RADAR: Supplement #1 BEAM WIDTH COMPUTATIONS
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Microwave Communications and Radar
2/26 6.014 Lecture 14: Microwave Communications and Radar A. Overview Microwave communications and radar systems have similar architectures. They typically process the signals before and after they are transmitted through space, as suggested in Figure L14-1. Conversion of the signals to electromagnetic waves occurs at the output of a power amplifier, and conversion back to signals occurs at the detector, after reception. Guiding-wave structures connect to the transmitting or receiving antenna, which are generally one and the same in monostatic radar systems. We have discussed antennas and multipath propagation earlier, so the principal novel mechanisms we need to understand now are the coupling of these electromagnetic signals between antennas and circuits, and the intervening propagating structures. Issues we must yet address include transmission lines and waveguides, impedance transformations, matching, and resonance. These same issues also arise in many related systems, such as lidar systems that are like radar but use light beams instead, passive sensing systems that receive signals emitted by the environment either naturally (like thermal radiation) or by artifacts (like motors or computers), and data recording systems like DVD’s or magnetic disks. The performance of many systems of interest is often limited in part by our ability to couple energy efficiently from one port to another, and our ability to filter out deleterious signals. Understanding these issues is therefore an important part of such design effors. The same issues often occur in any system utilizing high-frequency signals, whether or not they are transmitted externally. B. Radar, Lidar, and Passive Systems Figure L14-2 illustrates a standard radar or lidar configuration where the transmitted power Pt is focused toward a target using an antenna with gain Gt. -
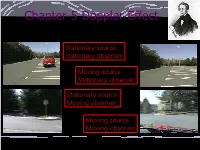
Chapter-5 Doppler Effect
Chapter-5 Doppler Effect Stationary source Stationary observer Moving source Stationary observer Stationary source Moving observer Moving source Moving observer http://www.astro.ubc.ca/~scharein/a311/Sim/doppler/Doppler.html Doppler Effect The Doppler effect is the apparent change in the frequency of a wave motion when there is relative motion between the source of the waves and the observer. The apparent change in frequency f experienced as a result of the Doppler effect is known as the Doppler shift. The value of the Doppler shift increases as the relative velocity v between the source and the observer increases. The Doppler effect applies to all forms of waves. Doppler Effect (Moving Source) http://www.absorblearning.com/advancedphysics/demo/units/040103.html Suppose the source moves at a steady velocity vs towards a stationary observer. The source emits sound wave with frequency f. From the diagram, we can see that the distance between crests is shortened such that ' vs Since = c/f and = 1/f, We get c c v s f ' f f c vs f ' ( ) f c vs Doppler Effect (Moving Observer) Consider an observer moving with velocity vo toward a stationary source S. The source emits a sound wave with frequency f and wavelength = c/f. The velocity of the sound wave relative to the observer is c + vo. c Doppler Shift Consider a source moving towards an observer, the Doppler shift f is c f f ' f ( ) f f c vs f v s f c v s f v If v <<c, then we get s s f c The above equation also applies to a receding source, with vs taking as negative. -

