A New Variant of Hypercube Quicksort on Distributed Memory Architectures
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Kapitel 1 Einleitung
Kapitel 1 Einleitung 1.1 Parallele Rechenmodelle Ein Parallelrechner besteht aus einer Menge P = {P0,...,Pn−1} von Prozessoren und einem Kommunikationsmechanismus. Wir unterscheiden drei Typen von Kommunikationsmechanismen: a) Kommunikation ¨uber einen gemeinsamen Speicher Jeder Prozessor hat Lese- und Schreibzugriff auf die Speicherzellen eines großen ge- meinsamen Speichers (shared memory). Einen solchen Rechner nennen wir sha- red memory machine, Parallele Registermaschine oder Parallel Random Ac- cess Machine (PRAM). Dieses Modell zeichnet sich dadurch aus, daß es sehr kom- fortabel programmiert werden kann, da man sich auf das Wesentliche“ beschr¨anken ” kann, wenn man Algorithmen entwirft. Auf der anderen Seite ist es jedoch nicht (auf direktem Wege) realisierbar, ohne einen erheblichen Effizienzverlust dabei in Kauf neh- men zu mussen.¨ b) Kommunikation ¨uber Links Hier sind die Prozessoren gem¨aß einem ungerichteten Kommunikationsgraphen G = (P, E) untereinander zu einem Prozessornetzwerk (kurz: Netzwerk) verbunden. Die Kommunikation wird dabei folgendermaßen durchgefuhrt:¨ Jeder Prozessor Pi hat ein Lesefenster, auf das er Schreibzugriff hat. Falls {Pi,Pj} ∈ E ist, darf Pj im Lese- fenster von Pi lesen. Pi hat zudem ein Schreibfenster, auf das er Lesezugriff hat. Falls {Pi,Pj} ∈ E ist, darf Pj in das Schreibfenster von Pi schreiben. Zugriffskonflikte (gleichzeitiges Lesen und Schreiben im gleichen Fenster) k¨onnen auf verschiedene Arten gel¨ost werden. Wie dies geregelt wird, werden wir, wenn n¨otig, jeweils spezifizieren. Ebenso werden wir manchmal von der oben beschriebenen Kommunikation abweichen, wenn dadurch die Rechnungen vereinfacht werden k¨onnen. Auch darauf werden wir jeweils hinweisen. Die Zahl aller m¨oglichen Leitungen, die es in einem Netzwerk mit n Prozessoren geben n 10 kann, ist 2 . -
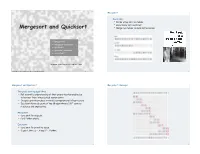
Mergesort and Quicksort ! Merge Two Halves to Make Sorted Whole
Mergesort Basic plan: ! Divide array into two halves. ! Recursively sort each half. Mergesort and Quicksort ! Merge two halves to make sorted whole. • mergesort • mergesort analysis • quicksort • quicksort analysis • animations Reference: Algorithms in Java, Chapters 7 and 8 Copyright © 2007 by Robert Sedgewick and Kevin Wayne. 1 3 Mergesort and Quicksort Mergesort: Example Two great sorting algorithms. ! Full scientific understanding of their properties has enabled us to hammer them into practical system sorts. ! Occupy a prominent place in world's computational infrastructure. ! Quicksort honored as one of top 10 algorithms of 20th century in science and engineering. Mergesort. ! Java sort for objects. ! Perl, Python stable. Quicksort. ! Java sort for primitive types. ! C qsort, Unix, g++, Visual C++, Python. 2 4 Merging Merging. Combine two pre-sorted lists into a sorted whole. How to merge efficiently? Use an auxiliary array. l i m j r aux[] A G L O R H I M S T mergesort k mergesort analysis a[] A G H I L M quicksort quicksort analysis private static void merge(Comparable[] a, Comparable[] aux, int l, int m, int r) animations { copy for (int k = l; k < r; k++) aux[k] = a[k]; int i = l, j = m; for (int k = l; k < r; k++) if (i >= m) a[k] = aux[j++]; merge else if (j >= r) a[k] = aux[i++]; else if (less(aux[j], aux[i])) a[k] = aux[j++]; else a[k] = aux[i++]; } 5 7 Mergesort: Java implementation of recursive sort Mergesort analysis: Memory Q. How much memory does mergesort require? A. Too much! public class Merge { ! Original input array = N. -
2.3 Quicksort
