Discriminants, Resultants and Multidimensional Determinants, By
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Solving Cubic Polynomials
Solving Cubic Polynomials 1.1 The general solution to the quadratic equation There are four steps to finding the zeroes of a quadratic polynomial. 1. First divide by the leading term, making the polynomial monic. a 2. Then, given x2 + a x + a , substitute x = y − 1 to obtain an equation without the linear term. 1 0 2 (This is the \depressed" equation.) 3. Solve then for y as a square root. (Remember to use both signs of the square root.) a 4. Once this is done, recover x using the fact that x = y − 1 . 2 For example, let's solve 2x2 + 7x − 15 = 0: First, we divide both sides by 2 to create an equation with leading term equal to one: 7 15 x2 + x − = 0: 2 2 a 7 Then replace x by x = y − 1 = y − to obtain: 2 4 169 y2 = 16 Solve for y: 13 13 y = or − 4 4 Then, solving back for x, we have 3 x = or − 5: 2 This method is equivalent to \completing the square" and is the steps taken in developing the much- memorized quadratic formula. For example, if the original equation is our \high school quadratic" ax2 + bx + c = 0 then the first step creates the equation b c x2 + x + = 0: a a b We then write x = y − and obtain, after simplifying, 2a b2 − 4ac y2 − = 0 4a2 so that p b2 − 4ac y = ± 2a and so p b b2 − 4ac x = − ± : 2a 2a 1 The solutions to this quadratic depend heavily on the value of b2 − 4ac. -

Using Elimination to Describe Maxwell Curves Lucas P
Louisiana State University LSU Digital Commons LSU Master's Theses Graduate School 2006 Using elimination to describe Maxwell curves Lucas P. Beverlin Louisiana State University and Agricultural and Mechanical College Follow this and additional works at: https://digitalcommons.lsu.edu/gradschool_theses Part of the Applied Mathematics Commons Recommended Citation Beverlin, Lucas P., "Using elimination to describe Maxwell curves" (2006). LSU Master's Theses. 2879. https://digitalcommons.lsu.edu/gradschool_theses/2879 This Thesis is brought to you for free and open access by the Graduate School at LSU Digital Commons. It has been accepted for inclusion in LSU Master's Theses by an authorized graduate school editor of LSU Digital Commons. For more information, please contact [email protected]. USING ELIMINATION TO DESCRIBE MAXWELL CURVES A Thesis Submitted to the Graduate Faculty of the Louisiana State University and Agricultural and Mechanical College in partial ful¯llment of the requirements for the degree of Master of Science in The Department of Mathematics by Lucas Paul Beverlin B.S., Rose-Hulman Institute of Technology, 2002 August 2006 Acknowledgments This dissertation would not be possible without several contributions. I would like to thank my thesis advisor Dr. James Madden for his many suggestions and his patience. I would also like to thank my other committee members Dr. Robert Perlis and Dr. Stephen Shipman for their help. I would like to thank my committee in the Experimental Statistics department for their understanding while I completed this project. And ¯nally I would like to thank my family for giving me the chance to achieve a higher education. -

Elements of Chapter 9: Nonlinear Systems Examples
Elements of Chapter 9: Nonlinear Systems To solve x0 = Ax, we use the ansatz that x(t) = eλtv. We found that λ is an eigenvalue of A, and v an associated eigenvector. We can also summarize the geometric behavior of the solutions by looking at a plot- However, there is an easier way to classify the stability of the origin (as an equilibrium), To find the eigenvalues, we compute the characteristic equation: p Tr(A) ± ∆ λ2 − Tr(A)λ + det(A) = 0 λ = 2 which depends on the discriminant ∆: • ∆ > 0: Real λ1; λ2. • ∆ < 0: Complex λ = a + ib • ∆ = 0: One eigenvalue. The type of solution depends on ∆, and in particular, where ∆ = 0: ∆ = 0 ) 0 = (Tr(A))2 − 4det(A) This is a parabola in the (Tr(A); det(A)) coordinate system, inside the parabola is where ∆ < 0 (complex roots), and outside the parabola is where ∆ > 0. We can then locate the position of our particular trace and determinant using the Poincar´eDiagram and it will tell us what the stability will be. Examples Given the system where x0 = Ax for each matrix A below, classify the origin using the Poincar´eDiagram: 1 −4 1. 