Soil Mechanical Properties at the Insight Landing Site on Mars
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
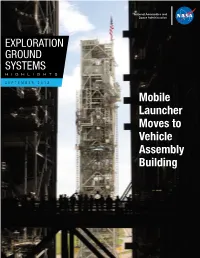
Mobile Launcher Moves to Vehicle Assembly Building EGS MONTHLY HIGHLIGHTS
National Aeronautics and Space Administration EXPLORATION GROUND SYSTEMS HIGHLIGHTS SEPTEMBER 2018 Mobile Launcher Moves to Vehicle Assembly Building EGS MONTHLY HIGHLIGHTS 3 Mobile launcher on the move 4 In the driver’s seat 5 Prepping for Underway Recovery Test 7 6 Employees, guests view ML move MOBILE LAUNCHER ON THE MOVE NASA’s mobile launcher is inside High Bay 3 at the Vehicle Assembly Building (VAB) on Sept. 11, 2018, at NASA’s Kennedy Space Center in Florida. Photo credit: NASA/Frank Michaux NASA’s mobile launcher, atop crawler-transporter 2, traveled from Launch Pad 39B to the Vehicle Assembly Building at the agency’s Kennedy Space Center in Florida, on Sept. 7, 2018. Arriving late in the afternoon, the mobile launcher stopped at the entrance to the VAB. Early the next day, Sept. 8, engineers and technicians rotated and extended the crew access arm near the top of the mobile launcher tower. Then the mobile launcher was moved inside High Bay 3, where it will spend about seven months undergoing verification and validation testing with the 10 levels of new work platforms, ensuring that it can provide support to the agency’s Space Launch System (SLS). The 380-foot-tall structure is equipped with the crew access Cliff Lanham, NASA project manager for the mobile launcher, takes a break arm and several umbilicals that will provide power, environmental to attend the employee event for the mobile launcher move to the Vehicle control, pneumatics, communication and electrical connections Assembly Building on Sept. 7, 2018, at NASA’s Kennedy Space Center in Florida. -

NASA Space Life and Physical Sciences and Research Applications
NASA Space Life and Physical Sciences and Research Applications SLSPRA has 11 topics listed below and on the following pages for your consideration and possible involvement. (1) Program: Physical Sciences Program (2) Research Title: Dusty Plasmas (3) Research Overview: Dusty plasma research uses dusty plasmas – mixtures of electrons, ions, and charged micron-size particles as a model system to understand astronomical phenomena involving dust-laden plasmas, and as a simplified system modelling the behavior of many-body systems in problems of statistical and condensed matter physics. Dusty plasma research also addresses practical questions of dust management in planetary exploration missions. Proposals are sought for research on dusty plasmas, particularly on the transport of particles in dusty plasmas. 4) NASA Contact a. Name: Bradley Carpenter, Ph.D. b. Organization: NASA Headquarters Space Life and Physical Sciences Research and Applications (SLPSRA) c. Work Phone: (202) 358-0826 d. Email: [email protected] 5) Commercial Entity: a. Company Name: na b. Contact Name: na c. Work Phone: na d. Cell Phone: na e Email: na 6) Partner contribution No NASA Partner contributions 7) Intellectual property management: No NASA Partner intellectual property concerns 8) Additional Information: All publications that result from an awarded EPSCOR study shall acknowledge NASA Space Life and Physical Sciences Research and Applications (SLPSRA). NNH20ZHA001C NASA EPSCoR Rapid Response Research (R3) NASA Space Life and Physical Sciences and Research Applications (continued) 1) Program: Fluids Physics and Combustion Science 2) Research Title: Drop Tower Studies 3) Research Overview: Fundamental discoveries made by NASA researchers over the last 50 years in fluids physics and combustion have helped enable advances in fluids management on spacecraft water recovery and thermal management systems, spacecraft fire safety, and fundamental combustion and fluids physics including low-temperature hydrocarbon oxidation, soot formation and flame stability. -