2.3 Quicksort ‣ quicksort ‣ selection ‣ duplicate keys ‣ system sorts Algorithms, 4th Edition · Robert Sedgewick and Kevin Wayne · Copyright © 2002–2010 · January 30, 2011 12:46:16 PM Two classic sorting algorithms Critical components in the world’s computational infrastructure. • Full scientific understanding of their properties has enabled us to develop them into practical system sorts. • Quicksort honored as one of top 10 algorithms of 20th century in science and engineering. Mergesort. last lecture • Java sort for objects. • Perl, C++ stable sort, Python stable sort, Firefox JavaScript, ... Quicksort. this lecture • Java sort for primitive types. • C qsort, Unix, Visual C++, Python, Matlab, Chrome JavaScript, ... 2 ‣ quicksort ‣ selection ‣ duplicate keys ‣ system sorts 3 Quicksort Basic plan. • Shuffle the array. • Partition so that, for some j - element a[j] is in place - no larger element to the left of j j - no smaller element to the right of Sir Charles Antony Richard Hoare • Sort each piece recursively. 1980 Turing Award input Q U I C K S O R T E X A M P L E shu!e K R A T E L E P U I M Q C X O S partitioning element partition E C A I E K L P U T M Q R X O S not greater not less sort left A C E E I K L P U T M Q R X O S sort right A C E E I K L M O P Q R S T U X result A C E E I K L M O P Q R S T U X Quicksort overview 4 Quicksort partitioning Basic plan. -

An Evolutionary Approach for Sorting Algorithms
ORIENTAL JOURNAL OF ISSN: 0974-6471 COMPUTER SCIENCE & TECHNOLOGY December 2014, An International Open Free Access, Peer Reviewed Research Journal Vol. 7, No. (3): Published By: Oriental Scientific Publishing Co., India. Pgs. 369-376 www.computerscijournal.org Root to Fruit (2): An Evolutionary Approach for Sorting Algorithms PRAMOD KADAM AND Sachin KADAM BVDU, IMED, Pune, India. (Received: November 10, 2014; Accepted: December 20, 2014) ABstract This paper continues the earlier thought of evolutionary study of sorting problem and sorting algorithms (Root to Fruit (1): An Evolutionary Study of Sorting Problem) [1]and concluded with the chronological list of early pioneers of sorting problem or algorithms. Latter in the study graphical method has been used to present an evolution of sorting problem and sorting algorithm on the time line. Key words: Evolutionary study of sorting, History of sorting Early Sorting algorithms, list of inventors for sorting. IntroDUCTION name and their contribution may skipped from the study. Therefore readers have all the rights to In spite of plentiful literature and research extent this study with the valid proofs. Ultimately in sorting algorithmic domain there is mess our objective behind this research is very much found in documentation as far as credential clear, that to provide strength to the evolutionary concern2. Perhaps this problem found due to lack study of sorting algorithms and shift towards a good of coordination and unavailability of common knowledge base to preserve work of our forebear platform or knowledge base in the same domain. for upcoming generation. Otherwise coming Evolutionary study of sorting algorithm or sorting generation could receive hardly information about problem is foundation of futuristic knowledge sorting problems and syllabi may restrict with some base for sorting problem domain1. -

Algoritmi Za Sortiranje U Programskom Jeziku C++ Završni Rad
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Repository of the University of Rijeka SVEUČILIŠTE U RIJECI FILOZOFSKI FAKULTET U RIJECI ODSJEK ZA POLITEHNIKU Algoritmi za sortiranje u programskom jeziku C++ Završni rad Mentor završnog rada: doc. dr. sc. Marko Maliković Student: Alen Jakus Rijeka, 2016. SVEUČILIŠTE U RIJECI Filozofski fakultet Odsjek za politehniku Rijeka, Sveučilišna avenija 4 Povjerenstvo za završne i diplomske ispite U Rijeci, 07. travnja, 2016. ZADATAK ZAVRŠNOG RADA (na sveučilišnom preddiplomskom studiju politehnike) Pristupnik: Alen Jakus Zadatak: Algoritmi za sortiranje u programskom jeziku C++ Rješenjem zadatka potrebno je obuhvatiti sljedeće: 1. Napraviti pregled algoritama za sortiranje. 2. Opisati odabrane algoritme za sortiranje. 3. Dijagramima prikazati rad odabranih algoritama za sortiranje. 4. Opis osnovnih svojstava programskog jezika C++. 5. Detaljan opis tipova podataka, izvedenih oblika podataka, naredbi i drugih elemenata iz programskog jezika C++ koji se koriste u rješenjima odabranih problema. 6. Opis rješenja koja su dobivena iz napisanih programa. 7. Cjelokupan kôd u programskom jeziku C++. U završnom se radu obvezno treba pridržavati Pravilnika o diplomskom radu i Uputa za izradu završnog rada sveučilišnog dodiplomskog studija. Zadatak uručen pristupniku: 07. travnja 2016. godine Rok predaje završnog rada: ____________________ Datum predaje završnog rada: ____________________ Zadatak zadao: Doc. dr. sc. Marko Maliković 2 FILOZOFSKI FAKULTET U RIJECI Odsjek za politehniku U Rijeci, 07. travnja 2016. godine ZADATAK ZA ZAVRŠNI RAD (na sveučilišnom preddiplomskom studiju politehnike) Pristupnik: Alen Jakus Naslov završnog rada: Algoritmi za sortiranje u programskom jeziku C++ Kratak opis zadatka: Napravite pregled algoritama za sortiranje. Opišite odabrane algoritme za sortiranje. -

