I-Viii Verso Etc.Pmd
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

PSK31, MT63, and Hellschreiber
Digital Modes: the Future of Amateur Radio? An introduction to PSK31, MT63, and Hellschreiber John DeGood NU3E Trenton Computer Festival Sun 7 May 2000 1 PSK31 • Invented by Peter Martinez, G3PLX • First PC soundcard version 26 Dec 1998 • Intended for live keyboard-to-keyboard QSO • Uses varicode character coding for 50 wpm • Easy to use and monitor • Gives very good copy under low Eb/No numbers and is thus suitable for QRP 2 PSK31 (continued) • Instead of using FSK or on/off keying, uses BPSK or QPSK with a Viterbi decoder • Is available for free for many platforms, including Windows with soundcard • Uses advanced DSP and narrow bandwidth (31.25 Hz) techniques • Tx duty cycle is 50% idle, 90% maximum • The greatest activity is around 14070.15 3 Bandwidth BPSK QPSK Spectra obtained with EvmSpec (from PSK31 homepage) 4 PSK31 Operation • BPSK is generally used for calling CQ and routine operation • QPSK gives much better performance with fading and flutter • QPSK has an 800 msec one-way delay, or 1.6 sec round-trip • PSK31 requires a synth or stable VFO rig – BPSK tuning needs to be within 8 Hz – QPSK tuning needs to be within 4 Hz 5 MT63 • Developed by Patwel Jolocha SP9VRC • Encodes information using 63 modulated tones • Sounds unusual, like a roaring noise • No connection process, as in AMTOR, Packet, or PACTOR • Outstanding performance when conditions are both weak and unstable. 6 MT63 (continued) • Spreads signal in time (several seconds) and space (500-2000 Hz) • Forward Error Correction (7-bit ASCII encoded into 64 bits using a Walsh -
Digital Communications
CCARC - BPRA Ham Basics 2010 ---------- Welcome! Digital Communications “AMATEUR RADIO IS THE HOBBY… EMERGENCY COMMUNICATIONS IS A COMMITMENT…” 1 Ham Basics 2010 K7GJT‐ Digital Communications 2 Subjects to cover • Amateur Radio Digital Mode History • Two Basic Digital Technologies • TNC Technology, Modes & Software • Soundcard Technology, Modes & Software • Accuracy • Making the connection without wires • Making the connection with wires • Dig ita l MiMessaging Systems • Making the “over‐the‐air” connection with radio Ham Basics 2010 K7GJT‐ Digital Communications 3 Amateur Radio Digital Mode History • The ‘Original Digital’ mode – Presence or absence of carrier (1, 0, 1, 0, 1, etc.) – CW! Ham Basics 2010 K7GJT‐ Digital Communications 4 Amateur Radio Digital Mode History • Started as Mechanical Hardware Specific – 1849 Landline based teleprinter operations began – 1920 Rudolf Hell invented Hellschreiber – 1930’s RTTY (Radio TeleTYpp)e) [y[Military RATT/]/SCRT] • 1980’s started computerizing the RTTY signals • Prior to 1995 the only ‘legal’ HF digital mode that was authorized by the FCC were those that used the standard Baudot codes; ege.g. RTTY Ham Basics 2010 K7GJT‐ Digital Communications 5 Amateur Radio Digital Mode History • In 1995, the FCC opened to door to other modes (ASCII based) and declared that any new mode coding were legal as long as they were published in the public domain. • And the “Barn Door” opened! Ham Basics 2010 K7GJT‐ Digital Communications 6 Amateur Radio Digital Modes Ham Basics 2010 K7GJT‐ Digital Communications -
HF Digital Communications
HF Digital Communications How to work those strange sounds you hear on the air John Clements KC9ON Stephen H. Smith WA8LMF Joe Miller KJ8O John Mathieson AC8JW Brian Johnston W8TFI 1 May 2014 Contents Introductions Why Digital? Digital Modes of Operation Hardware : Radio, Computer, and interfaces Contents Software Tips and Tricks Q&A Introductions John Clements KC9ON Licensed in 1979 at age 16 Retired from electronics manufacturing and IT systems Active experimenter and home brewer [email protected] Introductions Stephen Smith WA8LMF Land-Mobile-Radio Systems & Field Engineer Ham since 1964 [email protected] Introductions Joe Miller KJ8O SWL since 1967, first licensed in 2006 and collects QSL cards President of OCARS (W8TNO) Certified Public Accountant [email protected] Introductions Brian