CS 137 Part 8 Merge Sort, Quick Sort, Binary Search This Week
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Sort Algorithms 15-110 - Friday 2/28 Learning Objectives
Sort Algorithms 15-110 - Friday 2/28 Learning Objectives • Recognize how different sorting algorithms implement the same process with different algorithms • Recognize the general algorithm and trace code for three algorithms: selection sort, insertion sort, and merge sort • Compute the Big-O runtimes of selection sort, insertion sort, and merge sort 2 Search Algorithms Benefit from Sorting We use search algorithms a lot in computer science. Just think of how many times a day you use Google, or search for a file on your computer. We've determined that search algorithms work better when the items they search over are sorted. Can we write an algorithm to sort items efficiently? Note: Python already has built-in sorting functions (sorted(lst) is non-destructive, lst.sort() is destructive). This lecture is about a few different algorithmic approaches for sorting. 3 Many Ways of Sorting There are a ton of algorithms that we can use to sort a list. We'll use https://visualgo.net/bn/sorting to visualize some of these algorithms. Today, we'll specifically discuss three different sorting algorithms: selection sort, insertion sort, and merge sort. All three do the same action (sorting), but use different algorithms to accomplish it. 4 Selection Sort 5 Selection Sort Sorts From Smallest to Largest The core idea of selection sort is that you sort from smallest to largest. 1. Start with none of the list sorted 2. Repeat the following steps until the whole list is sorted: a) Search the unsorted part of the list to find the smallest element b) Swap the found element with the first unsorted element c) Increment the size of the 'sorted' part of the list by one Note: for selection sort, swapping the element currently in the front position with the smallest element is faster than sliding all of the numbers down in the list. -

Time Complexity
Chapter 3 Time complexity Use of time complexity makes it easy to estimate the running time of a program. Performing an accurate calculation of a program’s operation time is a very labour-intensive process (it depends on the compiler and the type of computer or speed of the processor). Therefore, we will not make an accurate measurement; just a measurement of a certain order of magnitude. Complexity can be viewed as the maximum number of primitive operations that a program may execute. Regular operations are single additions, multiplications, assignments etc. We may leave some operations uncounted and concentrate on those that are performed the largest number of times. Such operations are referred to as dominant. The number of dominant operations depends on the specific input data. We usually want to know how the performance time depends on a particular aspect of the data. This is most frequently the data size, but it can also be the size of a square matrix or the value of some input variable. 3.1: Which is the dominant operation? 1 def dominant(n): 2 result = 0 3 fori in xrange(n): 4 result += 1 5 return result The operation in line 4 is dominant and will be executedn times. The complexity is described in Big-O notation: in this caseO(n)— linear complexity. The complexity specifies the order of magnitude within which the program will perform its operations. More precisely, in the case ofO(n), the program may performc n opera- · tions, wherec is a constant; however, it may not performn 2 operations, since this involves a different order of magnitude of data. -

Quick Sort Algorithm Song Qin Dept
Quick Sort Algorithm Song Qin Dept. of Computer Sciences Florida Institute of Technology Melbourne, FL 32901 ABSTRACT each iteration. Repeat this on the rest of the unsorted region Given an array with n elements, we want to rearrange them in without the first element. ascending order. In this paper, we introduce Quick Sort, a Bubble sort works as follows: keep passing through the list, divide-and-conquer algorithm to sort an N element array. We exchanging adjacent element, if the list is out of order; when no evaluate the O(NlogN) time complexity in best case and O(N2) exchanges are required on some pass, the list is sorted. in worst case theoretically. We also introduce a way to approach the best case. Merge sort [4]has a O(NlogN) time complexity. It divides the 1. INTRODUCTION array into two subarrays each with N/2 items. Conquer each Search engine relies on sorting algorithm very much. When you subarray by sorting it. Unless the array is sufficiently small(one search some key word online, the feedback information is element left), use recursion to do this. Combine the solutions to brought to you sorted by the importance of the web page. the subarrays by merging them into single sorted array. 2 Bubble, Selection and Insertion Sort, they all have an O(N2) In Bubble sort, Selection sort and Insertion sort, the O(N ) time time complexity that limits its usefulness to small number of complexity limits the performance when N gets very big. element no more than a few thousand data points. -
Mergesort and Quicksort ! Merge Two Halves to Make Sorted Whole
Mergesort Basic plan: ! Divide array into two halves. ! Recursively sort each half. Mergesort and Quicksort ! Merge two halves to make sorted whole. • mergesort • mergesort analysis • quicksort • quicksort analysis • animations Reference: Algorithms in Java, Chapters 7 and 8 Copyright © 2007 by Robert Sedgewick and Kevin Wayne. 1 3 Mergesort and Quicksort Mergesort: Example Two great sorting algorithms. ! Full scientific understanding of their properties has enabled us to hammer them into practical system sorts. ! Occupy a prominent place in world's computational infrastructure. ! Quicksort honored as one of top 10 algorithms of 20th century in science and engineering. Mergesort. ! Java sort for objects. ! Perl, Python stable. Quicksort. ! Java sort for primitive types. ! C qsort, Unix, g++, Visual C++, Python. 2 4 Merging Merging. Combine two pre-sorted lists into a sorted whole. How to merge efficiently? Use an auxiliary array. l i m j r aux[] A G L O R H I M S T mergesort k mergesort analysis a[] A G H I L M quicksort quicksort analysis private static void merge(Comparable[] a, Comparable[] aux, int l, int m, int r) animations { copy for (int k = l; k < r; k++) aux[k] = a[k]; int i = l, j = m; for (int k = l; k < r; k++) if (i >= m) a[k] = aux[j++]; merge else if (j >= r) a[k] = aux[i++]; else if (less(aux[j], aux[i])) a[k] = aux[j++]; else a[k] = aux[i++]; } 5 7 Mergesort: Java implementation of recursive sort Mergesort analysis: Memory Q. How much memory does mergesort require? A. Too much! public class Merge { ! Original input array = N. -