Quick Sort Algorithm Song Qin Dept
Quick Sort Algorithm Song Qin Dept. of Computer Sciences Florida Institute of Technology Melbourne, FL 32901 ABSTRACT each iteration. Repeat this on the rest of the unsorted region Given an array with n elements, we want to rearrange them in without the first element. ascending order. In this paper, we introduce Quick Sort, a Bubble sort works as follows: keep passing through the list, divide-and-conquer algorithm to sort an N element array. We exchanging adjacent element, if the list is out of order; when no evaluate the O(NlogN) time complexity in best case and O(N2) exchanges are required on some pass, the list is sorted. in worst case theoretically. We also introduce a way to approach the best case. Merge sort [4] has a O(NlogN) time complexity. It divides the 1. INTRODUCTION array into two subarrays each with N/2 items. Conquer each Search engine relies on sorting algorithm very much. When you subarray by sorting it. Unless the array is sufficiently small(one search some key word online, the feedback information is element left), use recursion to do this. Combine the solutions to brought to you sorted by the importance of the web page. the subarrays by merging them into single sorted array. 2 Bubble, Selection and Insertion Sort, they all have an O(N2) time In Bubble sort, Selection sort and Insertion sort, the O(N ) time complexity that limits its usefulness to small number of element complexity limits the performance when N gets very big. no more than a few thousand data points. -

Heapsort Vs. Quicksort
Heapsort vs. Quicksort Most groups had sound data and observed: – Random problem instances • Heapsort runs perhaps 2x slower on small instances • It’s even slower on larger instances – Nearly-sorted instances: • Quicksort is worse than Heapsort on large instances. Some groups counted comparisons: • Heapsort uses more comparisons on random data Most groups concluded: – Experiments show that MH2 predictions are correct • At least for random data 1 CSE 202 - Dynamic Programming Sorting Random Data N Time (us) Quicksort Heapsort 10 19 21 100 173 293 1,000 2,238 5,289 10,000 28,736 78,064 100,000 355,949 1,184,493 “HeapSort is definitely growing faster (in running time) than is QuickSort. ... This lends support to the MH2 model.” Does it? What other explanations are there? 2 CSE 202 - Dynamic Programming Sorting Random Data N Number of comparisons Quicksort Heapsort 10 54 56 100 987 1,206 1,000 13,116 18,708 10,000 166,926 249,856 100,000 2,050,479 3,136,104 But wait – the number of comparisons for Heapsort is also going up faster that for Quicksort. This has nothing to do with the MH2 analysis. How can we see if MH2 analysis is relevant? 3 CSE 202 - Dynamic Programming Sorting Random Data N Time (us) Compares Time / compare (ns) Quicksort Heapsort Quicksort Heapsort Quicksort Heapsort 10 19 21 54 56 352 375 100 173 293 987 1,206 175 243 1,000 2,238 5,289 13,116 18,708 171 283 10,000 28,736 78,064 166,926 249,856 172 312 100,000 355,949 1,184,493 2,050,479 3,136,104 174 378 Nice data! – Why does N = 10 take so much longer per comparison? – Why does Heapsort always take longer than Quicksort? – Is Heapsort growth as predicted by MH2 model? • Is N large enough to be interesting?? (Machine is a Sun Ultra 10) 4 CSE 202 - Dynamic Programming .. -
Advanced Topics in Sorting
