systems Campus Universitat de les Illes Balears, Palma de Mallorca E-07122 Spain ResearcherID: G-6815-2011 Phone: +34 971 173 369 email: toni@ifisc.uib-csic.es url: http://www.ifisc.uib-csic.es/~toni Born: March 10, 1978—Jerez de la Frontera, Spain Nationality: Spanish Current position Postdoctoral Research Associate, Institute for Cross-Disciplinary Physics and Complex Sys- tems (IFISC) Areas of specialization Physics • Complex Systems • Nonlinear Dynamics • Computational Neuroscience • Bio- physics Education 2009 PhD in Physics, IFISC- Universitat de les Illes Balears, Palma de Mallorca. 2004 MSc in Physics, Universitat de Barcelona, Barcelona. Appointments held 2013-present Postdoctoral Research Associate at IFISC, Spain 2011-2012 Postdoctoral Research Associate at Newcastle University, Newcastle upon Tyne, UK 2009-2011 Postdoctoral Research Associate at Lehigh University, Bethlehem, USA 2005-2009 PhD Fellow at Intitute for Cross Disciplinary Physics and Complex Systems (IFISC), Palma de Mallorca, Spain Accreditations and Teaching 2012 Positive review from the National Spanish Agency for Quality and Accreditations (ANECA) for the positions of: Profesor Contratado Doctor (2012-210), Profesor Ayudante Doctor (2012-211) and Profesor de Universidad Privada (2012-212). 2011-2012 Teaching Assistant at University of Newcastle. Computational Analysis of Complex Biolog- ical Systems, Bioinformatics, MSc. 2006-2009 Teaching Assistant at University of Balearic Islands. Physics, Chemical Engineering Degree. 1 Participation in Research Projects 2009-2011 Kinetic Pathways to Phase Separation (DMR-0702890). National Science Foundation. IP: James D. Gunton. 2007-2009 Global Approach to Brain Activity: From Cognition to Disease (FP6-2005-NEST-Path- 043309). European Commision. -

Aerosol Gel Production Via Controlled Detonation of Liquid Precursors By
Aerosol Gel Production Via Controlled Detonation of Liquid Precursors by Sarah Elizabeth Gilbertson B.S., Kansas State University, 2006 A Thesis submitted in partial fulfillment of the requirements for the degree Master of Science Department of Physics College of Arts and Sciences Kansas State University Manhattan, Kansas 2008 Approved by: Major Professor Dr. Christopher M. Sorensen Abstract This work emphasizes advancements in Aerosol Gelation. We have attempted to expand the available materials used to synthesize Aerosol Gels by moving away from gas phase precursors toward liquid phase precursors and eventually reactants in the solid phase. The primary challenge was to efficiently administer the liquid fuels into the detonation chamber. After several attempts, it was concluded that the most efficient delivery technique was to heat the liquid fuel past the vapour point and evaporate it into the oxidizing gas for combustion. This method consistently yields soot with a density of 3.2 mg/cc approximately 10 minutes after the combustion. It was concluded that four criterion must be met to create an Aerosol Gel from a liquid: 1. The liquid must be as finely divided as possible 2. The energy of the spark must be large enough to cause a sustainable combustion 3. The fuel must have a Lower Explosive Limit above the necessary concentration to meet a volume fraction of 10−4 4. The fuel must have a relatively low boiling point Table of Contents Table of Contents iii List of Figuresv List of Tables vii Acknowledgements vii Dedication ix 1 Introduction1 1.1 Background On The Gelation Process . .1 1.2 Aerogels, Xerogels and Aerosol Gels . -

2019 Newsletter
PHYSICS DEPARTMENT NEWSLETTER March 2019 ARCHIBEQUE AWARDED FELLOWSHIP UPCOMING EVENTS Benjamin Archibeque, BS in Physics While at K-State, Archibeque partici- March 25, 2019 and Psychology, 2018, was one of pated in several undergraduate re- Nichols Lecture six K-State stu- search projects, including a meta- Joanna Behrman dents and two analysis of the impact of teaching alumni among methods and other institutional vari- Johns Hopkins the National ables on student learning in intro- Science Foun- ductory physics classes that used dation’s 2018 surveys from more than 50,000 stu- Graduate Re- dents. September 10, 2019 search Fellows Ben’s research was conducted un- Neff Lecture and honorable der the mentorship of Eleanor Sayre, Daniel Kennefick mentions. associate professor, through the De- University of Arkansas The fellowship veloping Scholars Program and the supports and Ronald E. McNair Baccalaureate recognizes outstanding students Achievement Program. conducting science, technology, October 7, 2019 engineering or mathematics re- Archibeque is currently a graduate search as they undertake master's student pursuing his doctorate in Peterson Lecture or doctoral degrees at accredited physics education research at Lincoln Carr Florida International University. U.S. institutions. Colorado School of Mines GREETINGS FROM THE DEPARTMENT HEAD It is a great pleasure to be writing to you. It has are they new; however, I can’t think of a depart- been far too long since our last newsletter in 2016 ment better placed to address them. Thanks to the and I would like to update you on your Physics De- continued support of my colleagues along with YOU, partment and extend greetings to all of you on our alumni and friends, I know that we can meet behalf of myself and my colleagues. -

Spring 2021 Commencement Program (Pdf)
Commencement Schedule Saturday, May 8, 2021 Sunday, May 16, 2021 6 91 Kansas State University Polytechnic Campus, College of Agriculture, 2020 and 2021 2020 and 2021 Bill Snyder Family Stadium, 8 a.m. Tony’s Pizza Events Center, 10 a.m. 100 Friday, May 14, 2021 College of Business Administration, 2020 and 2021 Bill Snyder Family Stadium, 1 p.m. 11 109 Graduate School, 2021 Bill Snyder Family Stadium, 8 a.m. Carl R. Ice College of Engineering, 2020 and 2021 Bill Snyder Family Stadium, 6 p.m. Graduate School, 2020 Bill Snyder Family Stadium, Noon 59 College of Veterinary Medicine, 2020 and 2021 Bill Snyder Family Stadium, 4 p.m. Saturday, May 15, 2021 62 College of Arts and Sciences, 2021 Bill Snyder Family Stadium, 8 a.m. College of Arts and Sciences, 2020 Bill Snyder Family Stadium, Noon 77 College of Architecture, Planning & Design Recognition Event Memorial Stadium, 1 p.m. 79 College of Education, 2020 and 2021 Bill Snyder Family Stadium, 4 p.m. 83 College of Health and Human Sciences, 2020 and 2021 Bill Snyder Family Stadium, 7:30 p.m. 1 CelebratingOur Future Dear Graduates, On behalf of Kansas State University, we extend our sincerest congratulations and best wishes on your graduation. We commend the persistence and determination you have shown in earning your degree, especially in the historic circumstances of the COVID-19 pandemic. Your diligence and adaptability in completing your degree will serve you well in your future endeavors. Whether it is your family, friends, faculty, staff or fellow students, know that all are proud of your accomplishments.