Race to Space Educator Edition
National Aeronautics and Space Administration Grade Level RACE TO SPACE 10-11 Key Topic Instructional Objectives U.S. space efforts from Students will 1957 - 1969 • analyze primary and secondary source documents to be used as Degree of Difficulty supporting evidence; Moderate • incorporate outside information (information learned in the study of the course) as additional support; and Teacher Prep Time • write a well-developed argument that answers the document-based 2 hours essay question regarding the analogy between the Race to Space and the Cold War. Problem Duration 60 minutes: Degree of Difficulty -15 minute document analysis For the average AP US History student the problem may be at a moderate - 45 minute essay writing difficulty level. -------------------------------- Background AP Course Topics This problem is part of a series of Social Studies problems celebrating the - The United States and contributions of NASA’s Apollo Program. the Early Cold War - The 1950’s On May 25, 1961, President John F. Kennedy spoke before a special joint - The Turbulent 1960’s session of Congress and challenged the country to safely send and return an American to the Moon before the end of the decade. President NCSS Social Studies Kennedy’s vision for the three-year old National Aeronautics and Space Standards Administration (NASA) motivated the United States to develop enormous - Time, Continuity technological capabilities and inspired the nation to reach new heights. and Change Eight years after Kennedy’s speech, NASA’s Apollo program successfully - People, Places and met the president’s challenge. On July 20, 1969, the world witnessed one of Environments the most astounding technological achievements in the 20th century. -

Mars, the Nearest Habitable World – a Comprehensive Program for Future Mars Exploration
Mars, the Nearest Habitable World – A Comprehensive Program for Future Mars Exploration Report by the NASA Mars Architecture Strategy Working Group (MASWG) November 2020 Front Cover: Artist Concepts Top (Artist concepts, left to right): Early Mars1; Molecules in Space2; Astronaut and Rover on Mars1; Exo-Planet System1. Bottom: Pillinger Point, Endeavour Crater, as imaged by the Opportunity rover1. Credits: 1NASA; 2Discovery Magazine Citation: Mars Architecture Strategy Working Group (MASWG), Jakosky, B. M., et al. (2020). Mars, the Nearest Habitable World—A Comprehensive Program for Future Mars Exploration. MASWG Members • Bruce Jakosky, University of Colorado (chair) • Richard Zurek, Mars Program Office, JPL (co-chair) • Shane Byrne, University of Arizona • Wendy Calvin, University of Nevada, Reno • Shannon Curry, University of California, Berkeley • Bethany Ehlmann, California Institute of Technology • Jennifer Eigenbrode, NASA/Goddard Space Flight Center • Tori Hoehler, NASA/Ames Research Center • Briony Horgan, Purdue University • Scott Hubbard, Stanford University • Tom McCollom, University of Colorado • John Mustard, Brown University • Nathaniel Putzig, Planetary Science Institute • Michelle Rucker, NASA/JSC • Michael Wolff, Space Science Institute • Robin Wordsworth, Harvard University Ex Officio • Michael Meyer, NASA Headquarters ii Mars, the Nearest Habitable World October 2020 MASWG Table of Contents Mars, the Nearest Habitable World – A Comprehensive Program for Future Mars Exploration Table of Contents EXECUTIVE SUMMARY .......................................................................................................................... -