Radar, Without Tears
Radar, without tears François Le Chevalier1 May 2017 Originally invented to facilitate maritime navigation and avoid icebergs, at the beginning of the last century, radar took off during the Second World War, especially for aerial surveillance and guidance from the ground or from aircraft. Since then, it has continued to expand its field of employment. 1 What is it, what is it for? Radar is used in the military field for surveillance, guidance and combat, and in the civilian area for navigation, obstacle avoidance, security, meteorology, and remote sensing. For some missions, it is irreplaceable: detecting flying objects or satellites, several hundred kilometers away, monitoring vehicles and convoys more than 100 kilometers round, making a complete picture of a planet through its atmosphere, measuring precipitations, marine currents and winds at long ranges, detecting buried objects or observing through walls – as many functions that no other sensor can provide, and whose utility is not questionable. Without radar, an aerial or terrestrial attack could remain hidden until the last minute, and the rain would come without warning to Roland–Garros and Wimbledon ... Curiously, to do this, the radar uses a physical phenomenon that nature hardly uses: radio waves, which are electromagnetic waves using frequencies between 1 MHz and 100 GHz – most radars operating with wavelength ( = c / f, being the wavelength, c the speed of light, 3.108 m/s, and f the frequency) between 300 m and 3 mm (actually, for most of them, between 1m and 1cm): wavelengths on a human scale ... Indeed, while the optical domain of electromagnetic waves, or even the ultraviolet and infrared domains, are widely used by animals, while the acoustic waves are also widely used by marine or terrestrial animals, there is practically no example of animal use of this vast part, known as "radioelectric", of the electromagnetic spectrum (some fish, Eigenmannia, are an exception to this rule, but they use frequencies on the order of 300 Hz, and therefore very much lower than the "radar" frequencies). -

The Montague Doppler Radar, an Overview June 2018
ISSUE PAPER SERIES The Montague Doppler Radar, An Overview June 2018 NEW YORK STATE TUG HILL COMMISSION DULLES STATE OFFICE BUILDING · 317 WASHINGTON STREET · WATERTOWN, NY 13601 · (315) 785-2380 · WWW.TUGHILL.ORG The Tug Hill Commission Technical and Issue Paper Series are designed to help local officials and citizens in the Tug Hill region and other rural parts of New York State. The Tech- nical Paper Series provides guidance on procedures based on questions frequently received by the Commis- sion. The Issue Paper Series pro- vides background on key issues facing the region without taking advocacy positions. Other papers in each se- ries are available from the Tug Hill Commission. Please call us or vis- it our website for more information. The Montague Doppler Weather Radar, An Overview Table of Contents Introduction .................................................................................................................................................. 1 Who owns the Montague radar? ................................................................................................................. 1 Who uses the Montague radar? .................................................................................................................. 1 How does the radar system work? .............................................................................................................. 2 How does the radar predict lake-effect snowstorms? ................................................................................ 2 How does the -

Band Radar Models FR-2115-B/2125-B/2155-B*/2135S-B
R BlackBox type (with custom monitor) X/S – band Radar Models FR-2115-B/2125-B/2155-B*/2135S-B I 12, 25 and 50* kW T/R up X-band, 30 kW I Dual-radar/full function remote S-band inter-switching I SXGA PC monitor either CRT or color I New powerful processor with LCD high-speed, high-density gate array and I Optional ARP-26 Automatic Radar sophisticated software Plotting Aid (ARPA) on 40 targets I New cast aluminum scanner gearbox I Furuno's exclusive chart/radar overlay and new series of streamlined radiators technique by optional RP-26 VideoPlotter I Shared monitor utilization of Radar and I Easy to create radar maps PC systems with custom PC monitor switching system The BlackBox radar system FR-2115-B, FR-2125-B, FR-2155-B* and FR-2135S-B are custom configured by adding a user’s favorite display to the blackbox radar package. The package is based on a Furuno standard radar used in the FR-21x5-B series with (FURUNO) monitor which is designed to comply with IMO Res MSC.64(67) Annex 4 for shipborne radar and A.823 (19) for ARPA performance. The display unit may be selected from virtually any size of multi-sync PC monitor, either a CRT screen or flat panel LCD display. The blackbox radar system is suitable for various ships which require no specific type approval as a SOLAS compliant radar. The radar is available in a variety of configurations: 12, 25, 30 and 50* kW output, short or long antenna radiator, 24 or 42 rpm scanner, with standard Electronic Plotting Aid (EPA) and optional Automatic Radar Plotting Aid (ARPA). -