4 −7 SOLUTION: Compute the trace, determinant and discriminant: Tr(A) = −6 Det(A) = −7 + 16 = 9 ∆ = 36 − 4 · 9 = 0 Therefore, we have a \degenerate sink" at the origin. 1 2 2. −5 −1 SOLUTION: Compute the trace, determinant and discriminant: Tr(A) = 0 Det(A) = −1 + 10 = 9 ∆ = 02 − 4 · 9 = −36 The origin is a center. 1 3. Given the system x0 = Ax where the matrix A depends on α, describe how the equilibrium solution changes depending on α (use the Poincar´e Diagram): 2 −5 (a) α −2 SOLUTION: The trace is 0, so that puts us on the \det(A)" axis. -
![Arxiv:1810.05857V3 [Math.AG] 11 Jun 2020](https://docslib.b-cdn.net/cover/9062/arxiv-1810-05857v3-math-ag-11-jun-2020-499062.webp)
Arxiv:1810.05857V3 [Math.AG] 11 Jun 2020
HYPERDETERMINANTS FROM THE E8 DISCRIMINANT FRED´ ERIC´ HOLWECK AND LUKE OEDING Abstract. We find expressions of the polynomials defining the dual varieties of Grass- mannians Gr(3, 9) and Gr(4, 8) both in terms of the fundamental invariants and in terms of a generic semi-simple element. We restrict the polynomial defining the dual of the ad- joint orbit of E8 and obtain the polynomials of interest as factors. To find an expression of the Gr(4, 8) discriminant in terms of fundamental invariants, which has 15, 942 terms, we perform interpolation with mod-p reductions and rational reconstruction. From these expressions for the discriminants of Gr(3, 9) and Gr(4, 8) we also obtain expressions for well-known hyperdeterminants of formats 3 × 3 × 3 and 2 × 2 × 2 × 2. 1. Introduction Cayley’s 2 × 2 × 2 hyperdeterminant is the well-known polynomial 2 2 2 2 2 2 2 2 ∆222 = x000x111 + x001x110 + x010x101 + x100x011 + 4(x000x011x101x110 + x001x010x100x111) − 2(x000x001x110x111 + x000x010x101x111 + x000x100x011x111+ x001x010x101x110 + x001x100x011x110 + x010x100x011x101). ×3 It generates the ring of invariants for the group SL(2) ⋉S3 acting on the tensor space C2×2×2. It is well-studied in Algebraic Geometry. Its vanishing defines the projective dual of the Segre embedding of three copies of the projective line (a toric variety) [13], and also coincides with the tangential variety of the same Segre product [24, 28, 33]. On real tensors it separates real ranks 2 and 3 [9]. It is the unique relation among the principal minors of a general 3 × 3 symmetric matrix [18]. -

Effective Noether Irreducibility Forms and Applications*
Appears in Journal of Computer and System Sciences, 50/2 pp. 274{295 (1995). Effective Noether Irreducibility Forms and Applications* Erich Kaltofen Department of Computer Science, Rensselaer Polytechnic Institute Troy, New York 12180-3590; Inter-Net: [email protected] Abstract. Using recent absolute irreducibility testing algorithms, we derive new irreducibility forms. These are integer polynomials in variables which are the generic coefficients of a multivariate polynomial of a given degree. A (multivariate) polynomial over a specific field is said to be absolutely irreducible if it is irreducible over the algebraic closure of its coefficient field. A specific polynomial of a certain degree is absolutely irreducible, if and only if all the corresponding irreducibility forms vanish when evaluated at the coefficients of the specific polynomial. Our forms have much smaller degrees and coefficients than the forms derived originally by Emmy Noether. We can also apply our estimates to derive more effective versions of irreducibility theorems by Ostrowski and Deuring, and of the Hilbert irreducibility theorem. We also give an effective estimate on the diameter of the neighborhood of an absolutely