Grail): Extended Mission and Endgame Status
44th Lunar and Planetary Science Conference (2013) 1777.pdf GRAVITY RECOVERY AND INTERIOR LABORATORY (GRAIL): EXTENDED MISSION AND ENDGAME STATUS. Maria T. Zuber1, David E. Smith1, Sami W. Asmar2, Alexander S. Konopliv2, Frank G. Lemoine3, H. Jay Melosh4, Gregory A. Neumann3, Roger J. Phillips5, Sean C. Solomon6,7, Michael M. Watkins2, Mark A. Wieczorek8, James G. Williams2, Jeffrey C. Andrews-Hanna9, James W. Head10, Wal- ter S. Kiefer11, Isamu Matsuyama12, Patrick J. McGovern11, Francis Nimmo13, G. Jeffrey Taylor14, Renee C. Weber15, Sander J. Goossens16, Gerhard L. Kruizinga2, Erwan Mazarico3, Ryan S. Park2 and Dah-Ning Yuan2. 1Dept. of Earth, Atmospheric and Planetary Sciences, Massachusetts Institute of Technology, Cambridge, MA 02129, USA ([email protected]); 2Jet Propulsion Laboratory, California Institute of Technol- ogy, Pasadena, CA 91109, USA; 3NASA Goddard Space Flight Center, Greenbelt, MD 20771, USA; 4Dept. of Earth and Atmospheric Sciences, Purdue University, West Lafayette, IN 47907, USA; 5Planetary Science Directorate, Southwest Research Institute, Boulder, CO 80302, USA; 6 Lamont-Doherty Earth Observatory, Columbia University, Palisades, NY 10964, USA; 7Dept. of Terrestrial Magnetism, Carnegie Institution of Washington, Washington, DC 20015, USA; 8Institut de Physique du Globe de Paris, 94100 Saint Maur des Fossés, France; 9Dept. of Geophysics and Center for Space Resources, Colorado School of Mines, Golden, CO 80401, USA; 10Dept. of Geological Sciences, Brown University, Providence, RI 02912, USA; 11Lunar and Planetary Institute, Houston, TX 77058, USA; 12Lunar and Planetary Laborato- ry, University of Arizona, Tucson, AZ 85721, USA; 13Dept. of Earth and Planetary Sciences, University of California, Santa Cruz, CA 95064, USA; 14Hawaii Institute of Geophysics and Planetology, University of Hawaii, Honolulu, HI 96822, USA; 15NASA Marshall Space Flight Center, Huntsville, AL 35805, USA, 16University of Maryland, Baltimore County, Baltimore, MD 21250, USA. -
Skylab Attitude and Pointing Control System
I' NASA TECHNICAL NOTE SKYLAB ATTITUDE AND POINTING CONTROL SYSTEM by W. B. Chzlbb and S. M. Seltzer George C. Marshall Space Flight Center Marshall Space Flight Center, Ala. 35812 NATIONAL AERONAUTICS AND SPACE ADMINISTRATION WASHINGTON, 0. C. FEBRUARY 1971 I I TECH LIBRARY KAFB, NM .. -, - ___.. 0132813 I. REPORT NO. 2. GOVERNMNT ACCESSION NO. j. KtLIPlbNl'b LAIALOb NO. - NASA- __ TN D-6068 I I 1 1. TITLE AND SUBTITLE 5. REPORT DATE L February 1971 Skylab Attitude and Pointing Control System 6. PERFORMING ORGANIZATION CODE __- I 7. AUTHOR(S) 8. PERFORMlNG ORGANlZATlON REPORT # - W... -B. Chubb and S. M. Seltzer I 3. PERFORMING ORGANIZATION NAME AND ADDRESS 10. WORK UNIT NO. 908 52 10 0000 M211 965 21 00 0000 George C. Marshall Space Flight Center I' 1. CONTRACT OR GRANT NO. Marshall Space Flight Center, Alabama 35812 L 13. TYPE OF REPORY & PERIOD COVERED - _-- .. .- __ 2. SPONSORING AGENCY NAME AN0 ADORES5 National Aeronautics and Space Administration Technical Note Washington, D. C. 20546 14. SPONSORING AGENCY CODE -. - - I 5. SUPPLEMENTARY NOTES Prepared by: Astrionics Laboratory Science and Engineering Directorate ~- 6. ABSTRACT NASA's Marshall Space Flight Center is developing an earth-orbiting manned space station called Skylab. The purpose of Skylab is to perform scientific experiments in solar astronomy and earth resources and to study biophysical and physical properties in a zero gravity environment. The attitude and pointing control system requirements are dictated by onboard experiments. These requirements and the resulting attitude and pointing control system are presented. 18 .- 0 1 STR inUT I ONSmTEMeNT Space station Control moment gyro Unclassified - Unlimited Attitude control -~ 9. -

