The Programming Language Concurrent Pascal
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

B-Prolog User's Manual
B-Prolog User's Manual (Version 8.1) Prolog, Agent, and Constraint Programming Neng-Fa Zhou Afany Software & CUNY & Kyutech Copyright c Afany Software, 1994-2014. Last updated February 23, 2014 Preface Welcome to B-Prolog, a versatile and efficient constraint logic programming (CLP) system. B-Prolog is being brought to you by Afany Software. The birth of CLP is a milestone in the history of programming languages. CLP combines two declarative programming paradigms: logic programming and constraint solving. The declarative nature has proven appealing in numerous ap- plications, including computer-aided design and verification, databases, software engineering, optimization, configuration, graphical user interfaces, and language processing. It greatly enhances the productivity of software development and soft- ware maintainability. In addition, because of the availability of efficient constraint- solving, memory management, and compilation techniques, CLP programs can be more efficient than their counterparts that are written in procedural languages. B-Prolog is a Prolog system with extensions for programming concurrency, constraints, and interactive graphics. The system is based on a significantly refined WAM [1], called TOAM Jr. [19] (a successor of TOAM [16]), which facilitates software emulation. In addition to a TOAM emulator with a garbage collector that is written in C, the system consists of a compiler and an interpreter that are written in Prolog, and a library of built-in predicates that are written in C and in Prolog. B-Prolog does not only accept standard-form Prolog programs, but also accepts matching clauses, in which the determinacy and input/output unifications are explicitly denoted. Matching clauses are compiled into more compact and faster code than standard-form clauses. -
Cobol Vs Standards and Conventions
Number: 11.10 COBOL VS STANDARDS AND CONVENTIONS July 2005 Number: 11.10 Effective: 07/01/05 TABLE OF CONTENTS 1 INTRODUCTION .................................................................................................................................................. 1 1.1 PURPOSE .................................................................................................................................................. 1 1.2 SCOPE ...................................................................................................................................................... 1 1.3 APPLICABILITY ........................................................................................................................................... 2 1.4 MAINFRAME COMPUTER PROCESSING ....................................................................................................... 2 1.5 MAINFRAME PRODUCTION JOB MANAGEMENT ............................................................................................ 2 1.6 COMMENTS AND SUGGESTIONS ................................................................................................................. 3 2 COBOL DESIGN STANDARDS .......................................................................................................................... 3 2.1 IDENTIFICATION DIVISION .................................................................................................................. 4 2.1.1 PROGRAM-ID .......................................................................................................................... -
Concurrent Programming Introduction
v1.0 20130407 Programmazione Avanzata e Paradigmi Ingegneria e Scienze Informatiche - UNIBO a.a 2013/2014 Lecturer: Alessandro Ricci [module 2.1] CONCURRENT PROGRAMMING INTRODUCTION PAP LM - ISI - Cesena - UNIBO !1 SUMMARY • Concurrent programming – motivations: HW evolution – basic jargon • processes interaction, cooperation, competition, • mutual exclusion, synchronization • problems: deadlocks, starvation, livelocks • A little bit of history – Dijkstra, Hoare, Brinch-Hansen • Concurrent languages, mechanisms, abstractions – overview PAP LM - ISI - Cesena - UNIBO Introduction !2 CONCURRENCY AND CONCURRENT SYSTEMS • Concurrency as a main concept of many domains and systems – operating systems, multi-threaded and multi-process programs, distributed systems, control systems, real-time systems,... • General definitions – “In computer science, concurrency is a property of systems in which several computational processes are executing at the same time, and potentially interacting with each other.” [ROS-97] – “Concurrency is concerned with the fundamental aspects of systems of multiple, simultaneously active computing agents, that interact with one another” [CLE-96] • Common aspects – systems with multiple activities or processes whose execution overlaps in time – activities can have some kind of dependencies, therefore can interact PAP LM - ISI - Cesena - UNIBO Introduction !3 CONCURRENT PROGRAMMING • Concurrent programming – building programs in which multiple computational activities overlap in time and typically interact in some way • Concurrent program – finite set of sequential programs that can be executed in parallel, i.e. overlapped in time • a sequential program specifies sequential execution of a list of statements • the execution of a sequential program is called process • a concurrent program specifies two or more sequential programs that may be executed concurrently as parallel processes – the execution of a concurrent program is called concurrent computation or elaboration PAP LM - ISI - Cesena - UNIBO Introduction !4 CONCURRENT PROGRAMMING VS. -

