An Ionospheric Remote Sensing Method Using an Array of Narrowband Vlf Transmitters and Receivers
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Plasma Irregularities in the D-Region Ionosphere in Association with Sprite Streamer Initiation
ARTICLE Received 22 Oct 2013 | Accepted 27 Mar 2014 | Published 7 May 2014 DOI: 10.1038/ncomms4740 Plasma irregularities in the D-region ionosphere in association with sprite streamer initiation Jianqi Qin1, Victor P. Pasko1, Matthew G. McHarg2 & Hans C. Stenbaek-Nielsen3 Sprites are spectacular optical emissions in the mesosphere induced by transient lightning electric fields above thunderstorms. Although the streamer nature of sprites has been generally accepted, how these filamentary plasmas are initiated remains a subject of active research. Here we present observational and modelling results showing solid evidence of pre-existing plasma irregularities in association with streamer initiation in the D-region ionosphere. The video observations show that before streamer initiation, kilometre-scale spatial structures descend rapidly with the overall diffuse emissions of the sprite halo, but slow down and stop to form the stationary glow in the vicinity of the streamer onset, from where streamers suddenly emerge. The modelling results reproduce the sub-millisecond halo dynamics and demonstrate that the descending halo structures are optical manifestations of the pre-existing plasma irregularities, which might have been produced by thunderstorm or meteor effects on the D-region ionosphere. 1 Communications and Space Sciences Laboratory, Department of Electrical Engineering, Pennsylvania State University, University Park, Pennsylvania 16802, USA. 2 Department of Physics, United States Air Force Academy, Colorado Springs, Colorado 80840, USA. 3 Geophysical Institute, University of Alaska Fairbanks, Fairbanks, Alaska 99775, USA. Correspondence and requests for materials should be addressed to J.Q. (email: [email protected]). NATURE COMMUNICATIONS | 5:3740 | DOI: 10.1038/ncomms4740 | www.nature.com/naturecommunications 1 & 2014 Macmillan Publishers Limited. -

Observations of the Relationship Between Sprite Morphology and Incloud Lightning Processes
JOURNAL OF GEOPHYSICAL RESEARCH, VOL. 111, D15203, doi:10.1029/2005JD006879, 2006 Observations of the relationship between sprite morphology and in-cloud lightning processes Oscar A. van der Velde,1 A´ gnes Mika,2 Serge Soula,1 Christos Haldoupis,2 Torsten Neubert,3 and Umran S. Inan4 Received 10 November 2005; revised 30 March 2006; accepted 25 April 2006; published 4 August 2006. [1] During a thunderstorm on 23 July 2003, 15 sprites were captured by a LLTV camera mounted at the observatory on Pic du Midi in the French Pyre´ne´es. Simultaneous observations of cloud-to-ground (CG) and intracloud (IC) lightning activity from two independent lightning detection systems and a broadband ELF/VLF receiver allow a detailed study of the relationship between electrical activity in a thunderstorm and the sprites generated in the mesosphere above. Results suggest that positive CG and IC lightning differ for the two types of sprites most frequently observed, the carrot- and column-shaped sprites. Column sprites occur after a short delay (<30 ms) from the causative +CG and are associated with little VHF activity, suggesting no direct IC action on the charge transfer process. On the other hand, carrot sprites are delayed up to about 200 ms relative to their causative +CG stroke and are accompanied by a burst of VHF activity starting 25–75 ms before the CG stroke. While column sprites associate with short-lasting (less than 30 ms) ELF/VLF sferics, carrot sprites associate with bursts of sferics initiating at the time of the causative +CG discharge and persisting for 50 to 250 ms, indicating extensive in-cloud activity. -
Red Sprite Discharges in the Atmosphere at High Altitude: the Molecular Physics and the Similarity with Laboratory Discharges
INSTITUTE OF PHYSICS PUBLISHING PLASMA SOURCES SCIENCE AND TECHNOLOGY Plasma Sources Sci. Technol. 16 (2007) S13–S29 doi:10.1088/0963-0252/16/1/S02 TOPICAL REVIEW Red sprite discharges in the atmosphere at high altitude: the molecular physics and the similarity with laboratory discharges V P Pasko Communications and Space Sciences Laboratory, Department of Electrical Engineering, The Pennsylvania State University, University Park, PA 16802, USA E-mail: [email protected] Received 10 July 2006, in final form 4 December 2006 Published 31 January 2007 Online at stacks.iop.org/PSST/16/S13 Abstract An overview of the general phenomenology and physical mechanism of large-scale electrical discharges termed ‘sprites’ observed at high altitude in the Earth’s atmosphere above thunderstorms is presented. The primary emphasis is placed on summarizing available experimental data on various emissions documented to date from sprites and interpretation of these emissions in the context of similar data obtained from laboratory discharges, in particular the pulsed corona discharges, which are believed to be the closest pressure-scaled laboratory analogue of sprite discharges at high altitude. We also review some of the recent results on modelling of laboratory and sprite streamers emphasizing the importance of the photoionization effects for the understanding of the observed morphological features of streamers at different pressures in air and provide a comparison of emissions obtained from streamer models with results of recent satellite-based observations -

