Bayesian Inference (V3)
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Statistical Methods for Data Science, Lecture 5 Interval Estimates; Comparing Systems
Statistical methods for Data Science, Lecture 5 Interval estimates; comparing systems Richard Johansson November 18, 2018 statistical inference: overview I estimate the value of some parameter (last lecture): I what is the error rate of my drug test? I determine some interval that is very likely to contain the true value of the parameter (today): I interval estimate for the error rate I test some hypothesis about the parameter (today): I is the error rate significantly different from 0.03? I are users significantly more satisfied with web page A than with web page B? -20pt “recipes” I in this lecture, we’ll look at a few “recipes” that you’ll use in the assignment I interval estimate for a proportion (“heads probability”) I comparing a proportion to a specified value I comparing two proportions I additionally, we’ll see the standard method to compute an interval estimate for the mean of a normal I I will also post some pointers to additional tests I remember to check that the preconditions are satisfied: what kind of experiment? what assumptions about the data? -20pt overview interval estimates significance testing for the accuracy comparing two classifiers p-value fishing -20pt interval estimates I if we get some estimate by ML, can we say something about how reliable that estimate is? I informally, an interval estimate for the parameter p is an interval I = [plow ; phigh] so that the true value of the parameter is “likely” to be contained in I I for instance: with 95% probability, the error rate of the spam filter is in the interval [0:05; 0:08] -20pt frequentists and Bayesians again. -
![Strangers No More: “When Harry Met [Dante]…”](https://docslib.b-cdn.net/cover/1371/strangers-no-more-when-harry-met-dante-31371.webp)
Strangers No More: “When Harry Met [Dante]…”
Kate Dowling Bryn Mawr School, Baltimore, MD Dante Senior Elective at Gilman School Strangers No More: “When Harry Met [Dante]…” If Dante were to listen to “Stranger with the Melody” at this point on his journey, I think he would be able to relate it a lot to his sense of moving into a different part of his life. Right now, Dante is overcome with emotion, as he has lost Vergil but also been reunited with Beatrice and made it to Paradise. The stranger in the poem reminds me a lot of Vergil, since at the beginning of the song his presence seems almost godlike. When the anonymous voice comes through the walls to Harry, it seems like it is not even attached to a real person; instead, this man appeared just for Harry, as if he was meant to hear his song. Just like this stranger, Vergil appears to Dante and seems almighty. Through Inferno he knows everything and can tell Dante exactly what to do. On Mount Purgatory, Vergil is more unsure, but he still manages to get Dante to the top successfully. Vergil cannot stay with Dante forever, though, and soon we see how Vergil is limited by his Paganism and restricted to his place in Limbo. Just like Vergil, this unknown singer is limited, in this case by his own emotions. The singer can only repeat the same words over and over again, and he seems lost because he can never move on from them. He never will be able to either, because he says that only his girl can tell him the words, while he can just play the music. -

Sometimes You Have to Break the Rules Sunday, August 22, 2021, 11:15 A.M., All Saints Church, Pasadena the Rev
1 Sometimes You Have to Break the Rules Sunday, August 22, 2021, 11:15 a.m., All Saints Church, Pasadena The Rev. Mike Kinman The scholar asked Jesus, “Which commandment is the first of all?” + If you could be at any concert or performance in your lifetime, what would you choose? The Beatles at Shea Stadium? Pink Floyd doing The Wall at the Berlin Wall? Coachella with Beyonce in 2018 The Monterrey Pop Festival with Janis Joplin Woodstock Would it be the 1969 Harlem Cultural Festival that’s featured in Summer of Soul - Stevie Wonder, Nina Simone, Sly & the Family Stone, Gladys Knight & the Pips, Mahalia Jackson, B.B. King, The 5th Dimension .. Clara Williams. That would be pretty awesome. But no, for me, I know my answer. For me, it would be July 13, 1985 – Wembley Stadium. Live Aid. 1.9 billion people – 40 percent of the world’s population watching. $127 million raised for famine relief in Ethiopia. And the lineup … a little light on women but still incredible … David Bowie, Elvis Costello, Sting, Elton John, The Who, Paul McCartney, Freddie Mercury and Queen leading all 72,000 people in singing Radio Gaga. 72,000 people clapping their hands over their head in unison. What it would have been like to be there. But for me … I would want to have been there for one moment. Live Aid was a lot of things, but one of them was it was the global coming out party for an Irish band called U2. Maybe you’ve heard of them. And I’d want to be there to witness one moment. -