Overview Parallel Merge Sort
CME 323: Distributed Algorithms and Optimization, Spring 2015 http://stanford.edu/~rezab/dao. Instructor: Reza Zadeh, Matriod and Stanford. Lecture 4, 4/6/2016. Scribed by Henry Neeb, Christopher Kurrus, Andreas Santucci. Overview Today we will continue covering divide and conquer algorithms. We will generalize divide and conquer algorithms and write down a general recipe for it. What's nice about these algorithms is that they are timeless; regardless of whether Spark or any other distributed platform ends up winning out in the next decade, these algorithms always provide a theoretical foundation for which we can build on. It's well worth our understanding. • Parallel merge sort • General recipe for divide and conquer algorithms • Parallel selection • Parallel quick sort (introduction only) Parallel selection involves scanning an array for the kth largest element in linear time. We then take the core idea used in that algorithm and apply it to quick-sort. Parallel Merge Sort Recall the merge sort from the prior lecture. This algorithm sorts a list recursively by dividing the list into smaller pieces, sorting the smaller pieces during reassembly of the list. The algorithm is as follows: Algorithm 1: MergeSort(A) Input : Array A of length n Output: Sorted A 1 if n is 1 then 2 return A 3 end 4 else n 5 L mergeSort(A[0, ..., 2 )) n 6 R mergeSort(A[ 2 , ..., n]) 7 return Merge(L, R) 8 end 1 Last lecture, we described one way where we can take our traditional merge operation and translate it into a parallelMerge routine with work O(n log n) and depth O(log n). -

Data Structures & Algorithms
DATA STRUCTURES & ALGORITHMS Tutorial 6 Questions SORTING ALGORITHMS Required Questions Question 1. Many operations can be performed faster on sorted than on unsorted data. For which of the following operations is this the case? a. checking whether one word is an anagram of another word, e.g., plum and lump b. findin the minimum value. c. computing an average of values d. finding the middle value (the median) e. finding the value that appears most frequently in the data Question 2. In which case, the following sorting algorithm is fastest/slowest and what is the complexity in that case? Explain. a. insertion sort b. selection sort c. bubble sort d. quick sort Question 3. Consider the sequence of integers S = {5, 8, 2, 4, 3, 6, 1, 7} For each of the following sorting algorithms, indicate the sequence S after executing each step of the algorithm as it sorts this sequence: a. insertion sort b. selection sort c. heap sort d. bubble sort e. merge sort Question 4. Consider the sequence of integers 1 T = {1, 9, 2, 6, 4, 8, 0, 7} Indicate the sequence T after executing each step of the Cocktail sort algorithm (see Appendix) as it sorts this sequence. Advanced Questions Question 5. A variant of the bubble sorting algorithm is the so-called odd-even transposition sort . Like bubble sort, this algorithm a total of n-1 passes through the array. Each pass consists of two phases: The first phase compares array[i] with array[i+1] and swaps them if necessary for all the odd values of of i. -