Upward Electrical Discharges from Thunderstorm Tops
UPWARD ELECTRICAL DISCHARGES FROM THUNDERSTORM TOPS BY WALTER A. LYONS, CCM, THOMAS E. NELSON, RUSSELL A. ARMSTRONG, VICTOR P. PASKO, AND MARK A. STANLEY Mesospheric lightning-related sprites and elves, not attached to their parent thunderstorm’s tops, are being joined by a family of upward electrical discharges, including blue jets, emerging directly from thunderstorm tops. or over 100 years, persistent eyewitness reports in (Wilson 1956). On the night of 6 July 1989, while the scientific literature have recounted a variety testing a low-light television camera (LLTV) for an Fof brief atmospheric electrical phenomena above upcoming rocket launch, the late Prof. John R. thunderstorms (Lyons et al. 2000). The startled ob- Winckler of the University of Minnesota made a most servers, not possessing a technical vocabulary with serendipitous observation. Replay of the video tape which to report their observations, used terms as var- revealed two frames showing brilliant columns of ied as “rocket lightning,” “cloud-to-stratosphere light extending far into the stratosphere above dis- lightning,” “upward lightning,” and even “cloud-to- tant thunderstorms (Franz et al. 1990). This single space lightning” (Fig. 1). Absent hard documenta- observation has energized specialists in scientific dis- tion, the atmospheric electricity community gave ciplines as diverse as space physics, radio science, at- little credence to such anecdotal reports, even one mospheric electricity, atmospheric acoustics, and originating with a Nobel Prize winner in physics -

Statistical Characteristics of Sprite Halo Events Using Coincident Photometric and Imaging Data R
GEOPHYSICAL RESEARCH LETTERS, VOL. 29, NO. 21, 2033, doi:10.1029/2001GL014480, 2002 Statistical Characteristics of Sprite Halo Events Using Coincident Photometric and Imaging Data R. Miyasato,1 M. J. Taylor,2 H. Fukunishi,1 and H. C. Stenbaek-Nielsen3 Received 29 November 2001; revised 2 March 2002; accepted 29 March 2002; published 13 November 2002. [1] Sprite halos are brief, diffuse flashes, which occur at cave shape is sometimes evident in the sprite halo. Bar- the top of a sprite and precede the development of streamer rington-Leigh et al. [2001] explained that this curved-shape structures at lower altitudes. We have investigated the indicates that significant ionization occurs in the lower characteristics of sprite halos in detail using coincident boundary of the sprite halos. Stenbaek-Nielsen et al. photometric and imaging data obtained during the [2000] also recorded images of sprites at 1 ms resolution Sprites’96 and ’99 campaign in Colorado and Wyoming, by a high-speed image intensified CCD camera. Using the USA. It is found that the average altitude of the centroid of same high-speed video system, Wescott et al. [2001] made the halo emission and the mean horizontal diameter of the three-dimensional triangulation of elves, sprite halos and halo events are 80 and 86 km, respectively, while the sprite streamers. average speed of the descending motion of the sprite halos [4] Veronis et al. [1999] developed a new two-dimensional was 4.3 Â 107 m/s. It was also found that the peak current cylindrically symmetric electromagnetic model which intensity of the causative CG decreases with time delay encompasses the effects of both the quasi-electrostatic (QE) from the onset of the sferics. -

