The Integration of IEEE 802.11 (WLAN) with RFID Systems in ISM (2.45 Ghz) Frequency Band Environment Using Framed Slotted ALOHA and IEEE 802.15.4
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
2.4/5 Ghz Dual-Band 1X1 Wi-Fi 5 (802.11Ac) and Bluetooth 5.2 Solution Rev
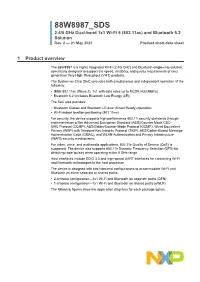
88W8987_SDS 2.4/5 GHz Dual-band 1x1 Wi-Fi 5 (802.11ac) and Bluetooth 5.2 Solution Rev. 2 — 21 May 2021 Product short data sheet 1 Product overview The 88W8987 is a highly integrated Wi-Fi (2.4/5 GHz) and Bluetooth single-chip solution, specifically designed to support the speed, reliability, and quality requirements of next generation Very High Throughput (VHT) products. The System-on-Chip (SoC) provides both simultaneous and independent operation of the following: • IEEE 802.11ac (Wave 2), 1x1 with data rates up to MCS9 (433 Mbit/s) • Bluetooth 5.2 (includes Bluetooth Low Energy (LE)) The SoC also provides: • Bluetooth Classic and Bluetooth LE dual (Smart Ready) operation • Wi-Fi indoor location positioning (802.11mc) For security, the device supports high performance 802.11i security standards through implementation of the Advanced Encryption Standard (AES)/Counter Mode CBC- MAC Protocol (CCMP), AES/Galois/Counter Mode Protocol (GCMP), Wired Equivalent Privacy (WEP) with Temporal Key Integrity Protocol (TKIP), AES/Cipher-Based Message Authentication Code (CMAC), and WLAN Authentication and Privacy Infrastructure (WAPI) security mechanisms. For video, voice, and multimedia applications, 802.11e Quality of Service (QoS) is supported. The device also supports 802.11h Dynamic Frequency Selection (DFS) for detecting radar pulses when operating in the 5 GHz range. Host interfaces include SDIO 3.0 and high-speed UART interfaces for connecting Wi-Fi and Bluetooth technologies to the host processor. The device is designed with two front-end configurations to accommodate Wi-Fi and Bluetooth on either separate or shared paths: • 2-antenna configuration—1x1 Wi-Fi and Bluetooth on separate paths (QFN) • 1-antenna configuration—1x1 Wi-Fi and Bluetooth on shared paths (eWLP) The following figures show the application diagrams for each package option. -
802.11 Arbitration
802.11 Arbitration White Paper September 2009 Version 1.00 Author: Marcus Burton, CWNE #78 CWNP, Inc. [email protected] Technical Reviewer: GT Hill, CWNE #21 [email protected] Copyright 2009 CWNP, Inc. www.cwnp.com Page 1 Table of Contents TABLE OF CONTENTS ............................................................................................................................... 2 EXECUTIVE SUMMARY ............................................................................................................................. 3 Approach / Intent ................................................................................................................................... 3 INTRODUCTION TO 802.11 CHANNEL ACCESS ................................................................................... 4 802.11 MAC CHANNEL ACCESS ARCHITECTURE ............................................................................... 5 Distributed Coordination Function (DCF) ............................................................................................. 5 Point Coordination Function (PCF) ...................................................................................................... 6 Hybrid Coordination Function (HCF) .................................................................................................... 6 Summary ................................................................................................................................................ 7 802.11 CHANNEL ACCESS MECHANISMS ........................................................................................... -

Introducing a Micro-Wireless Architecture for Business Activity Sensing,” Proc