Kennedy Space Center Visitor's Complex
Kennedy Space Center Visitor Complex Fact Sheet MEDIA CONTACTS For information on Kennedy Space Center Visitor Complex, sidebar stories, photo opportunities and shooting stand-ups, or to request a press kit, please contact: · Andrea Farmer, PR Manager, 321-449-4318 or [email protected] · Jillian Dick, PR Representative, 321-449-4273 or [email protected] KENNEDY SPACE CENTER VISITOR COMPLEX OVERVIEW Each year, more than 1.5 million guests from around the world experience their very own space adventure by exploring the exciting past, present and future of America’s space program at Kennedy Space Center Visitor Complex. Built in 1967 as a means for NASA astronauts’ and employees’ families to view space center operations, today the Visitor Complex is one of Central Florida’s most popular tourist destinations. Since 1995, when Delaware North Companies Parks & Resorts began managing the Visitor Complex, every aspect of this 70-acre facility has been entirely redeveloped and enhanced. From larger-than-life IMAX® films to live shows, hands-on activities and behind-the-scenes tours, Kennedy Space Center Visitor Complex offers guests an educational, entertaining and comprehensive space program experience. LIVE SHOWS/PROGRAMS Kennedy Space Center Tour: This tour takes guests on a narrated, video supplemented bus tour of Kennedy Space Center. The first stop is the LC-39 Observation Gantry, where guests enjoy a panoramic view of KSC and the Space Shuttle launch pads, as well as the rocket launch pads at Cape Canaveral Air Force Station. Buses then drive by the Vehicle Assembly Building (VAB) and the Orbiter Processing Facility. The second stop is the Apollo/Saturn V Center, which provides visitors with an inspirational and exhilarating look into America’s quest for the moon. -

Strategy for Human Spaceflight In
Developing the sustainable foundations for returning Americans to the Moon and enabling a new era of commercial spaceflight in low Earth orbit (LEO) are the linchpins of our national human spaceflight policy. As we work to return Americans to the Moon, we plan to do so in partnership with other nations. We will therefore coordinate our lunar exploration strategy with our ISS partners while maintaining and expanding our partnerships in LEO. As we work to create a new set of commercial human spaceflight capabilities, we will enable U.S. commercial enterprises to develop and operate under principles of long-term sustainability for space activity and recognize that their success cannot depend on Federal funding and programs alone. The National Space Council recognized the need for such a national strategy for human spaceflight in LEO and economic growth in space, and in February of 2018, called on NASA, the Department of State, and the Department of Commerce to work together to develop one. This strategy follows the direction established by the Administration through Space Policy Directives 1, 2, and 3, which created an innovative new framework for American leadership by reinvigorating America’s human exploration of the Moon and Mars; streamlining regulations on the commercial use of space; and establishing the first national policy for space traffic management. Our strategy for the future of human spaceflight in LEO and for economic growth in space will operate within the context of these directives. Through interagency dialogue, and in coordination with the Executive Office of the President, we have further defined our overarching goals for human spaceflight in LEO as follows: 1. -

An Enabling Foundation for NASA's Earth and Space Science Missions
An Enabling Foundation for NASA’s Earth and Space Science Missions SPACE STUDIES BOARD uring the 50-year history of the space age, the National Aeronautics and Space Administra- tion (NASA)’s space and Earth science missions haveD achieved an extraordinary record of accomplish- ments. Much of the success of these missions has been due to a solid foundation of enabling research and analysis. Mission-enabling activities frame the scientific questions on which plans for flight missions are based; develop advanced technologies that make new, complex missions feasible; and translate the data from spaceflight missions into new scientific understanding. While it has long been recognized that these activities are essential to the achieve- ment of NASA’s goals, defining and articulating their ap- propriate scale have posed a challenge. In 2007, Congress called for the National Research Council (NRC) to ex- amine the balance between spaceflight missions and their supporting activities at NASA, with the goal of assessing whether levels of support for mission-enabling activities were appropriate. This report defines and compares cur- rent research and technology development across multiple disciplines within NASA’s Science Mission Directorate (SMD), identifies opportunities for improvement, identi- fies principles and metrics for the effective management of mission-enabling portfolios, and recommends ways to strategically manage programs to maximize their effective- ness. NASA’s space and Earth science program comprises two principal components: spaceflight projects (including the design, development and launch of Earth orbiting and deep-space missions), and activities that are not dedicated to a single spaceflight mission but provide a broad enabling foundation for NASA’s spaceflight projects. -
Space Shuttle Program Artifacts
National Aeronautics and Space Administration Space Shuttle Program Artifacts Information Pamphlet National Aeronautics and Space Administration SPACE SHUTTLE HISTORY NASA’s Space Shuttle Orbiters are the first spacecraft capable of routinely launching into orbit like rockets and then returning to Earth as gliders. They are the main element of NASA’s Space Transportation System, and are used for scientific research and space applications, such as deploying and repairing satellites. On its own, a Space Shuttle can carry to orbit a payload of about 65,000 pounds. Typical missions have crews of about 7 astronauts, orbit at altitudes of around 150 to 250 miles, and stay in space for 10 days to 2 weeks. As we celebrate our 50th anniversary, NASA continues to move forward with a new focus for the manned space program. We expect to commence with the retirement of the Shuttles and associated hardware following our last mission which is projected for 2010. The Space Shuttle system is composed of several large components: the orbiter, three main engines, the external tank, and two solid rocket boosters. During the Shuttle-Mir Program, the Shuttles’ space access capabilities were combined with the Mir space station’s long-duration spaceflight qualities to create a new and effective combination. National Aeronautics and Space Administration FREQUENTLY ASKED QUESTIONS How will NASA dispose of Space Shuttle Program artifacts? NASA recognizes the importance the Space Shuttle Program has played in our Nation’s history and will work with the appropriate Federal agencies to ensure that Shuttle artifacts are preserved. In order for that to occur, NASA will utilize existing legislative authorities and agreements to transfer these assets to authorized recipients. -