Advanced Topics in Sorting complexity system sorts duplicate keys comparators 1 complexity system sorts duplicate keys comparators 2 Complexity of sorting Computational complexity. Framework to study efficiency of algorithms for solving a particular problem X. Machine model. Focus on fundamental operations. Upper bound. Cost guarantee provided by some algorithm for X. Lower bound. Proven limit on cost guarantee of any algorithm for X. Optimal algorithm. Algorithm with best cost guarantee for X. lower bound ~ upper bound Example: sorting. • Machine model = # comparisons access information only through compares • Upper bound = N lg N from mergesort. • Lower bound ? 3 Decision Tree a < b yes no code between comparisons (e.g., sequence of exchanges) b < c a < c yes no yes no a b c b a c a < c b < c yes no yes no a c b c a b b c a c b a 4 Comparison-based lower bound for sorting Theorem. Any comparison based sorting algorithm must use more than N lg N - 1.44 N comparisons in the worst-case. Pf. Assume input consists of N distinct values a through a . • 1 N • Worst case dictated by tree height h. N ! different orderings. • • (At least) one leaf corresponds to each ordering. Binary tree with N ! leaves cannot have height less than lg (N!) • h lg N! lg (N / e) N Stirling's formula = N lg N - N lg e N lg N - 1.44 N 5 Complexity of sorting Upper bound. Cost guarantee provided by some algorithm for X. Lower bound. Proven limit on cost guarantee of any algorithm for X. -

Sorting Algorithm 1 Sorting Algorithm
Sorting algorithm 1 Sorting algorithm In computer science, a sorting algorithm is an algorithm that puts elements of a list in a certain order. The most-used orders are numerical order and lexicographical order. Efficient sorting is important for optimizing the use of other algorithms (such as search and merge algorithms) that require sorted lists to work correctly; it is also often useful for canonicalizing data and for producing human-readable output. More formally, the output must satisfy two conditions: 1. The output is in nondecreasing order (each element is no smaller than the previous element according to the desired total order); 2. The output is a permutation, or reordering, of the input. Since the dawn of computing, the sorting problem has attracted a great deal of research, perhaps due to the complexity of solving it efficiently despite its simple, familiar statement. For example, bubble sort was analyzed as early as 1956.[1] Although many consider it a solved problem, useful new sorting algorithms are still being invented (for example, library sort was first published in 2004). Sorting algorithms are prevalent in introductory computer science classes, where the abundance of algorithms for the problem provides a gentle introduction to a variety of core algorithm concepts, such as big O notation, divide and conquer algorithms, data structures, randomized algorithms, best, worst and average case analysis, time-space tradeoffs, and lower bounds. Classification Sorting algorithms used in computer science are often classified by: • Computational complexity (worst, average and best behaviour) of element comparisons in terms of the size of the list . For typical sorting algorithms good behavior is and bad behavior is . -

Fragile Complexity of Comparison-Based Algorithms
Fragile Complexity of Comparison-Based Algorithms∗ Peyman Afshani Aarhus University, Denmark [email protected] Rolf Fagerberg University of Southern Denmark, Odense, Denmark [email protected] David Hammer Goethe University Frankfurt, Germany University of Southern Denmark, Odense, Denmark [email protected] Riko Jacob IT University of Copenhagen, Denmark [email protected] Irina Kostitsyna TU Eindhoven, The Netherlands [email protected] Ulrich Meyer Goethe University Frankfurt, Germany [email protected] Manuel Penschuck Goethe University Frankfurt, Germany [email protected] Nodari Sitchinava University of Hawaii at Manoa [email protected] Abstract We initiate a study of algorithms with a focus on the computational complexity of individual elements, and introduce the fragile complexity of comparison-based algorithms as the maximal number of comparisons any individual element takes part in. We give a number of upper and lower bounds on the fragile complexity for fundamental problems, including Minimum, Selection, Sorting and Heap Construction. The results include both deterministic and randomized upper and lower bounds, and demonstrate a separation between the two settings for a number of problems. The depth of a comparator network is a straight-forward upper bound on the worst case fragile complexity of the corresponding fragile algorithm. We prove that fragile complexity is a different and strictly easier property than the depth of comparator networks, in the sense that for some problems a fragile complexity equal -