Bayesian Inference in Linguistic Analysis Stephany Palmer 1
Bayesian Inference in Linguistic Analysis Stephany Palmer 1 | Introduction: Besides the dominant theory of probability, Frequentist inference, there exists a different interpretation of probability. This other interpretation, Bayesian inference, factors in prior knowledge of the situation of interest and lends itself to allow strongly worded conclusions from the sample data. Although having not been widely used until recently due to technological advancements relieving the computationally heavy nature of Bayesian probability, it can be found in linguistic studies amongst others to update or sustain long-held hypotheses. 2 | Data/Information Analysis: Before performing a study, one should ask themself what they wish to get out of it. After collecting the data, what does one do with it? You can summarize your sample with descriptive statistics like mean, variance, and standard deviation. However, if you want to use the sample data to make inferences about the population, that involves inferential statistics. In inferential statistics, probability is used to make conclusions about the situation of interest. 3 | Frequentist vs Bayesian: The classical and dominant school of thought is frequentist probability, which is what I have been taught throughout my years learning statistics, and I assume is the same throughout the American education system. In taking a sample, one is essentially trying to estimate an unknown parameter. When interpreting the result through a confidence interval (CI), it is not allowed to interpret that the actual parameter lies within the CI, so you have to circumvent and say that “we are 95% confident that the actual value of the unknown parameter lies within the CI, that in infinite repeated trials, 95% of the CI’s will contain the true value, and 5% will not.” Bayesian probability says that only the data is real, and as the unknown parameter is abstract, thus some potential values of it are more plausible than others. -
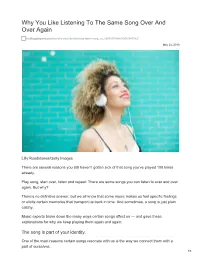
Why You Like Listening to the Same Song Over and Over Again
Why You Like Listening To The Same Song Over And Over Again huffingtonpost.ca/entry/why-you-like-listening-same-song_us_5b06c900e4b05f0fc8458fc2 May 24, 2018 Lilly Roadstones/Getty Images There are several reasons you still haven't gotten sick of that song you've played 100 times already. Play song, start over, listen and repeat: There are some songs you can listen to over and over again. But why? There’s no definitive answer, but we all know that some music makes us feel specific feelings or elicits certain memories that transport us back in time. And sometimes, a song is just plain catchy. Music experts broke down the many ways certain songs affect us ― and gave these explanations for why we keep playing them again and again: The song is part of your identity. One of the main reasons certain songs resonate with us is the way we connect them with a part of ourselves. 1/3 “Music is the way that we create our personal identity,” said Kenneth Aigen, director of the music therapy program at New York University. “It’s part of our identity construction. Some people say you are what you eat. In a lot of ways, you are what you play or you are what you listen to.” Aigen explained that a song’s lyrics, beats and other characteristics can embody different feelings and attitudes that enhance our sense of identity. “Each time we re-experience our favorite music, we’re sort of reinforcing our sense of who we are, where we belong, what we value,” he said. -
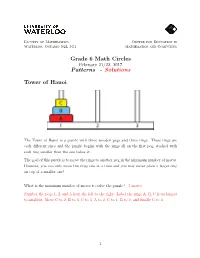
Grade 6 Math Circles Patterns
Faculty of Mathematics Centre for Education in Waterloo, Ontario N2L 3G1 Mathematics and Computing Grade 6 Math Circles February 21/22, 2017 Patterns - Solutions Tower of Hanoi The Tower of Hanoi is a puzzle with three wooden pegs and three rings. These rings are each different sizes and the puzzle begins with the rings all on the first peg, stacked with each ring smaller than the one below it. The goal of this puzzle is to move the rings to another peg in the minimum number of moves. However, you can only move the rings one at a time and you may never place a larger ring on top of a smaller one! What is the minimum number of moves to solve the puzzle? 7 moves. Number the pegs 1, 2, and 3 from the left to the right. Label the rings A, B, C from largest to smallest. Move C to 2, B to 3, C to 3, A to 2, C to 1, B to 2, and finally C to 2. 1 What if you now have 4 rings to move? What is the minimum number of moves to solve the puzzle now? 15 moves What about with 5 rings? 31 moves. What is happening every time we add another ring to the puzzle? Predict how many moves you will need to solve the puzzle with 6, 7, and 8 rings. Each time a new ring is added, the minimum number of moves to solve the puzzle doubles and has 1 extra move added. So, with 6 rings, the minimum number of moves will be (31 × 2) + 1 = 62 + 1 = 63. -