irreducible polynomial with respect to the coefficient space in which absolute irreducibility is preserved. Furthermore, we can apply the effective estimates to derive several factorization results in parallel computational complexity theory: we show how to compute arbitrary high precision approximations of the complex factors of a multivariate integral polynomial, and how to count the number of absolutely irreducible factors of a multivariate polynomial with coefficients in a rational function field, both in the complexity class . The factorization results also extend to the case where the coefficient field is a function field. -

Polynomials and Quadratics
Higher hsn .uk.net Mathematics UNIT 2 OUTCOME 1 Polynomials and Quadratics Contents Polynomials and Quadratics 64 1 Quadratics 64 2 The Discriminant 66 3 Completing the Square 67 4 Sketching Parabolas 70 5 Determining the Equation of a Parabola 72 6 Solving Quadratic Inequalities 74 7 Intersections of Lines and Parabolas 76 8 Polynomials 77 9 Synthetic Division 78 10 Finding Unknown Coefficients 82 11 Finding Intersections of Curves 84 12 Determining the Equation of a Curve 86 13 Approximating Roots 88 HSN22100 This document was produced specially for the HSN.uk.net website, and we require that any copies or derivative works attribute the work to Higher Still Notes. For more details about the copyright on these notes, please see http://creativecommons.org/licenses/by-nc-sa/2.5/scotland/ Higher Mathematics Unit 2 – Polynomials and Quadratics OUTCOME 1 Polynomials and Quadratics 1 Quadratics A quadratic has the form ax2 + bx + c where a, b, and c are any real numbers, provided a ≠ 0 . You should already be familiar with the following. The graph of a quadratic is called a parabola . There are two possible shapes: concave up (if a > 0 ) concave down (if a < 0 ) This has a minimum This has a maximum turning point turning point To find the roots (i.e. solutions) of the quadratic equation ax2 + bx + c = 0, we can use: factorisation; completing the square (see Section 3); −b ± b2 − 4 ac the quadratic formula: x = (this is not given in the exam). 2a EXAMPLES 1. Find the roots of x2 −2 x − 3 = 0 . -
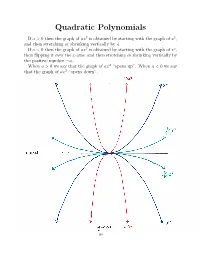
Quadratic Polynomials
Quadratic Polynomials If a>0thenthegraphofax2 is obtained by starting with the graph of x2, and then stretching or shrinking vertically by a. If a<0thenthegraphofax2 is obtained by starting with the graph of x2, then flipping it over the x-axis, and then stretching or shrinking vertically by the positive number a. When a>0wesaythatthegraphof− ax2 “opens up”. When a<0wesay that the graph of ax2 “opens down”. I Cit i-a x-ax~S ~12 *************‘s-aXiS —10.? 148 2 If a, c, d and a = 0, then the graph of a(x + c) 2 + d is obtained by If a, c, d R and a = 0, then the graph of a(x + c)2 + d is obtained by 2 R 6 2 shiftingIf a, c, the d ⇥ graphR and ofaax=⇤ 2 0,horizontally then the graph by c, and of a vertically(x + c) + byd dis. obtained (Remember by shiftingshifting the the⇥ graph graph of of axax⇤ 2 horizontallyhorizontally by by cc,, and and vertically vertically by by dd.. (Remember (Remember thatthatd>d>0meansmovingup,0meansmovingup,d<d<0meansmovingdown,0meansmovingdown,c>c>0meansmoving0meansmoving thatleft,andd>c<0meansmovingup,0meansmovingd<right0meansmovingdown,.) c>0meansmoving leftleft,and,andc<c<0meansmoving0meansmovingrightright.).) 2 If a =0,thegraphofafunctionf(x)=a(x + c) 2+ d is called a parabola. If a =0,thegraphofafunctionf(x)=a(x + c)2 + d is called a parabola. 6 2 TheIf a point=0,thegraphofafunction⇤ ( c, d) 2 is called thefvertex(x)=aof(x the+ c parabola.) + d is called a parabola. The point⇤ ( c, d) R2 is called the vertex of the parabola. -

The Determinant and the Discriminant