An Implementation of Real-Time Phased Array Radar Fundamental Functions on a DSP-Focused, High-Performance, Embedded Computing Platform
aerospace Article An Implementation of Real-Time Phased Array Radar Fundamental Functions on a DSP-Focused, High-Performance, Embedded Computing Platform Xining Yu 1,*, Yan Zhang 1, Ankit Patel 1, Allen Zahrai 2 and Mark Weber 2 1 School of Electrical and Computer Engineering, University of Oklahoma, 3190 Monitor Avenue, Norman, OK 73019, USA; [email protected] (Y.Z.); [email protected] (A.P.) 2 National Severe Storms Laboratory, National Oceanic and Atomospheric Administration, Norman, OK 73072, USA; [email protected] (A.Z.); [email protected] (M.W.) * Correspondence: [email protected]; Tel.: +1-405-325-2871 Academic Editor: Konstantinos Kontis Received: 22 July 2016; Accepted: 2 September 2016; Published: 9 September 2016 Abstract: This paper investigates the feasibility of a backend design for real-time, multiple-channel processing digital phased array system, particularly for high-performance embedded computing platforms constructed of general purpose digital signal processors. First, we obtained the lab-scale backend performance benchmark from simulating beamforming, pulse compression, and Doppler filtering based on a Micro Telecom Computing Architecture (MTCA) chassis using the Serial RapidIO protocol in backplane communication. Next, a field-scale demonstrator of a multifunctional phased array radar is emulated by using the similar configuration. Interestingly, the performance of a barebones design is compared to that of emerging tools that systematically take advantage of parallelism and multicore capabilities, including the Open Computing Language. Keywords: phased array radar; embedded computing; serial RapidIO; MPAR 1. Introduction 1.1. Real-Time, Large-Scale, Phased Array Radar Systems In [1], we had introduced the real-time phased array radar (PAR) processing based on the Micro Telecom Computing Architecture (MTCA) chassis. -
Spring 2017 Some Reflections on the History of Radar from Its Invention
newsletter OF THE James Clerk Maxwell Foundation ISSN 205 8-7503 (Print) Issue No.8 Spring 2017 ISSN 205 8-7511 (Online) Some Re flections on the History of Radar from its Invention up to the Second World War By Professor Hugh Griffiths , DSc(Eng), FIET, FIEEE, FREng, University College, London, Royal Academy of Engineering Chair of Radio Frequency Sensors Electromagnetic Waves – Maxwell and Hertz In 1927, in France, Pierre David had observed similar effects and, in 1930, had conducted further trials, leading to a deployed In his famous 1865 paper ‘ A Dynamical Theory of the Electromagnetic forward-scatter radar system to protect the naval ports of Brest, Field’ Maxwell derived theoretically his famous equations of Cherbourg, Toulon and Bizerte (Algeria). electromagnetism which showed that these equations implied that electromagnetic disturbances travelled as waves at finite speed. In 1935, in the UK, Robert Watson-Watt had a claim to be From the fact that the speed of these waves was equal (to within ‘the father of radar’ on the basis of the Daventry Experiment experimental error) to the known velocity of light, Maxwell (described later in this article) and his development of a radar detection system (Chain Home) for the R.A.F. in World War II. concluded with the immortal words: “This velocity is so nearly that of light that it seems we have strong reason But, to the author, the priority for the invention of radar should go to conclude that light itself (including radiant heat and other radiations if to a German, Christian Hülsmeyer, a young engineer who in 1904 built and demonstrated a device to detect ships. -