Pre-print Manuscript of Article: Bridgelall, R., “Introducing a Micro-wireless Architecture for Business Activity Sensing,” Proc. IEEE International Conference on RFID, Las Vegas, NV, pp. 156-164, April 16 – 17, 2008. Introducing a Micro-wireless Architecture for Business Activity Sensing Raj Bridgelall, Senior Member, IEEE Abstract—RFID performance deficiencies discovered in architectures in a manner that enables existing application recent high profile applications have highlighted the danger of requirements to be more readily addressed. This new selecting only passive tags for an application because of their architecture also enables applications that were not lowest cost relative to other types of RFID tags. previously possible. Consequentially, battery-based RFID technologies are being considered to fill those performance gaps. A mix of both A. Passive RFID passive and battery-based RFID technologies can provide a more cost effective and robust solution than a homogeneous Passive RFID systems have improved substantially since the RFID deployment. However, it is easy to choose the wrong introduction of first generation of ultra high frequency battery-based RFID technology given the confusing array of (UHF) systems. Improvements in range and interoperability, choices currently available. This paper explores the multi-tag arbitration speed, and interference susceptibility performance deficiencies of both passive and battery-based were promised and delivered with the ratification of EPC RFID technologies. A new micro-wireless technology that Class I Generation 2 (C1G2) and the ISO 18000-6 resolves these performance deficiencies is then introduced. Finally an application example is presented that demonstrates standards [1]. Although passive UHF RFID performance how the new technology can also seamlessly roam between enhancements, cost reduction, and end-user mandates helped passive and battery-based RFID infrastructures at the lowest to improve the technology adoption rate, the level of possible cost to bridge their respective performance gaps. -
Module 4: Table of Contents
Data Communications(15CS46) 4th Sem CSE & ISE MODULE 4: TABLE OF CONTENTS INTRODUCTION RANDOM ACCESS PROTOCOL ALOHA Pure ALOHA Vulnerable time Throughput Slotted ALOHA Throughput CSMA Vulnerable Time Persistence Methods CSMA/CD Minimum Frame-size Procedure Energy Level Throughput CSMA/CA Frame Exchange Time Line Network Allocation Vector Collision During Handshaking Hidden-Station Problem CSMA/CA and Wireless Networks CONTROLLED ACCESS PROTOCOL Reservation Polling Token Passing Logical Ring CHANNELIZATION FDMA TDMA CDMA Implementation Chips Data Representation Encoding and Decoding Sequence Generation ETHERNET PROTOCOL IEEE Project 802 Ethernet Evolution STANDARD ETHERNET Characteristics Connectionless and Unreliable Service Frame Format Frame Length Addressing Access Method Efficiency of Standard Ethernet Implementation Encoding and Decoding Changes in the Standard Bridged Ethernet Dept. of ISE,CITECH 1 Data Communications(15CS46) 4th Sem CSE & ISE Switched Ethernet Full-Duplex Ethernet FAST ETHERNET (100 MBPS) Access Method Physical Layer Topology Implementation Encoding GIGABIT ETHERNET MAC Sublayer Physical Layer Topology Implementation Encoding TEN GIGABIT ETHERNET Implementation INTRODUCTION OF WIRELESS-LANS Architectural Comparison Characteristics Access Control IEEE 802.11 PROJECT Architecture BSS ESS Station Types MAC Sublayer DCF Network Allocation Vector Collision During Handshaking PCF Fragmentation Frame Types Frame Format Addressing Mechanism Exposed Station Problem Physical Layer IEEE 802.11 FHSS IEEE 802.11 DSSS IEEE 802.11 Infrared IEEE 802.11a OFDM IEEE 802.11b DSSS IEEE 802.11g BLUETOOTH Architecture Piconets Scatternet Bluetooth Devices Bluetooth Layers Radio Layer Baseband Layer TDMA Links Frame Types Frame Format L2CAP Dept. of ISE,CITECH 2 Data Communications(15CS46) 4th Sem CSE & ISE MODULE 4: MULTIPLE ACCESS 4.1 Introduction When nodes use shared-medium, we need multiple-access protocol to coordinate access to medium. -