Johnston W8TFI Licensed in 1976 Computer operator for a major newspaper Avid experimenter and home brewer [email protected] Introductions John Mathieson AC8JW Licensed since about 2005 Active in CW and digital modes [email protected] Why Digital? Send and receive text, images, data, and audio Some modes work very well in noisy and weak signal environments If you can’t hear them you can’t work them is no longer true! Why Digital? Some modes can provide error free or reduced error transmissions. Good for Emergency Communications Why Digital? Many modes use smaller bandwidths than voice 97.1(b) contribute to the advancement of the radio art. 97.313(a) use the minimum transmitter power necessary to carry out the desired -
DM-780 Users Guide Ham Radio Deluxe V6.0
HRD Software LLC DM-780 Users Guide Ham Radio Deluxe V6.0 By Tim Browning (KB3NPH) 2013 HRD Software LLC DM-780 Users Guide Table of Contents Overview ....................................................................................................................................................... 3 Audio Interfacing........................................................................................................................................... 4 Program Option Descriptions ....................................................................................................................... 8 Getting Started ............................................................................................................................................ 10 QSO Tag and My Station Set up .............................................................................................................. 11 My Station Set Up ................................................................................................................................... 12 Default Display ............................................................................................................................................ 14 Main Display with Waterfall ................................................................................................................... 14 Main Display with ALE and Modes Panes ............................................................................................... 15 Modes, Tags and Macros Panes ............................................................................................................. -
Thosedigitalmodes
THOSE DIGITAL MODES LARRY TELLES, K6SPP – FEBRUARY 2013 WHY DIGITAL MODES? • POWER NECESSARY • BASIC COMMUNICATIONS • BAND CONDITIONS • EMERGENCY COMMUNICATIONS • COST OF NECESSARY EQUIPMENT • BEST OF ALL TOPICS OF THIS TALK • FIVE BASIC COMPONENTS FOR DIGITAL MODES • CABLES AND CONNECTORS NEEDED • INTERFACE (COMPUTER TO TRANSCEIVER) • TYPES OF DIGITAL MODES • SOFTWARE NECESSARY HARDWARE – FOUR COMPONENTS 80-10 METER TRANSCEIVER FROM EXTERNAL SPEAKER (SOUND CARD) TO MIC INPUT PUSH RASCAL TO TALK OR SIMILAR DEVICE (COM PORT) CONTROL CABLE SIMPLE CABLE INTERFACE COMPUTER & SSB SOUND CARD TRANSCEIVER INPUT SPEAKER OUT OUTPUT MICROPHONE IN INPUT TRANSMIT, OUTPUT RECEIVE, RASCAL AND SERIAL PTT PORT DB-9 DIGITAL MODE (RECEIVE ONLY) INTERFACE DEVICE SOUNDCARD INPUT EXT SPEAKER (OUTPUT) HOMEBREW RASCAL TYPICAL KENWOOD MIC CONNECTOR SOUND CARD END FROM RCV AUDIO ON MIC CONNECTOR INPUT (IF AVAILABLE or ext speaker jack on transceiver) TO MIC AUDIO INPUT OUTPUT 2N2222 TO PTT ON MIC 1 CONNECTOR 6 2.2 K 2 7 RTS 3 8 1N4001 4 DTR 1N4001 9 5 GND (CONTROL) TO GROUND ON MIC CONNECTOR INTERFACE CAUTION (ISOLATION & ATTENUATION) ANOTHER HOMEBREW RASCAL THE USB CONNECTOR • ALL NEW LAPTOP & DESKTOP COMPUTERS NO LONGER HAS COM PORTS. • A COM PORT TO USB (UNIVERSAL SERIAL BUS) CONVERTER MUST BE USED. THOSE DIGITAL MODES • PACKET • Written Record • Faster Than Voice THOSE DIGITAL MODES • PSK31 • Most Popular Mode • Narrow Bandwidth THOSE DIGITAL MODES • RTTY • Each Bit 22ms Long • 45 Baud Most popular THOSE DIGITAL MODES • AMTOR • FSK Modulation • Not Very Popular -
English Help File by Colin Bell, 2E0BPP. To
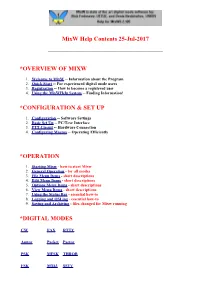