Design Trade-Offs for Airborne Phased Array Radar for Atmospheric Research
Design Trade-offs for Airborne Phased Array Radar for Atmospheric Research Jorge L. Salazar, Eric Loew, Pei-Sang Tsai, V. Chandrasekar Jothiram Vivekanandan and Wen Chau Lee Colorado State University (CSU) National Center for Atmospheric Research (NCAR) NCAR Affiliate Scientist 3450 Mitchell Lane Boulder, CO 80301, USA 1373 Fort Collins, CO 80523, U Abstract - This paper discusses the design options and trade- Besides the fact that both are single-polarized and passive offs of the key performance parameters, technology, and arrays, fast electronically scanned beams have provided the costs of dual-polarized and two-dimensional active phased scientific community with higher temporal resolution array antenna for an atmospheric airborne radar system. The measurements that improve detection and warning for severe design proposed provides high-resolution measurements of high-impact weather. Tornado false alarm rates have been the air motion and rainfall characteristics of very large storms reduced substantially and the tornado warning lead times that are difficult to observe with a ground-based radar system. extended from 14 minutes to 20 minutes [4]. Parameters such as antenna size, wavelength, beamwidth, transmit power, spatial resolution, along-track resolution, and Considering the benefit of phased array technology, polarization have been evaluated. The paper presents a academic, state, federal, and private institutions have been performance evaluation of the radar system. Preliminary working together to develop phased-array radar for results from the antenna front-end section that corresponds to atmospheric applications. Currently, the Massachusetts a Line Replacement Unit (LRU) are presented. Institute of Technology’s Lincoln Laboratory (MIT-LL) is developing a multifunction, two-dimensional (2-D), dual-pol, Index Terms – Airborne Doppler radar, ELDORA, phased flat and multifunction S-band radar system [6]. -

CMA-2012 Doppler Velocity Sensor and Navigation System
CMA-2012 Doppler Velocity Sensor and Navigation System High Accuracy Velocity Sensor Ideally Suited for Helicopter Operations The CMA-2012 Doppler Velocity Sensor and The CMA-2012’s superior accuracy and performance are Navigation System represents the culmination achieved by integrating several technologies into one compact, of CMC Electronics’ 50 years of experience in low weight unit. A frequency modulation/continuous wave (FM/CW) modulation technique, together with a four-beam Janus airborne Doppler radar and navigation systems. It configuration, is optimized for low-speed conditions. A dynamic is particularly well suited for helicopter hover and carrier breakthrough circuit lowers hover drift. Signal returns then low-speed operations, such as anti-submarine undergo digital signal processing to optimize signal acquisition warfare and SAR, and for weapons targeting during over marginal terrain, such as smooth water, sand or snow, and tactical flight manoeuvres, where the highest enhance tracking precision accuracy. Pitch, roll and yaw heading accuracy velocity sensor is required to ensure inputs further enhance the CMA-2012’s performance during mission accomplishment. dynamic helicopter movements. With the input of pitch, roll and heading information, the CMA-2012 can provide Doppler navigation system functions, compute present position and other navigation information, and output navigation data to CMC’s or other multifunction CDUs via a digital data bus. Extensive flight testing of the CMA-2012 has demonstrated its excellent performance. -

Radar Artifacts and Associated Signatures, Along with Impacts of Terrain on Data Quality
Radar Artifacts and Associated Signatures, Along with Impacts of Terrain on Data Quality 1.) Introduction: The WSR-88D (Weather Surveillance Radar designed and built in the 80s) is the most useful tool used by National Weather Service (NWS) Meteorologists to detect precipitation, calculate its motion, estimate its type (rain, snow, hail, etc) and forecast its position. Radar stands for “Radio, Detection, and Ranging”, was developed in the 1940’s and used during World War II, has gone through numerous enhancements and technological upgrades to help forecasters investigate storms with greater detail and precision. However, as our ability to detect areas of precipitation, including rotation within thunderstorms has vastly improved over the years, so has the radar’s ability to detect other significant meteorological and non meteorological artifacts. In this article we will identify these signatures, explain why and how they occur and provide examples from KTYX and KCXX of both meteorological and non meteorological data which WSR-88D detects. KTYX radar is located on the Tug Hill Plateau near Watertown, NY while, KCXX is located in Colchester, VT with both operated by the NWS in Burlington. Radar signatures to be shown include: bright banding, tornadic hook echo, low level lake boundary, hail spikes, sunset spikes, migrating birds, Route 7 traffic, wind farms, and beam blockage caused by terrain and the associated poor data sampling that occurs. 2.) How Radar Works: The WSR-88D operates by sending out directional pulses at several different elevation angles, which are microseconds long, and when the pulse intersects water droplets or other artifacts, a return signal is sent back to the radar. -