Exploring the Earth's Magnetic Field
([SORULQJWKH(DUWK·V0DJQHWLF)LHOG $Q,0$*(6DWHOOLWH*XLGHWRWKH0DJQHWRVSKHUH An IMAGE Satellite Guide to Exploring the Earth’s Magnetic Field 1 $FNQRZOHGJPHQWV Dr. James Burch IMAGE Principal Investigator Dr. William Taylor IMAGE Education and Public Outreach Raytheon ITS and NASA Goddard SFC Dr. Sten Odenwald IMAGE Education and Public Outreach Raytheon ITS and NASA Goddard SFC Ms. Annie DiMarco This resource was developed by Greenwood Elementary School the NASA Imager for Brookville, Maryland Magnetopause-to-Auroral Global Exploration (IMAGE) Ms. Susan Higley Cherry Hill Middle School Information about the IMAGE Elkton, Maryland Mission is available at: http://image.gsfc.nasa.gov Mr. Bill Pine http://pluto.space.swri.edu/IMAGE Chaffey High School Resources for teachers and Ontario, California students are available at: Mr. Tom Smith http://image.gsfc.nasa.gov/poetry Briggs-Chaney Middle School Silver Spring, Maryland Cover Artwork: Image of the Earth’s ring current observed by the IMAGE, HENA instrument. Some representative magnetic field lines are shown in white. An IMAGE Satellite Guide to Exploring the Earth’s Magnetic Field 2 &RQWHQWV Chapter 1: What is a Magnet? , *UDGH 3OD\LQJ:LWK0DJQHWLVP ,, *UDGH ([SORULQJ0DJQHWLF)LHOGV ,,, *UDGH ([SORULQJWKH(DUWKDVD0DJQHW ,9 *UDGH (OHFWULFLW\DQG0DJQHWLVP Chapter 2: Investigating Earth’s Magnetism 9 *UDGH *UDGH7KH:DQGHULQJ0DJQHWLF3ROH 9, *UDGH 3ORWWLQJ3RLQWVLQ3RODU&RRUGLQDWHV 9,, *UDGH 0HDVXULQJ'LVWDQFHVRQWKH3RODU0DS 9,,, *UDGH :DQGHULQJ3ROHVLQWKH/DVW<HDUV ,; *UDGH 7KH0DJQHWRVSKHUHDQG8V -
Sprites Form at Plasma Irregularities in the Lower Ionosphere 7 May 2014
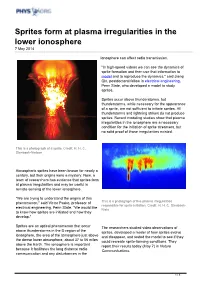
Sprites form at plasma irregularities in the lower ionosphere 7 May 2014 ionosphere can affect radio transmission. "In high-speed videos we can see the dynamics of sprite formation and then use that information to model and to reproduce the dynamics," said Jianqi Qin, postdoctoral fellow in electrical engineering, Penn State, who developed a model to study sprites. Sprites occur above thunderstorms, but thunderstorms, while necessary for the appearance of a sprite, are not sufficient to initiate sprites. All thunderstorms and lightning strikes do not produce sprites. Recent modeling studies show that plasma irregularities in the ionosphere are a necessary condition for the initiation of sprite streamers, but no solid proof of those irregularities existed. This is a photograph of a sprite. Credit: H. H. C. Stenbaek-Nielsen Atmospheric sprites have been known for nearly a century, but their origins were a mystery. Now, a team of researchers has evidence that sprites form at plasma irregularities and may be useful in remote sensing of the lower ionosphere. "We are trying to understand the origins of this phenomenon," said Victor Pasko, professor of This is a photograph of five plasma irregularities responsible for sprite initiation. Credit: H. H. C. Stenbaek- electrical engineering, Penn State. "We would like Niels to know how sprites are initiated and how they develop." Sprites are an optical phenomenon that occur The researchers studied video observations of above thunderstorms in the D region of the sprites, developed a model of how sprites evolve ionosphere, the area of the atmosphere just above and disappear, and tested the model to see if they the dense lower atmosphere, about 37 to 56 miles could recreate sprite-forming conditions. -