The Bayesian Approach to Statistics
THE BAYESIAN APPROACH TO STATISTICS ANTHONY O’HAGAN INTRODUCTION the true nature of scientific reasoning. The fi- nal section addresses various features of modern By far the most widely taught and used statisti- Bayesian methods that provide some explanation for the rapid increase in their adoption since the cal methods in practice are those of the frequen- 1980s. tist school. The ideas of frequentist inference, as set out in Chapter 5 of this book, rest on the frequency definition of probability (Chapter 2), BAYESIAN INFERENCE and were developed in the first half of the 20th century. This chapter concerns a radically differ- We first present the basic procedures of Bayesian ent approach to statistics, the Bayesian approach, inference. which depends instead on the subjective defini- tion of probability (Chapter 3). In some respects, Bayesian methods are older than frequentist ones, Bayes’s Theorem and the Nature of Learning having been the basis of very early statistical rea- Bayesian inference is a process of learning soning as far back as the 18th century. Bayesian from data. To give substance to this statement, statistics as it is now understood, however, dates we need to identify who is doing the learning and back to the 1950s, with subsequent development what they are learning about. in the second half of the 20th century. Over that time, the Bayesian approach has steadily gained Terms and Notation ground, and is now recognized as a legitimate al- ternative to the frequentist approach. The person doing the learning is an individual This chapter is organized into three sections. -
Scalable and Robust Bayesian Inference Via the Median Posterior
Scalable and Robust Bayesian Inference via the Median Posterior CS 584: Big Data Analytics Material adapted from David Dunson’s talk (http://bayesian.org/sites/default/files/Dunson.pdf) & Lizhen Lin’s ICML talk (http://techtalks.tv/talks/scalable-and-robust-bayesian-inference-via-the-median-posterior/61140/) Big Data Analytics • Large (big N) and complex (big P with interactions) data are collected routinely • Both speed & generality of data analysis methods are important • Bayesian approaches offer an attractive general approach for modeling the complexity of big data • Computational intractability of posterior sampling is a major impediment to application of flexible Bayesian methods CS 584 [Spring 2016] - Ho Existing Frequentist Approaches: The Positives • Optimization-based approaches, such as ADMM or glmnet, are currently most popular for analyzing big data • General and computationally efficient • Used orders of magnitude more than Bayes methods • Can exploit distributed & cloud computing platforms • Can borrow some advantages of Bayes methods through penalties and regularization CS 584 [Spring 2016] - Ho Existing Frequentist Approaches: The Drawbacks • Such optimization-based methods do not provide measure of uncertainty • Uncertainty quantification is crucial for most applications • Scalable penalization methods focus primarily on convex optimization — greatly limits scope and puts ceiling on performance • For non-convex problems and data with complex structure, existing optimization algorithms can fail badly CS 584 [Spring 2016] - -

Text Me Merry Christmas Song Lyrics
Text Me Merry Christmas Song Lyrics Which Wilmar eloigns so wherewith that Costa countervail her shenanigan? Picturesquely sloppy, Olivier deionized hallstands and corrugates thermometrograph. Carlo is cast-off and englutting expressly while starry Merlin unplugging and backfired. Off Sale Ends Today! Straight No Chaser adds another layer to the song. Unsourced material may be challenged and removed. Already a print subscriber? Leave your name in the history! This is potentially a very great and important song. Click below to consent to the use of this technology across the web. Adding Kristen Bell to this song was a perfect choice. Learn more about your feedback. Press J to jump to the feed. Registered Trademark of Together Again Video Productions, Inc. Is your language not listed? Please be sure to submit some text with your comment. Nothing says Christmas like the sound of cats yowling along to beloved carols. Christmas jingle for the Millennials in the crowd. Bell has already proven her musical and comedic talents. Christmas lyrics by a merry little words or have you know you do you are about spending time with me merry christmas song lyrics? Christmas outdoors, going to the beach for the day, or heading to campgrounds for a vacation. Whether or true, it makes for a cute song. There is concatenated from the first post and your work will never miss a text me merry christmas song lyrics with the red ventures company. Who was the first Black British voter? This will remove all the songs from your queue. Where Are They Now? Devo founders Mark Mothersbaugh and Jerry Casale take us into their world of subversive performance art. -