Foundation API Client Library PHP – Usage Examples By: Juergen Rolf Revision Version: 1.2
Foundation API Client Library PHP – Usage Examples By: Juergen Rolf Revision Version: 1.2 Revision Date: 2019-09-17 Company Unrestricted Foundation API Client Library PHP – Installation Guide Document Information Document Details File Name MDG Foundation API Client Library PHP - Usage Examples_v1_2 external.docx Contents Usage Examples and Tutorial introduction for the Foundation API Client Library - PHP Author Juergen Rolf Version 1.2 Date 2019-09-17 Intended Audience This document provides a few examples helping the reader to understand the necessary mechanisms to request data from the Market Data Gateway (MDG). The intended audience are application developers who want to get a feeling for the way they can request and receive data from the MDG. Revision History Revision Date Version Notes Author Status 2017-12-04 1.0 Initial Release J. Rolf Released 2018-03-27 1.1 Adjustments for external J. Rolf Released release 2019-09-17 1.2 Minor bugfixes J. Ockel Released References No. Document Version Date 1. Quick Start Guide - Market Data Gateway (MDG) 1.1 2018-03-27 APIs external 2. MDG Foundation API Client Library PHP – Installation 1.2 2019-09-17 Guide external Company Unrestricted Copyright © 2018 FactSet Digital Solutions GmbH. All rights reserved. Revision Version 1.2, Revision Date 2019-09-17, Author: Juergen Rolf www.factset.com | 2 Foundation API Client Library PHP – Installation Guide Table of Contents Document Information ............................................................................................................................ -

A Quick Reference to C Programming Language
A Quick Reference to C Programming Language Structure of a C Program #include(stdio.h) /* include IO library */ #include... /* include other files */ #define.. /* define constants */ /* Declare global variables*/) (variable type)(variable list); /* Define program functions */ (type returned)(function name)(parameter list) (declaration of parameter types) { (declaration of local variables); (body of function code); } /* Define main function*/ main ((optional argc and argv arguments)) (optional declaration parameters) { (declaration of local variables); (body of main function code); } Comments Format: /*(body of comment) */ Example: /*This is a comment in C*/ Constant Declarations Format: #define(constant name)(constant value) Example: #define MAXIMUM 1000 Type Definitions Format: typedef(datatype)(symbolic name); Example: typedef int KILOGRAMS; Variables Declarations: Format: (variable type)(name 1)(name 2),...; Example: int firstnum, secondnum; char alpha; int firstarray[10]; int doublearray[2][5]; char firststring[1O]; Initializing: Format: (variable type)(name)=(value); Example: int firstnum=5; Assignments: Format: (name)=(value); Example: firstnum=5; Alpha='a'; Unions Declarations: Format: union(tag) {(type)(member name); (type)(member name); ... }(variable name); Example: union demotagname {int a; float b; }demovarname; Assignment: Format: (tag).(member name)=(value); demovarname.a=1; demovarname.b=4.6; Structures Declarations: Format: struct(tag) {(type)(variable); (type)(variable); ... }(variable list); Example: struct student {int -

A Tutorial Introduction to the Language B
A TUTORIAL INTRODUCTION TO THE LANGUAGE B B. W. Kernighan Bell Laboratories Murray Hill, New Jersey 1. Introduction B is a new computer language designed and implemented at Murray Hill. It runs and is actively supported and documented on the H6070 TSS system at Murray Hill. B is particularly suited for non-numeric computations, typified by system programming. These usually involve many complex logical decisions, computations on integers and fields of words, especially charac- ters and bit strings, and no floating point. B programs for such operations are substantially easier to write and understand than GMAP programs. The generated code is quite good. Implementation of simple TSS subsystems is an especially good use for B. B is reminiscent of BCPL [2] , for those who can remember. The original design and implementation are the work of K. L. Thompson and D. M. Ritchie; their original 6070 version has been substantially improved by S. C. Johnson, who also wrote the runtime library. This memo is a tutorial to make learning B as painless as possible. Most of the features of the language are mentioned in passing, but only the most important are stressed. Users who would like the full story should consult A User’s Reference to B on MH-TSS, by S. C. Johnson [1], which should be read for details any- way. We will assume that the user is familiar with the mysteries of TSS, such as creating files, text editing, and the like, and has programmed in some language before. Throughout, the symbolism (->n) implies that a topic will be expanded upon in section n of this manual. -