Current Moment in Sprite-Producing Lightning
Journal of Atmospheric and Solar-Terrestrial Physics 65 (2003) 499–508 www.elsevier.com/locate/jastp Current moment in sprite-producing lightning Steven A. Cummer∗ Electrical and Computer Engineering Department, Duke University, P.O. Box 90291, Hudson Hall 130, Durham, NC 27708, USA Abstract Studies of sprite-producing lightning have revealed much of what we currently know about the mechanisms responsible for this phenomenon. With a combination of new and previous results, we summarize the currently known quantitative characteristics of this special class of lightning. This information has come primarily from the quantitative analysis of the electromagnetic ÿelds produced by distant lightning. The long range of this technique has made it especially powerful, but there are important limitations on what can be measured that are related to the bandwidth of the measurement system. The lightning charge moment change required to initiate sprites varies across a relatively wide range, from approximately 100 –2000 C km. Note that this is not the total charge moment change in sprite producing lightning, which is by deÿnition greater than the initiation threshold. This range is in very good agreement with the predictions of streamer-based sprite modeling. We also summarize the strong evidence, from a variety of sources, in favor of sprite currents as the origin of ELF pulses seen in a signiÿcant fraction of sprite events. The largest events show sprite current moment amplitudes of ∼1000 kA km and sprite charge moment changes of at least 1200 C km, and perhaps signiÿcantly more. Lastly, we show that delayed sprites are generated from very strong continuing currents (20–60 kA km) following a +CG return stroke. -

Spring 18.Pub
Boston University College of Arts & Sciences Planet FormaonCenter for Space Physics through 2018 ‐ 2019 SPACE PHYSICS SEMINAR SERIES RadioOpcal PhenomenaEyes in Earth’s Ionosphere Part I: Above the Clouds: Lightning Sprites Sprite discharges are large scale natural plasma phenomena occurring due to penetraon of quasi‐electrostac lightning field to mesospheric/lower ionospheric altudes. It has been generally believed that sprites occur when the lightning field exceeds the convenonal breakdown threshold field, Ek, in the lower ionosphere. However, recent analysis of high‐speed video observaons of sprites and electromagnec measurements of lightning field found that sprite streamers oen appear in the lightning field below the breakdown field with a magnitude as low as 0.2Ek. Current sprite theory can’t offer a sasfactory explanaon to how sprite streamers can form in such low lightning fields. Recently, we have found that sprite streamers can be successfully iniated from ionospheric patches in a lightning field below Ek. The origin of those ionizaon patches may be aributed to ionospheric disturbances created by meteor trails, electrodynamic effects from thunderstorm and/or lightning, and gravity wave breaking. This is the first study showing that the sprite streamer iniaon mechanism that we proposed can explain the main properes of sprite streamer iniaon, including me scales, spaal scales, and speeds, observed by high‐speed cameras. Part II ‐ Subauroral ionosphere: S.T.E.V.E. Strong Thermal Emission Velocity Enhancement (STEVE) is an upper atmospheric phenomenon recently discovered through collaboraon between the scienfic community and cizen sciensts. Opcal data from an all‐sky imager (REGO at Lucy Lake) showed that STEVE is a narrow, mauve structure that forms south of the auroral oval (in the subauroral region) and Swarm satellite measurements [MacDonald et al., 2018]. -

VLF and ULF Waves Associated with Magnetospheric Substorms
VLF and ULF Waves Associated with Magnetospheric Substorms Andrew B. Collier PhD Thesis Department of Space and Plasma Physics School of Electrical Engineering Royal Institute of Technology Stockholm, Sweden May 2006 Andrew B. Collier VLF and ULF Waves Associated with Magnetospheric Substorms PhD Thesis. Department of Space and Plasma Physics, School of Electrical Engineering, Royal Institute of Technology, Stockholm, Sweden. May 2006. Abstract A magnetospheric substorm is manifested in a variety of phenomena observed both in space and on the ground. Two electromagnetic signatures are the Substorm Chorus Event (SCE) and Pi2 pulsations. The SCE is a Very Low Frequency (VLF) radio phenomenon observed on the ground after the onset of the substorm expansion phase. It consists of a band of VLF chorus with rising upper and lower cutoff frequencies. These emissions are thought to result from Doppler-shifted cyclotron resonance between whistler mode waves and energetic electrons which drift into an observer’s field of view from an injection site around midnight. The ascending frequency of the emission envelope has been attributed to the combined effects of energy dispersion due to gradient and curvature drifts and the modification of the resonance conditions resulting from the radial component of the E B drift. Two numerical models have been developed which × simulate the production of a SCE. One accounts for both radial and azimuthal electron drifts but treats the wave-particle interaction in an approximate fashion, while the other retains only the azimuthal drift but rigorously calculates both the electron anisotropy and the wave growth rate. Results from the latter model indicate that the injected electron population should have an enhanced high-energy tail in order to produce a realistic SCE. -