3. WIRELESS NETWORKS/WI-FI What Is a Wireless Network?
1 Technological FOUNDATIONS FOR CONVERGENCE(3) 1. Digitization/Digital Storage 2. Networking/Broadband 3. WIRELESS/WI-FI 4. SPECTRUM MANAGEMENT 3. WIRELESS NETWORKS/WI-FI What Is a Wireless Network?: The Basics http://www.cisco.com/cisco/web/solutions/small_business/resource_center/articles/w ork_from_anywhere/what_is_a_wireless_network/index.html Five Qustions to Start With What is a wireless network? How is it different from a wired network? And what are the business benefits of a wireless network? The following overview answers basic questions such as What is a wireless network?, so you can decide if one is right for your business. What Is a Wireless Network? A wireless local-area network (LAN) uses radio waves to connect devices such as laptops to the Internet and to your business network and its applications. When you connect a laptop to a WiFi hotspot at a cafe, hotel, airport lounge, or other public place, you're connecting to that business's wireless network. What Is a Wireless Network vs. a Wired Network? A wired network connects devices to the Internet or other network using cables. The most common wired networks use cables connected to Ethernet ports on the network router on one end and to a computer or other device on the cable's opposite end. What Is a Wireless Network? Catching Up with Wired Networks In the past, some believed wired networks were faster and more secure than wireless networks. But continual enhancements to wireless networking standards and technologies have eroded those speed and security differences. What Is a Wireless Network?: The Benefits Small businesses can experience many benefits from a wireless network, including: • Convenience. -
Technical Report No
ENGINEERING FACULTY,UNIVERSITY OF PORTO Technical Report no: 1 Robson Costa Supervisor: Paulo Portugal (Ph.D.) Co-supervisor: Francisco Vasques (Ph.D.) Co-supervisor: Ricardo Moraes (Ph.D.) 2010, September c Robson Costa, 2010 Contents List of Figures ii List of Tables iii List of Abbreviations iv 1 Introduction1 1.1 Benefits . .2 1.2 Challenges . .2 2 IEEE 802.11 Standard4 2.1 IEEE 802.11 Medium Access Mechanisms . .5 2.1.1 DCF - Distributed Coordination Function . .6 2.1.2 PCF - Point Coordination Function . .7 2.1.3 EDCA - Enhanced Distributed Channel Access . .9 2.1.4 HCCA - HCF Controlled Channel Access . 11 3 IEEE 802.11n Amendment 14 3.1 PHY Enhancements . 15 3.1.1 MIMO - Multiple-Input Multiple-Output ................. 15 3.1.2 Channel-bonding . 17 3.2 MAC Enhancements . 18 3.2.1 Frame aggregation . 19 3.2.2 Block ACK . 21 3.2.3 Reverse Direction Protocol . 22 4 Review of Relevant Work 23 4.1 Real-Time communication in IEEE 802.11 . 23 4.1.1 CA - Collision Avoidance . 23 4.1.2 CS - Collision Solver . 26 4.1.3 CR - Collision Reducer . 27 4.2 Comparison of the solutions presented . 30 5 Conclusion 31 References 37 i List of Figures 2.1 Original IEEE 802.11 MAC architecture [1]....................5 2.2 IEEE 802.11e MAC architecture [2].........................5 2.3 Interframe spaces in the DCF and PCF mechanisms [1]. .6 2.4 DCF service [2]....................................6 2.5 PCF service [2]....................................8 2.6 CFP foreshortening [2]................................9 2.7 Interframe spaces in the EDCA mechanism [2]. -
802.11N-Draftstd June2009.Pdf
IEEE P802.11n/D11.0, June 2009 1 2 IEEE P802.11n™/D11.0 3 4 5 6 7 Draft STANDARD for 8 9 10 Information Technology— 11 12 13 Telecommunications and information exchange 14 15 between systems— 16 17 18 Local and metropolitan area networks— 19 20 Specific requirements 21 22 23 24 25 26 Part 11: Wireless LAN Medium Access Control 27 28 (MAC) and Physical Layer (PHY) specifications 29 30 31 32 33 Amendment 5: Enhancements for Higher 34 35 36 Throughput 37 38 39 40 41 Prepared by the 802.11 Working Group of the 802 Committee 42 43 Copyright © 2009 by the IEEE. 44 Three Park Avenue 45 46 New York, NY 10016-5997, USA 47 48 All rights reserved. 49 50 51 This document is an unapproved draft of a proposed IEEE Standard. As such, this document is subject to 52 change. USE AT YOUR OWN RISK! Because this is an unapproved draft, this document must not be uti- 53 lized for any conformance/compliance purposes. Permission is hereby granted for IEEE Standards Commit- 54 55 tee participants to reproduce this document for purposes of international standardization consideration. Prior 56 to adoption of this document, in whole or in part, by another standards development organization, permis- 57 sion must first be obtained from the IEEE Standards Activities Department ([email protected]). Other enti- 58 ties seeking permission to reproduce this document, in whole or in part, must also obtain permission from 59 the IEEE Standards Activities Department. 60 61 IEEE Standards Activities Department 62 63 445 Hoes Lane 64 65 Piscataway, NJ 08854, USA Copyright © 2009 IEEE. -