Quick Tips and Tricks: Perl Regular Expressions in SAS® Pratap S
Paper 4005-2019 Quick Tips and Tricks: Perl Regular Expressions in SAS® Pratap S. Kunwar, Jinson Erinjeri, Emmes Corporation. ABSTRACT Programming with text strings or patterns in SAS® can be complicated without the knowledge of Perl regular expressions. Just knowing the basics of regular expressions (PRX functions) will sharpen anyone's programming skills. Having attended a few SAS conferences lately, we have noticed that there are few presentations on this topic and many programmers tend to avoid learning and applying the regular expressions. Also, many of them are not aware of the capabilities of these functions in SAS. In this presentation, we present quick tips on these expressions with various applications which will enable anyone learn this topic with ease. INTRODUCTION SAS has numerous character (string) functions which are very useful in manipulating character fields. Every SAS programmer is generally familiar with basic character functions such as SUBSTR, SCAN, STRIP, INDEX, UPCASE, LOWCASE, CAT, ANY, NOT, COMPARE, COMPBL, COMPRESS, FIND, TRANSLATE, TRANWRD etc. Though these common functions are very handy for simple string manipulations, they are not built for complex pattern matching and search-and-replace operations. Regular expressions (RegEx) are both flexible and powerful and are widely used in popular programming languages such as Perl, Python, JavaScript, PHP, .NET and many more for pattern matching and translating character strings. Regular expressions skills can be easily ported to other languages like SQL., However, unlike SQL, RegEx itself is not a programming language, but simply defines a search pattern that describes text. Learning regular expressions starts with understanding of character classes and metacharacters. -
Chapter 6: the Linker
6. The Linker 6-1 Chapter 6: The Linker References: • Brian W. Kernighan / Dennis M. Ritchie: The C Programming Language, 2nd Ed. Prentice-Hall, 1988. • Samuel P. Harbison / Guy L. Steele Jr.: C — A Reference Manual, 4th Ed. Prentice-Hall, 1995. • Online Documentation of Microsoft Visual C++ 6.0 (Standard Edition): MSDN Library: Visual Studio 6.0 release. • Horst Wettstein: Assemblierer und Binder (in German). Carl Hanser Verlag, 1979. • Peter Rechenberg, Gustav Pomberger (Eds.): Informatik-Handbuch (in German). Carl Hanser Verlag, 1997. Kapitel 12: Systemsoftware (H. M¨ossenb¨ock). Stefan Brass: Computer Science III Universit¨atGiessen, 2001 6. The Linker 6-2 Overview ' $ 1. Introduction (Overview) & % 2. Object Files, Libraries, and the Linker 3. Make 4. Dynamic Linking Stefan Brass: Computer Science III Universit¨atGiessen, 2001 6. The Linker 6-3 Introduction (1) • Often, a program consists of several modules which are separately compiled. Reasons are: The program is large. Even with fast computers, editing and compiling a single file with a million lines leads to unnecessary delays. The program is developed by several people. Different programmers cannot easily edit the same file at the same time. (There is software for collaborative work that permits that, but it is still a research topic.) A large program is easier to understand if it is divided into natural units. E.g. each module defines one data type with its operations. Stefan Brass: Computer Science III Universit¨atGiessen, 2001 6. The Linker 6-4 Introduction (2) • Reasons for splitting a program into several source files (continued): The same module might be used in different pro- grams (e.g. -