Electrical Parameters of Red Sprites
Atmósfera 25(4), 371-380 (2012) Electrical parameters of red sprites MANOJ KUMAR PARAS and JAGDISH RAI Department of Physics, Indian Institute of Technology Roorkee, Roorkee, Uttarakhand, Pin-247667, India Corresponding author: M. K. Paras; e-mail: [email protected] Received July 29, 2011; accepted July 1, 2012 RESUMEN Los duendes rojos son una clase exótica de rayos que surgen por arriba de las tormentas eléctricas. Se han obtenido expresiones de la velocidad y la corriente de estos fenómenos. La primera expresión es gaussiana. La corriente que fluye en el cuerpo del duende rojo se comporta de manera similar a una corriente de re- torno típica. Las variaciones en el tiempo del momento de corriente y del cambio en el momento de carga se han calculado con ayuda de las expresiones de velocidad y corriente. También se ha obtenido el campo de radiación eléctrica generado por el momento de corriente del duende. Este campo alcanza su máximo alrededor de los 40 Hz con una amplitud del orden de 10–5 V/m a 200 km del canal del duende. La energía total disipada en el cuerpo de los duendes rojos es del orden de 109 J. ABSTRACT Red sprites are the exotic kind of lightning above thunderstorms. Expressions for the velocity and current of sprites have been obtained. The velocity expression comes out to be Gaussian. The calculated current flow- ing in the sprite body behaves just like a typical lightning return stroke current. The variations of current moment and charge moment change with time have been calculated with the help of velocity and current expressions. -

On the Accuracy of Arrival Azimuth Determination of Sprite-Associated Lightning Flashes by Earth-Ionosphere Cavity Resonances
GEOPHYSICAL RESEARCH LETTERS, VOL 23, NO. 25, PAGES 3691-3694, DECEMBER 15, 1996 On the accuracy of arrival azimuth determination of sprite-associated lightning flashes by Earth-ionosphere cavity resonances Martin Fiillekrug and Steven C. Reising STAR Laboratory, Stanford University, California Walter A. Lyons ASTeR Inc., Ft. Collins, Colorado Abstract. Horizontal magnetic field variations in the convective system in the midwestern United States on frequency range of the Earth-ionosphere cavity reso July 15, 1995. Nineteen events were available at the nances are observed at Silberborn, Germany, simulta time of analysis and are investigated in this paper. The neous with 19 sprite-associated lightning flashes in the NLDN identified the times and locations of the sprite midwestern United States, on July 15, 1995. The mea associated lightning flashes (Table 1, columns 2-4) with sured horizontal magnetic intensities are linearly related a precision of ± 1 ms and ± 1km respectively. When to the horizontal magnetic intensities of slow tails of ra the NLDN did not report a flash, no entry is given in dio atmospherics which were simultaneously recorded the NLDN columns, and timing is provided by radio at Palmer Station, Antarctica. Enhancement of the atmospheric observations at Palmer Station, Antarc Earth-ionosphere cavity resonances is verified by spec tica (64.8° S, 64.0° W), after correction for propaga tral analysis, and the measured arrival azimuths are in agreement with the expected orientation of the Poynt tion delay [Reising ct al., 1996]. LLTV observations re ing vector along the great-circle path. The estimated ported 'elves' [Fukunishi et al., 1996] instead of sprites accuracy of the arrival azimuth determination is on the for events No.7 and 8 in Table 1.