Visvesvaraya Technological University a Project Report
` VISVESVARAYA TECHNOLOGICAL UNIVERSITY “Jnana Sangama”, Belagavi – 590 018 A PROJECT REPORT ON “PREDICTIVE SCHEDULING OF SORTING ALGORITHMS” Submitted in partial fulfillment for the award of the degree of BACHELOR OF ENGINEERING IN COMPUTER SCIENCE AND ENGINEERING BY RANJIT KUMAR SHA (1NH13CS092) SANDIP SHAH (1NH13CS101) SAURABH RAI (1NH13CS104) GAURAV KUMAR (1NH13CS718) Under the guidance of Ms. Sridevi (Senior Assistant Professor, Dept. of CSE, NHCE) DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING NEW HORIZON COLLEGE OF ENGINEERING (ISO-9001:2000 certified, Accredited by NAAC ‘A’, Permanently affiliated to VTU) Outer Ring Road, Panathur Post, Near Marathalli, Bangalore – 560103 ` NEW HORIZON COLLEGE OF ENGINEERING (ISO-9001:2000 certified, Accredited by NAAC ‘A’ Permanently affiliated to VTU) Outer Ring Road, Panathur Post, Near Marathalli, Bangalore-560 103 DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING CERTIFICATE Certified that the project work entitled “PREDICTIVE SCHEDULING OF SORTING ALGORITHMS” carried out by RANJIT KUMAR SHA (1NH13CS092), SANDIP SHAH (1NH13CS101), SAURABH RAI (1NH13CS104) and GAURAV KUMAR (1NH13CS718) bonafide students of NEW HORIZON COLLEGE OF ENGINEERING in partial fulfillment for the award of Bachelor of Engineering in Computer Science and Engineering of the Visvesvaraya Technological University, Belagavi during the year 2016-2017. It is certified that all corrections/suggestions indicated for Internal Assessment have been incorporated in the report deposited in the department library. The project report has been approved as it satisfies the academic requirements in respect of Project work prescribed for the Degree. Name & Signature of Guide Name Signature of HOD Signature of Principal (Ms. Sridevi) (Dr. Prashanth C.S.R.) (Dr. Manjunatha) External Viva Name of Examiner Signature with date 1. -

Reactive Sorting Networks
Reactive Sorting Networks Bjarno Oeyen Sam Van den Vonder Wolfgang De Meuter [email protected] [email protected] [email protected] Vrije Universiteit Brussel Vrije Universiteit Brussel Vrije Universiteit Brussel Brussels, Belgium Brussels, Belgium Brussels, Belgium Abstract is a key part of many applications. Implementing the stand- Sorting is a central problem in computer science and one ard textbook set of sorting algorithms is also used to serve of the key components of many applications. To the best of as a litmus test to study the expressiveness of new program- our knowledge, no reactive programming implementation ming languages and programming paradigms. To the best of of sorting algorithms has ever been presented. our knowledge, this exercise is currently lacking from the In this paper we present reactive implementations of so- literature on reactive programming. called sorting networks. Sorting networks are networks of This paper presents an implementation of a number of comparators that are wired up in a particular order. Data elementary sorting algorithms in an experimental reactive enters a sorting network along various input wires and leaves programming language called Haai [22]. One of the key in- the sorting network on the same number of output wires spirations of our research is that the canonical representation that carry the data in sorted order. of reactive programs, using directed acyclic graphs (DAGs) This paper shows how sorting networks can be expressed as dependency graphs, naturally maps onto the visual rep- elegantly in a reactive programming language by aligning the resentation of so-called sorting networks.