Mars Insight Launch Press Kit
Introduction National Aeronautics and Space Administration Mars InSight Launch Press Kit MAY 2018 www.nasa.gov 1 2 Table of Contents Table of Contents Introduction 4 Media Services 8 Quick Facts: Launch Facts 12 Quick Facts: Mars at a Glance 16 Mission: Overview 18 Mission: Spacecraft 30 Mission: Science 40 Mission: Landing Site 53 Program & Project Management 55 Appendix: Mars Cube One Tech Demo 56 Appendix: Gallery 60 Appendix: Science Objectives, Quantified 62 Appendix: Historical Mars Missions 63 Appendix: NASA’s Discovery Program 65 3 Introduction Mars InSight Launch Press Kit Introduction NASA’s next mission to Mars -- InSight -- will launch from Vandenberg Air Force Base in California as early as May 5, 2018. It is expected to land on the Red Planet on Nov. 26, 2018. InSight is a mission to Mars, but it is more than a Mars mission. It will help scientists understand the formation and early evolution of all rocky planets, including Earth. A technology demonstration called Mars Cube One (MarCO) will share the launch with InSight and fly separately to Mars. Six Ways InSight Is Different NASA has a long and successful track record at Mars. Since 1965, it has flown by, orbited, landed and roved across the surface of the Red Planet. None of that has been easy. Only about 40 percent of the missions ever sent to Mars by any space agency have been successful. The planet’s thin atmosphere makes landing a challenge; its extreme temperature swings make it difficult to operate on the surface. But if a spacecraft survives the trip, there’s a bounty of science to be collected. -

Vehicle Assembly Building (VAB)
NASA’s VEHICLE ASSEMBLY BUILDING WE ARE GOING! With the Artemis program, NASA will LAUNCH the first woman and next man TO the Moon by 2024, using innovative technologies to explore more of the lunar surface than ever before. learn more: nasa.gov/artemis THE SPACE LAUNCH SYSTEM World’s MOST POWERFUL ROCKEt THE GATEWAY OUTPOST ORBITING THE MOON ARTEMIS GENERATION SPACE SUITS ORION SPACECRAFT Designed for deep space getting some Before you start the VAB, Lightly draw SUPPLY LIST or trace the blue lines here with a 1. PENCIL WITH ERASER perspective... ruler in pencil. this will provide a 1. 2. bLACK PEN OR MARKER good perspective frame for your 3. Ruler building. 4. SHEET OF PAPER NASA’s Vehicle Assembly Building was constructed using 65,000 cubic yards of concrete, 98,590 tons of steel, 45,000 steel beams and 1 million steel bolts. draw your Draw the Outline around the structure. The boxes in front first boxes 2. will be the start of the VAB’s The VAB’s 325 ton crane can primary entrance. lift 47 full grown african elephants. DRAW THESE SHAPES USING A pencil the current shapes to be drawn are always shown in red. Operated from cabs near the VAB’s ceiling, the cranes are precise enough to lower an object onto an egg without cracking it. additional boxes add to the area around the entrance and add the highbay doors, which will 3. and high bay doors allow the rocket to be carried out to the launch pad for liftoff. DRAW New Red SHAPES USING A pencil Fill in black lines USING A BLACK PEN It would take 250 billion ping pong balls to fill the vab.