CHAPTER 2 The determinant and the discriminant In this chapter we discuss two indefinite quadratic forms: the determi- nant quadratic form det(a, b, c, d)=ad bc, − and the discriminant disc(a, b, c)=b2 4ac. − We will be interested in the integral representations of a given integer n by either of these, that is the set of solutions of the equations 4 ad bc = n, (a, b, c, d) Z − 2 and 2 3 b ac = n, (a, b, c) Z . − 2 For q either of these forms, we denote by Rq(n) the set of all such represen- tations. Consider the three basic questions of the previous chapter: (1) When is Rq(n) non-empty ? (2) If non-empty, how large Rq(n)is? (3) How is the set Rq(n) distributed as n varies ? In a suitable sense, a good portion of the answers to these question will be similar to the four and three square quadratic forms; but there will be major di↵erences coming from the fact that – det and disc are indefinite quadratic forms (have signature (2, 2) and (2, 1) over the reals), – det and disc admit isotropic vectors: there exist x Q4 (resp. Q3) such that det(x)=0(resp.disc(x) = 0). 2 1. Existence and number of representations by the determinant As the name suggest, determining Rdet(n) is equivalent to determining the integral 2 2 matrices of determinant n: ⇥ (n) ab Rdet(n) M (Z)= g = M2(Z), det(g)=n . ' 2 { cd 2 } ✓ ◆ n 0 Observe that the diagonal matrix a = has determinant n, and any 01 ✓ ◆ other matrix in the orbit SL2(Z).a is integral and has the same determinant. -

Singularities of Hyperdeterminants Annales De L’Institut Fourier, Tome 46, No 3 (1996), P
ANNALES DE L’INSTITUT FOURIER JERZY WEYMAN ANDREI ZELEVINSKY Singularities of hyperdeterminants Annales de l’institut Fourier, tome 46, no 3 (1996), p. 591-644 <http://www.numdam.org/item?id=AIF_1996__46_3_591_0> © Annales de l’institut Fourier, 1996, tous droits réservés. L’accès aux archives de la revue « Annales de l’institut Fourier » (http://annalif.ujf-grenoble.fr/) implique l’accord avec les conditions gé- nérales d’utilisation (http://www.numdam.org/conditions). Toute utilisa- tion commerciale ou impression systématique est constitutive d’une in- fraction pénale. Toute copie ou impression de ce fichier doit conte- nir la présente mention de copyright. Article numérisé dans le cadre du programme Numérisation de documents anciens mathématiques http://www.numdam.org/ Ann. Inst. Fourier, Grenoble 46, 3 (1996), 591-644 SINGULARITIES OF HYPERDETERMINANTS by J. WEYMAN (1) and A. ZELEVINSKY (2) Contents. 0. Introduction 1. Symmetric matrices with diagonal lacunae 2. Cusp type singularities 3. Eliminating special node components 4. The generic node component 5. Exceptional cases: the zoo of three- and four-dimensional matrices 6. Decomposition of the singular locus into cusp and node parts 7. Multi-dimensional "diagonal" matrices and the Vandermonde matrix 0. Introduction. In this paper we continue the study of hyperdeterminants recently undertaken in [4], [5], [12]. The hyperdeterminants are analogs of deter- minants for multi-dimensional "matrices". Their study was initiated by (1) Partially supported by the NSF (DMS-9102432). (2) Partially supported by the NSF (DMS- 930424 7). Key words: Hyperdeterminant - Singular locus - Cusp type singularities - Node type singularities - Projectively dual variety - Segre embedding. Math. classification: 14B05. -

Nature of the Discriminant
Name: ___________________________ Date: ___________ Class Period: _____ Nature of the Discriminant Quadratic − b b 2 − 4ac x = b2 − 4ac Discriminant Formula 2a The discriminant predicts the “nature of the roots of a quadratic equation given that a, b, and c are rational numbers. It tells you the number of real roots/x-intercepts associated with a quadratic function. Value of the Example showing nature of roots of Graph indicating x-intercepts Discriminant b2 – 4ac ax2 + bx + c = 0 for y = ax2 + bx + c POSITIVE Not a perfect x2 – 2x – 7 = 0 2 b – 4ac > 0 square − (−2) (−2)2 − 4(1)(−7) x = 2(1) 2 32 2 4 2 x = = = 1 2 2 2 2 Discriminant: 32 There are two real roots. These roots are irrational. There are two x-intercepts. Perfect square x2 + 6x + 5 = 0 − 6 62 − 4(1)(5) x = 2(1) − 6 16 − 6 4 x = = = −1,−5 2 2 Discriminant: 16 There are two real roots. These roots are rational. There are two x-intercepts. ZERO b2 – 4ac = 0 x2 – 2x + 1 = 0 − (−2) (−2)2 − 4(1)(1) x = 2(1) 2 0 2 x = = = 1 2 2 Discriminant: 0 There is one real root (with a multiplicity of 2). This root is rational. There is one x-intercept. NEGATIVE b2 – 4ac < 0 x2 – 3x + 10 = 0 − (−3) (−3)2 − 4(1)(10) x = 2(1) 3 − 31 3 31 x = = i 2 2 2 Discriminant: -31 There are two complex/imaginary roots. There are no x-intercepts. Quadratic Formula and Discriminant Practice 1. -