Wireless Network Communications Overview for Space Mission Operations
CCSDS Historical Document This document’s Historical status indicates that it is no longer current. It has either been replaced by a newer issue or withdrawn because it was deemed obsolete. Current CCSDS publications are maintained at the following location: http://public.ccsds.org/publications/ CCSDS HISTORICAL DOCUMENT Report Concerning Space Data System Standards WIRELESS NETWORK COMMUNICATIONS OVERVIEW FOR SPACE MISSION OPERATIONS INFORMATIONAL REPORT CCSDS 880.0-G-1 GREEN BOOK December 2010 CCSDS HISTORICAL DOCUMENT Report Concerning Space Data System Standards WIRELESS NETWORK COMMUNICATIONS OVERVIEW FOR SPACE MISSION OPERATIONS INFORMATIONAL REPORT CCSDS 880.0-G-1 GREEN BOOK December 2010 CCSDS HISTORICAL DOCUMENT CCSDS REPORT CONCERNING INTEROPERABLE WIRELESS NETWORK COMMUNICATIONS AUTHORITY Issue: Informational Report, Issue 1 Date: December 2010 Location: Washington, DC, USA This document has been approved for publication by the Management Council of the Consultative Committee for Space Data Systems (CCSDS) and reflects the consensus of technical panel experts from CCSDS Member Agencies. The procedure for review and authorization of CCSDS Reports is detailed in the Procedures Manual for the Consultative Committee for Space Data Systems. This document is published and maintained by: CCSDS Secretariat Space Communications and Navigation Office, 7L70 Space Operations Mission Directorate NASA Headquarters Washington, DC 20546-0001, USA CCSDS 880.0-G-1 Page i December 2010 CCSDS HISTORICAL DOCUMENT CCSDS REPORT CONCERNING INTEROPERABLE WIRELESS NETWORK COMMUNICATIONS FOREWORD This document is a CCSDS Informational Report, which contains background and explanatory material to support the CCSDS wireless network communications Best Practices for networked wireless communications in support of space missions. Through the process of normal evolution, it is expected that expansion, deletion, or modification of this document may occur. -

C Copyright 2015 Farzad Hessar
c Copyright 2015 Farzad Hessar Spectrum Sharing in White Spaces Farzad Hessar A dissertation submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy University of Washington 2015 Reading Committee: Sumit Roy, Chair John D. Sahr Archis Vijay Ghate Program Authorized to Offer Degree: Electrical Engineering University of Washington Abstract Spectrum Sharing in White Spaces Farzad Hessar Chair of the Supervisory Committee: Professor Sumit Roy Electrical Engineering Demand for wireless Internet traffic has been increasing exponentially over the last decade, due to widespread usage of smart-phones along with new multimedia applications. The need for higher wireless network throughput has been pushing engineers to expand network capacities in order to keep pace with growing user demands. The improvement has been multi-dimensional, including optimizations in MAC/Physical layer for boosting spectral efficiency, expanding network infrastructure with reduced cell sizes, and utilizing additional RF spectrum. Nevertheless, traffic demand has been increasing at a much faster pace than network throughput and our current networks will not be able to handle customer needs in near future. While assigning additional spectrum for cellular communication has been a major ele- ment of network capacity increase, the natural scarcity of RF spectrum limits the extend of this solution. On the other hand, researchers have shown that licensed spectrum that is owned and held by a primary user is heavily underutilized. Examples are TV channels in the VHF/UHF band as well as radar spectrum in the SHF band. Hence, a more efficient use of this spectrum is to permit unlicensed users to coexist with the primary owner, i.e. -

2.4 Ghz/5 Ghz Dual-Band 1X1 Wi-Fi 4 and Bluetooth 5.2 Combo Soc Rev