Message from the Editor
Article Reading Qualitative Studies Margarete Sandelowski University of North Carolina at Chapel Hill Chapel Hill, North Carolina, USA Julie Barroso University of North Carolina at Chapel Hill Chapel Hill, North Carolina, USA © 2002 Sandelowski et al. This is an Open Access article distributed under the terms of the Creative Commons Attribution License (http://creativecommons.org/licenses/by/2.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. Abstract In this article, the authors hope to shift the debate in the practice disciplines concerning quality in qualitative research from a preoccupation with epistemic criteria toward consideration of aesthetic and rhetorical concerns. They see epistemic criteria as inevitably including aesthetic and rhetorical concerns. The authors argue here for a reconceptualization of the research report as a literary technology that mediates between researcher/writer and reviewer/reader. The evaluation of these reports should thus be treated as occasions in which readers seek to make texts meaningful, rather than for the rigid application of standards and criteria. The authors draw from reader-response theories, literature on rhetoric and representation in science, and findings from an on-going methodological research project involving the appraisal of a set of qualitative studies. Keywords: Reader-response, reading, representation, rhetoric, qualitative research, quality criteria, writing Acknowledgments: We thank the members of -
HP Openvms Utility Routines Manual
HP OpenVMS Utility Routines Manual Order Number: BA554-90019 June 2010 This manual describes the OpenVMS utility routines, a set of routines that provide a programming interface to various OpenVMS utilities. Revision/Update Information: This manual supersedes the HP OpenVMS Utility Routines Manual, OpenVMS Alpha Version 8.3. Software Version: OpenVMS Version 8.4 for Integrity servers OpenVMS Alpha Version 8.4 Hewlett-Packard Company Palo Alto, California © Copyright 2010 Hewlett-Packard Development Company, L.P. Confidential computer software. Valid license from HP required for possession, use or copying. Consistent with FAR 12.211 and 12.212, Commercial Computer Software, Computer Software Documentation, and Technical Data for Commercial Items are licensed to the U.S. Government under vendor’s standard commercial license. The information contained herein is subject to change without notice. The only warranties for HP products and services are set forth in the express warranty statements accompanying such products and services. Nothing herein should be construed as constituting an additional warranty. HP shall not be liable for technical or editorial errors or omissions contained herein. Intel and Itanium are trademarks or registered trademarks of Intel Corporation or its subsidiaries in the United States and other countries. ZK4493 The HP OpenVMS documentation set is available on CD. This document was prepared using DECdocument, Version 3.3-1B. Contents Preface ............................................................ xvii 1 Introduction to Utility Routines 2 Access Control List (ACL) Editor Routine 2.1 Introduction to the ACL Editor Routine ........................... ACL–1 2.2 Using the ACL Editor Routine: An Example ....................... ACL–1 2.3 ACL Editor Routine . ........................................ ACL–2 ACLEDIT$EDIT ........................................... -
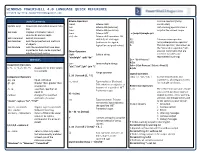
WINDOWS POWERSHELL 4.0 LANGUAGE QUICK REFERENCE Created By
WINDOWS POWERSHELL 4.0 LANGUAGE QUICK REFERENCE Created by http://powershellmagazine.com Useful Commands Bitwise Operators , Comma operator (Array -band Bitwise AND constructor) Update-Help Downloads and installs newest help -bor Bitwise OR (inclusive) . Dot-sourcing operator runs a files -bxor Bitwise OR (exclusive) script in the current scope Get-Help Displays information about -bnot Bitwise NOT . c:\scripts\sample.ps1 commands and concepts -shl, -shr Bitwise shift operators. Bit Get-Command Gets all commands shift left, bit shift right $( ) Subexpression operator Get-Member Gets the properties and methods (arithmetic for signed, @( ) Array subexpression operator of objects logical for unsigned values) & The call operator, also known as Get-Module Gets the modules that have been the "invocation operator," lets imported or that can be imported Other Operators you run commands that are into the current session -Split Splits a string stored in variables and “abcdefghi” -split “de” represented by strings. Operators $a = "Get-Process" -join Joins multiple strings & $a Assignment Operators “abc”,”def”,”ghi” -join “;” $sb = { Get-Process | Select –First 2 } =, +=, -=, *=, /=, %=, ++, -- Assigns one or more values & $sb to a variable .. Range operator Logical Operators 1..10 | foreach {$_ * 5} Comparison Operators -and, -or, -xor, -not, ! Connect expressions and -eq, -ne Equal, not equal statements, allowing you to test -is, -isnot Type evaluator (Boolean). -gt, -ge Greater than, greater than for multiple conditions Tells whether an object is an or equal to Redirection Operators instance of a specified .NET -lt, -le Less than, less than or >, >> The redirection operators enable Framework type. equal to you to send particular types of 42 –is [int] -replace changes the specified output (success, error, warning, elements of a value verbose, and debug) to files and -as Type convertor. -

The Programmer As a Young Dog
The Programmer as a Young Dog (1976) This autobiographical sketch describes the beginning of the author’s career at the Danish computer company Regnecentralen from 1963 to 1970. (The title is inspired by James Joyce’s “A Portrait of the Artist as a Young Man” and Dylan Thomas’s “Portrait of the Artist as a Young Dog.”) After three years in Regnecentralen’s compiler group, the author got the chance to design the architecture of the RC 4000 computer. In 1967, he became Head of the Software Development group that designed the RC 4000 multiprogramming system. The article was written in memory of Niels Ivar Bech, the dynamic director of Regnecentralen, who inspired a generation of young Danes to make unique contributions to computing. I came to Regnecentralen in 1963 to work with Peter Naur and Jrn Jensen. The two of them worked so closely together that they hardly needed to say anything to solve a problem. I remember a discussion where Peter was writing something on the blackboard, when Jrn suddenly said “but Peter ...” and immediately was interrupted with the reply “yes, of course, Jrn.” I swear that nothing else was said. It made quite an impression on me, especially since I didn’t even know what the discussion was about in the rst place. After a two-year apprenticeship as a systems programmer, I wanted to travel abroad and work for IBM in Winchester in Southern England. At that time Henning Isaksson was planning to build a process control computer for Haldor Topse, Ltd. Henning had asked Niels Ivar Bech for a systems programmer for quite some time.