Quick Sort Algorithm Song Qin Dept
Quick Sort Algorithm Song Qin Dept. of Computer Sciences Florida Institute of Technology Melbourne, FL 32901 ABSTRACT each iteration. Repeat this on the rest of the unsorted region Given an array with n elements, we want to rearrange them in without the first element. ascending order. In this paper, we introduce Quick Sort, a Bubble sort works as follows: keep passing through the list, divide-and-conquer algorithm to sort an N element array. We exchanging adjacent element, if the list is out of order; when no evaluate the O(NlogN) time complexity in best case and O(N2) exchanges are required on some pass, the list is sorted. in worst case theoretically. We also introduce a way to approach the best case. Merge sort [4] has a O(NlogN) time complexity. It divides the 1. INTRODUCTION array into two subarrays each with N/2 items. Conquer each Search engine relies on sorting algorithm very much. When you subarray by sorting it. Unless the array is sufficiently small(one search some key word online, the feedback information is element left), use recursion to do this. Combine the solutions to brought to you sorted by the importance of the web page. the subarrays by merging them into single sorted array. 2 Bubble, Selection and Insertion Sort, they all have an O(N2) time In Bubble sort, Selection sort and Insertion sort, the O(N ) time complexity that limits its usefulness to small number of element complexity limits the performance when N gets very big. no more than a few thousand data points. -
Time Complexity of Algorithms
Time Complexity of Algorithms • If running time T(n) is O(f(n)) then the function f measures time complexity – Polynomial algorithms: T(n) is O(nk); k = const – Exponential algorithm: otherwise • Intractable problem: if no polynomial algorithm is known for its solution Lecture 4 COMPSCI 220 - AP G Gimel'farb 1 Time complexity growth f(n) Number of data items processed per: 1 minute 1 day 1 year 1 century n 10 14,400 5.26⋅106 5.26⋅108 7 n log10n 10 3,997 883,895 6.72⋅10 n1.5 10 1,275 65,128 1.40⋅106 n2 10 379 7,252 72,522 n3 10 112 807 3,746 2n 10 20 29 35 Lecture 4 COMPSCI 220 - AP G Gimel'farb 2 Beware exponential complexity ☺If a linear O(n) algorithm processes 10 items per minute, then it can process 14,400 items per day, 5,260,000 items per year, and 526,000,000 items per century ☻If an exponential O(2n) algorithm processes 10 items per minute, then it can process only 20 items per day and 35 items per century... Lecture 4 COMPSCI 220 - AP G Gimel'farb 3 Big-Oh vs. Actual Running Time • Example 1: Let algorithms A and B have running times TA(n) = 20n ms and TB(n) = 0.1n log2n ms • In the “Big-Oh”sense, A is better than B… • But: on which data volume can A outperform B? TA(n) < TB(n) if 20n < 0.1n log2n, 200 60 or log2n > 200, that is, when n >2 ≈ 10 ! • Thus, in all practical cases B is better than A… Lecture 4 COMPSCI 220 - AP G Gimel'farb 4 Big-Oh vs. -

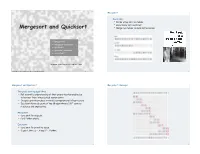
Heapsort Vs. Quicksort
Heapsort vs. Quicksort Most groups had sound data and observed: – Random problem instances • Heapsort runs perhaps 2x slower on small instances • It’s even slower on larger instances – Nearly-sorted instances: • Quicksort is worse than Heapsort on large instances. Some groups counted comparisons: • Heapsort uses more comparisons on random data Most groups concluded: – Experiments show that MH2 predictions are correct • At least for random data 1 CSE 202 - Dynamic Programming Sorting Random Data N Time (us) Quicksort Heapsort 10 19 21 100 173 293 1,000 2,238 5,289 10,000 28,736 78,064 100,000 355,949 1,184,493 “HeapSort is definitely growing faster (in running time) than is QuickSort. ... This lends support to the MH2 model.” Does it? What other explanations are there? 2 CSE 202 - Dynamic Programming Sorting Random Data N Number of comparisons Quicksort Heapsort 10 54 56 100 987 1,206 1,000 13,116 18,708 10,000 166,926 249,856 100,000 2,050,479 3,136,104 But wait – the number of comparisons for Heapsort is also going up faster that for Quicksort. This has nothing to do with the MH2 analysis. How can we see if MH2 analysis is relevant? 3 CSE 202 - Dynamic Programming Sorting Random Data N Time (us) Compares Time / compare (ns) Quicksort Heapsort Quicksort Heapsort Quicksort Heapsort 10 19 21 54 56 352 375 100 173 293 987 1,206 175 243 1,000 2,238 5,289 13,116 18,708 171 283 10,000 28,736 78,064 166,926 249,856 172 312 100,000 355,949 1,184,493 2,050,479 3,136,104 174 378 Nice data! – Why does N = 10 take so much longer per comparison? – Why does Heapsort always take longer than Quicksort? – Is Heapsort growth as predicted by MH2 model? • Is N large enough to be interesting?? (Machine is a Sun Ultra 10) 4 CSE 202 - Dynamic Programming .. -