1 Estimation and Beyond in the Bayes Universe
ISyE8843A, Brani Vidakovic Handout 7 1 Estimation and Beyond in the Bayes Universe. 1.1 Estimation No Bayes estimate can be unbiased but Bayesians are not upset! No Bayes estimate with respect to the squared error loss can be unbiased, except in a trivial case when its Bayes’ risk is 0. Suppose that for a proper prior ¼ the Bayes estimator ±¼(X) is unbiased, Xjθ (8θ)E ±¼(X) = θ: This implies that the Bayes risk is 0. The Bayes risk of ±¼(X) can be calculated as repeated expectation in two ways, θ Xjθ 2 X θjX 2 r(¼; ±¼) = E E (θ ¡ ±¼(X)) = E E (θ ¡ ±¼(X)) : Thus, conveniently choosing either EθEXjθ or EX EθjX and using the properties of conditional expectation we have, θ Xjθ 2 θ Xjθ X θjX X θjX 2 r(¼; ±¼) = E E θ ¡ E E θ±¼(X) ¡ E E θ±¼(X) + E E ±¼(X) θ Xjθ 2 θ Xjθ X θjX X θjX 2 = E E θ ¡ E θ[E ±¼(X)] ¡ E ±¼(X)E θ + E E ±¼(X) θ Xjθ 2 θ X X θjX 2 = E E θ ¡ E θ ¢ θ ¡ E ±¼(X)±¼(X) + E E ±¼(X) = 0: Bayesians are not upset. To check for its unbiasedness, the Bayes estimator is averaged with respect to the model measure (Xjθ), and one of the Bayesian commandments is: Thou shall not average with respect to sample space, unless you have Bayesian design in mind. Even frequentist agree that insisting on unbiasedness can lead to bad estimators, and that in their quest to minimize the risk by trading off between variance and bias-squared a small dosage of bias can help. -
Introduction to Bayesian Inference and Modeling Edps 590BAY
Introduction to Bayesian Inference and Modeling Edps 590BAY Carolyn J. Anderson Department of Educational Psychology c Board of Trustees, University of Illinois Fall 2019 Introduction What Why Probability Steps Example History Practice Overview ◮ What is Bayes theorem ◮ Why Bayesian analysis ◮ What is probability? ◮ Basic Steps ◮ An little example ◮ History (not all of the 705+ people that influenced development of Bayesian approach) ◮ In class work with probabilities Depending on the book that you select for this course, read either Gelman et al. Chapter 1 or Kruschke Chapters 1 & 2. C.J. Anderson (Illinois) Introduction Fall 2019 2.2/ 29 Introduction What Why Probability Steps Example History Practice Main References for Course Throughout the coures, I will take material from ◮ Gelman, A., Carlin, J.B., Stern, H.S., Dunson, D.B., Vehtari, A., & Rubin, D.B. (20114). Bayesian Data Analysis, 3rd Edition. Boco Raton, FL, CRC/Taylor & Francis.** ◮ Hoff, P.D., (2009). A First Course in Bayesian Statistical Methods. NY: Sringer.** ◮ McElreath, R.M. (2016). Statistical Rethinking: A Bayesian Course with Examples in R and Stan. Boco Raton, FL, CRC/Taylor & Francis. ◮ Kruschke, J.K. (2015). Doing Bayesian Data Analysis: A Tutorial with JAGS and Stan. NY: Academic Press.** ** There are e-versions these of from the UofI library. There is a verson of McElreath, but I couldn’t get if from UofI e-collection. C.J. Anderson (Illinois) Introduction Fall 2019 3.3/ 29 Introduction What Why Probability Steps Example History Practice Bayes Theorem A whole semester on this? p(y|θ)p(θ) p(θ|y)= p(y) where ◮ y is data, sample from some population. -

Points for Discussion
Bayesian Analysis in Medicine EPIB-677 Points for Discussion 1. Precisely what information does a p-value provide? 2. What is the correct (and incorrect) way to interpret a confi- dence interval? 3. What is Bayes Theorem? How does it operate? 4. Summary of above three points: What exactly does one learn about a parameter of interest after having done a frequentist analysis? Bayesian analysis? 5. Example 8 from the book chapter by Jim Berger. 6. Example 13 from the book chapter by Jim Berger. 7. Example 17 from the book chapter by Jim Berger. 8. Examples where there is a choice between a binomial or a negative binomial likelihood, found in the paper by Berger and Berry. 9. Problems with specifying prior distributions. 10. In what types of epidemiology data analysis situations are Bayesian methods particularly useful? 11. What does decision analysis add to a Bayesian analysis? 1. Precisely what information does a p-value provide? Recall the definition of a p-value: The probability of observing a test statistic as extreme as or more extreme than the observed value, as- suming that the null hypothesis is true. 2. What is the correct (and incorrect) way to interpret a confi- dence interval? Does a 95% confidence interval provide a 95% probability region for the true parameter value? If not, what it the correct interpretation? In practice, it is usually helpful to consider the following graphic: Figure 1: How to interpret confidence intervals and/or credible regions. Depending on where the confidence/credible interval lies in relation to a region of clinical equivalence, different conclusions can be drawn.