![Arxiv:1404.6852V1 [Quant-Ph] 28 Apr 2014 Asnmes 36.A 22.J 03.65.-W 02.20.Hj, 03.67.-A, Numbers: PACS Given](https://docslib.b-cdn.net/cover/8298/arxiv-1404-6852v1-quant-ph-28-apr-2014-asnmes-36-a-22-j-03-65-w-02-20-hj-03-67-a-numbers-pacs-given-1198298.webp)
Arxiv:1404.6852V1 [Quant-Ph] 28 Apr 2014 Asnmes 36.A 22.J 03.65.-W 02.20.Hj, 03.67.-A, Numbers: PACS Given
SLOCC Invariants for Multipartite Mixed States Naihuan Jing1,5,∗ Ming Li2,3, Xianqing Li-Jost2, Tinggui Zhang2, and Shao-Ming Fei2,4 1School of Sciences, South China University of Technology, Guangzhou 510640, China 2Max-Planck-Institute for Mathematics in the Sciences, 04103 Leipzig, Germany 3Department of Mathematics, China University of Petroleum , Qingdao 266555, China 4School of Mathematical Sciences, Capital Normal University, Beijing 100048, China 5Department of Mathematics, North Carolina State University, Raleigh, NC 27695, USA Abstract We construct a nontrivial set of invariants for any multipartite mixed states under the SLOCC symmetry. These invariants are given by hyperdeterminants and independent from basis change. In particular, a family of d2 invariants for arbitrary d-dimensional even partite mixed states are explicitly given. PACS numbers: 03.67.-a, 02.20.Hj, 03.65.-w arXiv:1404.6852v1 [quant-ph] 28 Apr 2014 ∗Electronic address: [email protected] 1 I. INTRODUCTION Classification of multipartite states under stochastic local operations and classical commu- nication (SLOCC) has been a central problem in quantum communication and computation. Recently advances have been made for the classification of pure multipartite states under SLOCC [1, 2] and the dimension of the space of homogeneous SLOCC-invariants in a fixed degree is given as a function of the number of qudits. In this work we present a general method to construct polynomial invariants for mixed states under SLOCC. In particular we also derive general invariants under local unitary (LU) symmetry for mixed states. Polynomial invariants have been investigated in [3–6], which allow in principle to deter- mine all the invariants of local unitary transformations. -

Etienne Bézout on Elimination Theory Erwan Penchevre
Etienne Bézout on elimination theory Erwan Penchevre To cite this version: Erwan Penchevre. Etienne Bézout on elimination theory. 2017. hal-01654205 HAL Id: hal-01654205 https://hal.archives-ouvertes.fr/hal-01654205 Preprint submitted on 3 Dec 2017 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Etienne Bézout on elimination theory ∗ Erwan Penchèvre Bézout’s name is attached to his famous theorem. Bézout’s Theorem states that the degree of the eliminand of a system a n algebraic equations in n unknowns, when each of the equations is generic of its degree, is the product of the degrees of the equations. The eliminand is, in the terms of XIXth century algebra1, an equation of smallest degree resulting from the elimination of (n − 1) unknowns. Bézout demonstrates his theorem in 1779 in a treatise entitled Théorie générale des équations algébriques. In this text, he does not only demonstrate the theorem for n > 2 for generic equations, but he also builds a classification of equations that allows a better bound on the degree of the eliminand when the equations are not generic. This part of his work is difficult: it appears incomplete and has been seldom studied.