A Short History of Computational Complexity
The Computational Complexity Column by Lance FORTNOW NEC Laboratories America 4 Independence Way, Princeton, NJ 08540, USA [email protected] http://www.neci.nj.nec.com/homepages/fortnow/beatcs Every third year the Conference on Computational Complexity is held in Europe and this summer the University of Aarhus (Denmark) will host the meeting July 7-10. More details at the conference web page http://www.computationalcomplexity.org This month we present a historical view of computational complexity written by Steve Homer and myself. This is a preliminary version of a chapter to be included in an upcoming North-Holland Handbook of the History of Mathematical Logic edited by Dirk van Dalen, John Dawson and Aki Kanamori. A Short History of Computational Complexity Lance Fortnow1 Steve Homer2 NEC Research Institute Computer Science Department 4 Independence Way Boston University Princeton, NJ 08540 111 Cummington Street Boston, MA 02215 1 Introduction It all started with a machine. In 1936, Turing developed his theoretical com- putational model. He based his model on how he perceived mathematicians think. As digital computers were developed in the 40's and 50's, the Turing machine proved itself as the right theoretical model for computation. Quickly though we discovered that the basic Turing machine model fails to account for the amount of time or memory needed by a computer, a critical issue today but even more so in those early days of computing. The key idea to measure time and space as a function of the length of the input came in the early 1960's by Hartmanis and Stearns. -
Selected Sorting Algorithms
Selected Sorting Algorithms CS 165: Project in Algorithms and Data Structures Michael T. Goodrich Some slides are from J. Miller, CSE 373, U. Washington Why Sorting? • Practical application – People by last name – Countries by population – Search engine results by relevance • Fundamental to other algorithms • Different algorithms have different asymptotic and constant-factor trade-offs – No single ‘best’ sort for all scenarios – Knowing one way to sort just isn’t enough • Many to approaches to sorting which can be used for other problems 2 Problem statement There are n comparable elements in an array and we want to rearrange them to be in increasing order Pre: – An array A of data records – A value in each data record – A comparison function • <, =, >, compareTo Post: – For each distinct position i and j of A, if i < j then A[i] ≤ A[j] – A has all the same data it started with 3 Insertion sort • insertion sort: orders a list of values by repetitively inserting a particular value into a sorted subset of the list • more specifically: – consider the first item to be a sorted sublist of length 1 – insert the second item into the sorted sublist, shifting the first item if needed – insert the third item into the sorted sublist, shifting the other items as needed – repeat until all values have been inserted into their proper positions 4 Insertion sort • Simple sorting algorithm. – n-1 passes over the array – At the end of pass i, the elements that occupied A[0]…A[i] originally are still in those spots and in sorted order. -

Chapter 19 Searching, Sorting and Big —Solutions
With sobs and tears he sorted out Those of the largest size … —Lewis Carroll Attempt the end, and never stand to doubt; Nothing’s so hard, but search will find it out. —Robert Herrick ’Tis in my memory lock’d, And you yourself shall keep the key of it. —William Shakespeare It is an immutable law in business that words are words, explanations are explanations, promises are promises — but only performance is reality. —Harold S. Green In this Chapter you’ll learn: ■ To search for a given value in an array using linear search and binary search. ■ To sort arrays using the iterative selection and insertion sort algorithms. ■ To sort arrays using the recursive merge sort algorithm. ■ To determine the efficiency of searching and sorting algorithms. © 2010 Pearson Education, Inc., Upper Saddle River, NJ. All Rights Reserved. 2 Chapter 19 Searching, Sorting and Big —Solutions Self-Review Exercises 19.1 Fill in the blanks in each of the following statements: a) A selection sort application would take approximately times as long to run on a 128-element array as on a 32-element array. ANS: 16, because an O(n2) algorithm takes 16 times as long to sort four times as much in- formation. b) The efficiency of merge sort is . ANS: O(n log n). 19.2 What key aspect of both the binary search and the merge sort accounts for the logarithmic portion of their respective Big Os? ANS: Both of these algorithms incorporate “halving”—somehow reducing something by half. The binary search eliminates from consideration one-half of the array after each comparison.