MixW Help Contents 25-Jul-2017 _________________________________________________________ *OVERVIEW OF MIXW 1. Welcome to MixW -- Information about the Program 2. Quick Start -- For experienced digital mode users 3. Registration -- How to become a registered user 4. Using the MixWHelp System -- Finding Information! *CONFIGURATION & SET UP 1. Configuration -- Software Settings 2. Basic Set Up -- PC/Tcvr Interface 3. PTT Circuit -- Hardware Connection 4. Configuring Macros -- Operating Efficiently *OPERATION 1. Starting Mixw - how to start Mixw 2. General Operation - for all modes 3. File Menu Items - short descriptions 4. Edit Menu Items - short descriptions 5. Options Menu Items - short descriptions 6. View Menu Items - short descriptions 7. Using the Status Bar - essential how-to 8. Logging and QSLing - essential how-to 9. Saving and Archiving - files changed for Mixw running *DIGITAL MODES CW FAX RTTY Amtor Packet Pactor PSK MFSK THROB FSK MT63 SSTV Hellschreiber Olivia Contestia RTTYM *APPENDICES 1. Cat Bar/Cat config and Bands.ini 2. Contest Operation 3. DX Cluster 4. FAQ's 5. File Descriptions 6. HF Digital Modes Band Plan 7. Keyboard Shortcuts 8. Macro Commands 9. MixW External Resources 10. MixW Installation 11. MixW Release History 12. QSLPRINT.EXE 13. Script Commands 14. The Eye of a Needle (TEOAN) 15. TNC Configuration and Operation 16. Using MixW Voice Keying 17. Using MixW with DXAtlas 18. Using MixW with other programs, DDE 19. Using the Spectrum Display 20. Using the Waterfall--Step by Step *Help Index *OVERVIEW OF MIXW _________________________________________________________ 1. Welcome to MixW -- Information about the Program 2. Quick Start -- For experienced digital mode users 3. Registration -- How to become a registered user 4. -

An MFSK Mode for HF DX
An MFSK Mode for HF DX Murray Greenman ZL1BPU 94 Sim Rd, Karaka, RD 1 Papakura, New Zealand [email protected] Nino Porcine IZ8BLY Via dei Tulipani 2 1, 89 133 Reggio Calabria, Italy [email protected] Abstract Development of a very robust and sensitive modem for Amateur DX use. A description of the main problems involved in receiving digital modes on HF, and ways to counter them; a brief history of MFSK, and a description of MFSK technology. A description of the design process of a new MFSK mode for amateurs, its performance, and the software used to demonstrate it. Concept Multi-tone FSK modes have never until now been used in Amateur radio circles, and it is hard to understand why. Examples of these modes do exist, for example some of the older robust radio-teletype modes used for fixed links in the diplomatic service. The author was dissatisfied with the DX performance of existing HF rag-chew modes, such as RTTY, PSK3 1 and MT63, especially on long path, and decided to tackle the solution to reliable digital DX communications by fast considering the problems. An analysis of these prompted an investigation of slow baud rate multi-tone FSK to counter multi-path problems, while retaining immunity to Doppler flutter. An appreciation of the performance of historical robust modes, especially Piccolo, led to the idea of replicating something similar in a modem environment, making the most of the DSP forces now available. The idea was of course to achieve and confirm the performance promised in theory, and claimed in the papers of the time. -

Amateur HF Digital Modes Wayne Amateur Radio Club – Dave Balint, N8IW – 3/16/2006
Amateur HF Digital Modes Wayne Amateur Radio Club – Dave Balint, N8IW – 3/16/2006 How To Monitor All you need is a computer with a sound card that has a microphone input or preferably a line level input. If you only have a microphone input an attenuating cable (available at Radio Shack) may be helpful. Run the audio out from the radio to the microphone/line input on the computer sound card How To Transmit The easiest way is to use on of the sound card interface devices. These devices allow you to interface the audio out from your computer sound card into the microphone or data mode input on your transceiver. They can