Microwave Radar/Radiometer for Arctic Clouds (Mirac): First Insights from the ACLOUD Campaign
Atmos. Meas. Tech., 12, 5019–5037, 2019 https://doi.org/10.5194/amt-12-5019-2019 © Author(s) 2019. This work is distributed under the Creative Commons Attribution 4.0 License. Microwave Radar/radiometer for Arctic Clouds (MiRAC): first insights from the ACLOUD campaign Mario Mech1, Leif-Leonard Kliesch1, Andreas Anhäuser1, Thomas Rose2, Pavlos Kollias1,3, and Susanne Crewell1 1Institute for Geophysics and Meteorology, University of Cologne, Cologne, Germany 2Radiometer-Physics GmbH, Meckenheim, Germany 3School of Marine and Atmospheric Sciences, Stony Brook University, NY, USA Correspondence: Mario Mech ([email protected]) Received: 12 April 2019 – Discussion started: 23 April 2019 Revised: 26 July 2019 – Accepted: 11 August 2019 – Published: 18 September 2019 Abstract. The Microwave Radar/radiometer for Arctic vertical resolution down to about 150 m above the surface Clouds (MiRAC) is a novel instrument package developed is able to show to some extent what is missed by Cloud- to study the vertical structure and characteristics of clouds Sat when observing low-level clouds. This is especially im- and precipitation on board the Polar 5 research aircraft. portant for the Arctic as about 40 % of the clouds during MiRAC combines a frequency-modulated continuous wave ACLOUD showed cloud tops below 1000 m, i.e., the blind (FMCW) radar at 94 GHz including a 89 GHz passive chan- zone of CloudSat. In addition, with MiRAC-A 89 GHz it is nel (MiRAC-A) and an eight-channel radiometer with fre- possible to get an estimate of the sea ice concentration with a quencies between 175 and 340 GHz (MiRAC-P). -

Quantification of Bird Migration Using Doppler Weather Surveillance Radars
A Thesis entitled Quantification of Bird Migration Using Doppler Weather Surveillance Radars (NEXRAD) by Priyadarsini Komatineni Submitted to the Graduate Faculty as partial fulfillment of the requirements for the Master of Science Degree in Electrical Engineering Dr. Mohsin M. Jamali, Committee Chair Dr. Junghwan Kim, Committee Member Dr. Peter V. Gorsevski, Committee Member Dr. Patricia R. Komuniecki, Dean College of Graduate Studies The University of Toledo August 2012 Copyright 2012, Priyadarsini Komatineni This document is copyrighted material. Under copyright law, no parts of this document may be reproduced without the expressed permission of the author. An Abstract of Quantification of Bird Migration Using Doppler Weather Surveillance Radars (NEXRAD) by Priyadarsini Komatineni Submitted to the Graduate Faculty as partial fulfillment of the requirements for the Master of Science Degree in Electrical Engineering and Computer Science The University of Toledo August 2012 Wind Energy is an important renewable source in United States. Since past few years, the growth of wind farms construction has significantly increased, due to which there is an increase in number of bird deaths. Therefore, ornithologists began to study the bird’s behavior during different migration periods. So far ornithologists have used many methods to study the bird migration patterns in which the radar ornithology has been used in an innovative way. However, many studies have focused using small portable radars and recently researchers have proved that the migration events can be studied through large broad scale radars like NEXRAD. Throughout the United States, NEXRAD has 160 Doppler Weather Surveillance Radars. The advantage of NEXRAD is that it can provide bird migration movements over a broad geographical scale and can be accessed free of charge.