88W8977_SDS 2.4 GHz/5 GHz Dual-band 1x1 Wi-Fi 4 and Bluetooth 5.2 Combo SoC Rev. 3 — 13 May 2021 Product short data sheet 1 Product overview The 88W8977 System-on-Chip (SoC) is a highly integrated single-chip solution that incorporates both Wi-Fi® (2.4/5 GHz) and Bluetooth® technology. The System-on-Chip (SoC) provides both simultaneous and independent operation of the following: • IEEE 802.11n compliant, 1x1 spatial stream with data rates up to MCS7 (150 Mbps) • Bluetooth 5.2 (includes Bluetooth Low Energy (LE)) The SoC also provides 3-way coexistence for Wi-Fi, Bluetooth, and ZigBee operation, and indoor location and navigation (802.11mc). The internal coexistence arbitration and a Mobile Wireless Systems (MWS) serial transport interface provide the functionality for connecting an external Long Term Evolution (LTE) or ZigBee device. The device also supports a coexistence interface for co-located Bluetooth/Wi-Fi device arbitration. For security, the device supports high performance 802.11i security standards through the implementation of the Advanced Encryption Standard (AES)/Counter Mode CBC- MAC Protocol (CCMP), Wired Equivalent Privacy (WEP) with Temporal Key Integrity Protocol (TKIP), AES/Cipher-Based Message Authentication Code (CMAC), WPA (AES), and Wi-Fi Authentication and Privacy Infrastructure (WAPI) security mechanisms. For video, voice, and multimedia applications, 802.11e Quality of Service (QoS) is supported. The device also features 802.11h Dynamic Frequency Selection (DFS) for detecting radar pulses when operating in the 5 GHz range. Host interfaces include SDIO 3.0 and high-speed UART interfaces for connecting Wi-Fi and Bluetooth technologies to the host processor. -

Wireless Networks and MAC Protocols
Wireless Networks and MAC Protocols Embedded Networks 11 1 J. Kaiser, IVS-EOS Some Wireless Technologies Embedded Networks 11 2 J. Kaiser, IVS-EOS Wireless Technology Comparison Chart Standard Fre- Bandwidth Tx-Power Range Goal Application quency (EIRP) 802.11 2,4 GHz <= 600 MBit/s 100 mW 250 m High Data Internet Wlan 5 GHz Rate Sharing, Media Streaming, File Transfer 802.15.1 2,4 GHz <= 2,1 MBit/s 100 mW 100 m Low Power, Handsfree, Bluetooth 2,5 mW 10 m Ease of Use, Cable 1mW 5m Security Replacement 802.15.4 0,8 GHz <= 20 kBit/s 1 mW 10 m Ultra-Low- Sensor Zigbee 0,9 GHz <= 40 kBit/s Power, networks, 2,4 GHz <= 250 kBit/s Timing Remote Guarentees control Embedded Networks 11 3 J. Kaiser, IVS-EOS IEEE 802.11 IEEE 802.11 MAC Layer MAC Architektur: Contention- Free Contention Services Services Point Coordination Function (PCF) (optional) Distributed Coordination Function (DCF) Embedded Networks 11 4 J. Kaiser, IVS-EOS IEEE 802.11 Distributed Coordination Function (DCF) • CSMA/CA Protocol • Collision Avoidance by random backoff procedure (p-persistent) • All Frames are acknowledged, lost Frames are resend • Priority Access by Interframe Space (IFS) => fair arbitration but no real-time support Embedded Networks 11 5 J. Kaiser, IVS-EOS Relationship of different IFSs in 802.11 DIFS DIFS Contention Window PIFS SIFS Busy Medium Backoff-Window Next frame Slot time Defer Access DIFS: DCF Interframe Space PIFS: PCF Interframe Space SIFS: Short Interframe Space Embedded Networks 11 6 J. Kaiser, IVS-EOS IEEE 802.11 Network STA Types ad-hoc network CELL STA STA infrastructure network STA STA CELL CELL DS: Distribution System STA IEEE 802.X AP STA AP Access Point Embedded Networks 11 7 J. -
Partner Directory Wind River Partner Program
PARTNER DIRECTORY WIND RIVER PARTNER PROGRAM The Internet of Things (IoT), cloud computing, and Network Functions Virtualization are but some of the market forces at play today. These forces impact Wind River® customers in markets ranging from aerospace and defense to consumer, networking to automotive, and industrial to medical. The Wind River® edge-to-cloud portfolio of products is ideally suited to address the emerging needs of IoT, from the secure and managed intelligent devices at the edge to the gateway, into the critical network infrastructure, and up into the cloud. Wind River offers cross-architecture support. We are proud to partner with leading companies across various industries to help our mutual customers ease integration challenges; shorten development times; and provide greater functionality to their devices, systems, and networks for building IoT. With more than 200 members and still growing, Wind River has one of the embedded software industry’s largest ecosystems to complement its comprehensive portfolio. Please use this guide as a resource to identify companies that can help with your development across markets. For updates, browse our online Partner Directory. 2 | Partner Program Guide MARKET FOCUS For an alphabetical listing of all members of the *Clavister ..................................................37 Wind River Partner Program, please see the Cloudera ...................................................37 Partner Index on page 139. *Dell ..........................................................45 *EnterpriseWeb