be set so that either the interface device keys your radio, or you can simply let the VOX circuit do it. Rig Blaster Nomic, Plus and Pro: http://www.westmountainradio.com/RIGblaster.htm MFJ model MFJ-1275: http://www.mfjenterprises.com/products.php?prodid=MFJ-1275 SignaLink SL-1 and SL-1+: http://www.tigertronics.com/sl_main.htm RigExpert (including Tiny and Plus) http://www.mixw.net/RigExpertPlus/index.html http://www.mixw.net/RigExpert/index.html http://www.mixw.net/RigExpertTiny/index.html Some of the newer TNCs support the traditional modes such as RTTY and also now include PSK31 Timewave PK-232 DSP: http://www.timewave.com/PK232PSK.html Kantronics KAM-XL: http://www.kantronics.com/products/kamxl.html A common problem when transmitting is overdriving the audio. Use the ALC meter if available, or try increasing mic gain just to the point where the transmitter power doesn't increase any more. -
Mixw202 HELP CONTENTS TABLE
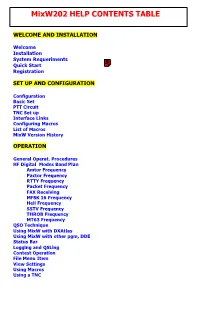
MixW202 HELP CONTENTS TABLE WELCOME AND INSTALLATION Welcome Installation System Requeriments Quick Start Registration SET UP AND CONFIGURATION Configuration Basic Set PTT Circuit TNC Set up Interface Links Configuring Macros List of Macros MixW Version History OPERATION General Operat. Procedures HF Digital Modes Band Plan Amtor Frequency Pactor Frequency RTTY Frequency Packet Frequency FAX Receiving MFSK 16 Frequency Hell Frequency SSTV Frequency THROB Frequency MT63 Frequency QSO Technique Using MixW with DXAtlas Using MixW with other pgm, DDE Status Bar Logging and QSLing Contest Operation File Menu Item View Settings Using Macros Using a TNC DIGITAL MODES RTTY RTTY Intro and Theory RTTY Operation PSK 31 and BPSK 31 PSK 31 Intro and Theory PSK 31 Operation MFSK MFSK Intro and Theory MFSK 16 Operation PACTOR Pactor Introduction and Theory Pactor Operation AMTOR Amtor Introduction and Theory Amtor Operation PACKET BBS Commands TCP/IP over AX25 HF Packet Introduction HF Packet Operation VHF/UHF Packet Introduction VHF/UHF Packet Operation DX Cluster CW CW Introduction CW Operation HELLSCHREIBER Hell Introduction and Theory Hell Operation SSTV SSTV Introduction SSTV Operation THROB Throb Introduction and Theory Throb Operation FSK 31 FSK 31 Theory and Operation MT 63 MT 63 Introduction and Theory MT 63 Operation FAX FAX receiving Welcome to MixW version 2.02 State of the art digital mode software by Nick Fedoseev, UT2UZ and Denis Nechitailov UU9JDR. Help files by Scott E. Thile, K4SET The Demo version is good for 15 days, for registration information please see Registration MixW stands for a Mixture of different modes. With this release of Version 2.02, MixW now fully supports CW, BPSK31, QPSK31, MFSK, RTTY, FSK31, Packet (HF and VHF), Pactor RX/TX (TX requires TNC), Amtor (Sitor) TX/RX (No TNC needed), Hellschreiber, FAX (RX only), SSTV, THROB, and MT63. -
History of APRS 1992 APRSTM Was First Introduced by Bob Bruninga, WB4APR, in the Fall of 1992 at the ARRL Computer Networking Conference in Teaneck, New Jersey
CONFERENCE Puget Sound Amateur Radio TCP/IP Group Boeing Employees Amateur Radio Society (BEARS) ’ v - Conference Coordinators: / Steve Stroh, N8GNJ Keith Justice, KF7TP Steve Ford, WBSIMY Greg Jones, WD5IVD American Radio Relay League, Inc. 225 Main Street Newington, CT 06111-1494 USA tel: 860-594-0200 WWW: http:llwww.arrl.org/ Tucson Amateur Packet Radio 8987-309 E. Tanque Verde Rd #337 Tucson, Arizona 85749-9399 USA tel: 817-383-000 WWW: http://www.tapr.org Copyright 0 1996 by The American Radio Relay League, Inc. Copyright secured under the Pan-American Convention International Copyright secured This work is Publication Number 244 of the Radio Amateur’s Library, published by the League. All rights reserved. No part of this work may be reproduced in any form except by written permission of the publisher. All rights of translation reserved. Printed in USA Quedan reservados todos 10s derechos ISBN: O-87259-568-4 ARRL Order Number: 5684 First Edition On Amateur Digital Communications This is the first time I’ve participated in an ARRL Digital Communications Conference. I know that these conferences have served as a sounding board for technical ideas. Some have become standards and accepted by the mainstream. Amateur packet radio is certainly an example of amateurs contributing to the state-of-the-art. The League is now faced with increasing difficulty justifying our precious spectrum. It doesn’t at all reflect poorly on amateurs. The problem is that commercial services are seeking spectrum, on a shared basis if necessary, when they can’t get exclusive allocations. If you’d asked me earlier this year if extensive amateur use of a band would protect it against encroachment, I would have said “yes.” You will remember the saying, “Use it or lose it.” Well, we certainly can lose a band by not using it. -

Beginners' Guide to Fldigi
Beginners' Guide to Fldigi 1. Beginners' Questions Answered 1.1. What is Fldigi? Fldigi is a computer program intended for Amateur Radio Digital Modes operation using a PC (Personal Computer). Fldigi operates (as does most similar software) in conjunction with a conventional HF SSB radio transceiver, and uses the PC sound card as the main means of input from the radio, and output to the radio. These are audio- frequency signals. The software also controls the radio by means of another connection, typically a serial port. Fldigi is multi-mode, which means that it is able to operate many popular digital modes without switching programs, so you only have one program to learn. Fldigi includes all the popular modes, such as DominoEX, MFSK16, PSK31, and RTTY. Unusually, Fldigi is available for multiple computer operating systems; FreeBSD™; Linux™, OS X™ and Windows™. 1.2. What is a Digital Mode? Digital Modes are a means of operating Amateur radio from the computer keyboard. The computer acts as modem (modulator - demodulator), as well as allowing you to type, and see what the other person types. It also controls the transmitter, changes modes as required, and provides various convenient features such as easy tuning of signals and prearranged messages. In this context, we are talking about modes used on the HF (high frequency) bands, specifically chat modes, those used to have a regular conversation in a similar way to voice or Morse, where one operator talks for a minute or two, then another does the same. These chat modes allow multiple operators to take part in a net. -

RTTY Journal© P.O
The New RTTY Journal© P.O. Box 236, Champaign, IL 61824-0236 Volume 46, Number 3, August 1998 Taka (Takashi Yoshizaki), JA3BN, shares his shack with us. Hits and Misses . .3RTTY Contesting . .10 Yet Another Comparison - Digital Modes . .41997 ANARTS Results . .11 A Little TTY History . .61998 CQ/RJ WWRTTY DX Contest . .12 On The Road -NADCOMM . .6Fall Contest Schedule . .13 Field Day 1998 . .7,13Book Reviews . .14 Switch It . .8Classified Ads . .14 The HALRTTY-1 is an easy to use and very accurate tuning indicator. It may be used with virtually any FSK modem, TNC, multi-mode controller, demodulator, and receiver or transceiver. The crossed LED bars show correct tuning for all popular FSK modes including Baudot Teletype (RTTY), ASCII Teletype, AMTOR, SITOR, P-Mode*, and even HFPacket Radio. Just hook it to your receiver’s audio output and you’re in business, even with modems that do not include “scope” output connectors. *The word “P-Mode” is the HAL designation for a communications protocol that may be also known as “Pactor” a registered trademark of the Spezielle Communications System GmbH (SCS) firm in Hanau, Germany. HAL affirms that, to the best of its knowledge, “P-Mode” is compatible and interoperable with the protocol SCS calls “Pactor” and with the link establishment and weak signal modes of the protocol SCScalls “Pactor-II”. Ellie (Jr. Op:KB9SIZ) Bill Henry, K9GWT Carlos Vial, CE3FCF Long time RTTY Op, Carlos, stopped by for an Eyeball QSO on June 18. The New Page 2 RTTY Journal August 1998 The New RTTY Journal© Hits & Misses George W.(Bill) Henry, K9GWT Publisher and Editor Bill Henry, K9GWT [email protected] All Correspondence: P.O.