The Thomas Precession and the Transformation to Rotating Frames
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A Mathematical Derivation of the General Relativistic Schwarzschild
A Mathematical Derivation of the General Relativistic Schwarzschild Metric An Honors thesis presented to the faculty of the Departments of Physics and Mathematics East Tennessee State University In partial fulfillment of the requirements for the Honors Scholar and Honors-in-Discipline Programs for a Bachelor of Science in Physics and Mathematics by David Simpson April 2007 Robert Gardner, Ph.D. Mark Giroux, Ph.D. Keywords: differential geometry, general relativity, Schwarzschild metric, black holes ABSTRACT The Mathematical Derivation of the General Relativistic Schwarzschild Metric by David Simpson We briefly discuss some underlying principles of special and general relativity with the focus on a more geometric interpretation. We outline Einstein’s Equations which describes the geometry of spacetime due to the influence of mass, and from there derive the Schwarzschild metric. The metric relies on the curvature of spacetime to provide a means of measuring invariant spacetime intervals around an isolated, static, and spherically symmetric mass M, which could represent a star or a black hole. In the derivation, we suggest a concise mathematical line of reasoning to evaluate the large number of cumbersome equations involved which was not found elsewhere in our survey of the literature. 2 CONTENTS ABSTRACT ................................. 2 1 Introduction to Relativity ...................... 4 1.1 Minkowski Space ....................... 6 1.2 What is a black hole? ..................... 11 1.3 Geodesics and Christoffel Symbols ............. 14 2 Einstein’s Field Equations and Requirements for a Solution .17 2.1 Einstein’s Field Equations .................. 20 3 Derivation of the Schwarzschild Metric .............. 21 3.1 Evaluation of the Christoffel Symbols .......... 25 3.2 Ricci Tensor Components ................. -

Thomas Precession and Thomas-Wigner Rotation: Correct Solutions and Their Implications
epl draft Header will be provided by the publisher This is a pre-print of an article published in Europhysics Letters 129 (2020) 3006 The final authenticated version is available online at: https://iopscience.iop.org/article/10.1209/0295-5075/129/30006 Thomas precession and Thomas-Wigner rotation: correct solutions and their implications 1(a) 2 3 4 ALEXANDER KHOLMETSKII , OLEG MISSEVITCH , TOLGA YARMAN , METIN ARIK 1 Department of Physics, Belarusian State University – Nezavisimosti Avenue 4, 220030, Minsk, Belarus 2 Research Institute for Nuclear Problems, Belarusian State University –Bobrujskaya str., 11, 220030, Minsk, Belarus 3 Okan University, Akfirat, Istanbul, Turkey 4 Bogazici University, Istanbul, Turkey received and accepted dates provided by the publisher other relevant dates provided by the publisher PACS 03.30.+p – Special relativity Abstract – We address to the Thomas precession for the hydrogenlike atom and point out that in the derivation of this effect in the semi-classical approach, two different successions of rotation-free Lorentz transformations between the laboratory frame K and the proper electron’s frames, Ke(t) and Ke(t+dt), separated by the time interval dt, were used by different authors. We further show that the succession of Lorentz transformations KKe(t)Ke(t+dt) leads to relativistically non-adequate results in the frame Ke(t) with respect to the rotational frequency of the electron spin, and thus an alternative succession of transformations KKe(t), KKe(t+dt) must be applied. From the physical viewpoint this means the validity of the introduced “tracking rule”, when the rotation-free Lorentz transformation, being realized between the frame of observation K and the frame K(t) co-moving with a tracking object at the time moment t, remains in force at any future time moments, too. -

Chapter 5 the Relativistic Point Particle
Chapter 5 The Relativistic Point Particle To formulate the dynamics of a system we can write either the equations of motion, or alternatively, an action. In the case of the relativistic point par- ticle, it is rather easy to write the equations of motion. But the action is so physical and geometrical that it is worth pursuing in its own right. More importantly, while it is difficult to guess the equations of motion for the rela- tivistic string, the action is a natural generalization of the relativistic particle action that we will study in this chapter. We conclude with a discussion of the charged relativistic particle. 5.1 Action for a relativistic point particle How can we find the action S that governs the dynamics of a free relativis- tic particle? To get started we first think about units. The action is the Lagrangian integrated over time, so the units of action are just the units of the Lagrangian multiplied by the units of time. The Lagrangian has units of energy, so the units of action are L2 ML2 [S]=M T = . (5.1.1) T 2 T Recall that the action Snr for a free non-relativistic particle is given by the time integral of the kinetic energy: 1 dx S = mv2(t) dt , v2 ≡ v · v, v = . (5.1.2) nr 2 dt 105 106 CHAPTER 5. THE RELATIVISTIC POINT PARTICLE The equation of motion following by Hamilton’s principle is dv =0. (5.1.3) dt The free particle moves with constant velocity and that is the end of the story. -

Covariant Calculation of General Relativistic Effects in an Orbiting Gyroscope Experiment
PHYSICAL REVIEW D 67, 062003 ͑2003͒ Covariant calculation of general relativistic effects in an orbiting gyroscope experiment Clifford M. Will* McDonnell Center for the Space Sciences, Department of Physics, Washington University, St. Louis, Missouri 63130 ͑Received 17 December 2002; published 26 March 2003͒ We carry out a covariant calculation of the measurable relativistic effects in an orbiting gyroscope experi- ment. The experiment, currently known as Gravity Probe B, compares the spin directions of an array of spinning gyroscopes with the optical axis of a telescope, all housed in a spacecraft that rolls about the optical axis. The spacecraft is steered so that the telescope always points toward a known guide star. We calculate the variation in the spin directions relative to readout loops rigidly fixed in the spacecraft, and express the variations in terms of quantities that can be measured, to sufficient accuracy, using an Earth-centered coordi- nate system. The measurable effects include the aberration of starlight, the geodetic precession caused by space curvature, the frame-dragging effect caused by the rotation of the Earth and the deflection of light by the Sun. DOI: 10.1103/PhysRevD.67.062003 PACS number͑s͒: 04.80.Cc I. INTRODUCTION by the on-board telescope, which is to be trained on a star IM Pegasus ͑HR 8703͒ in our galaxy. One important feature of Gravity Probe B—the ‘‘gyroscope experiment’’—is a this star is that it is also a strong radio source, so that its NASA space experiment designed to measure the general direction and proper motion relative to the larger system of relativistic effect known as the dragging of inertial frames. -

Supplemental Lecture 5 Precession in Special and General Relativity
Supplemental Lecture 5 Thomas Precession and Fermi-Walker Transport in Special Relativity and Geodesic Precession in General Relativity Abstract This lecture considers two topics in the motion of tops, spins and gyroscopes: 1. Thomas Precession and Fermi-Walker Transport in Special Relativity, and 2. Geodesic Precession in General Relativity. A gyroscope (“spin”) attached to an accelerating particle traveling in Minkowski space-time is seen to precess even in a torque-free environment. The angular rate of the precession is given by the famous Thomas precession frequency. We introduce the notion of Fermi-Walker transport to discuss this phenomenon in a systematic fashion and apply it to a particle propagating on a circular orbit. In a separate discussion we consider the geodesic motion of a particle with spin in a curved space-time. The spin necessarily precesses as a consequence of the space-time curvature. We illustrate the phenomenon for a circular orbit in a Schwarzschild metric. Accurate experimental measurements of this effect have been accomplished using earth satellites carrying gyroscopes. This lecture supplements material in the textbook: Special Relativity, Electrodynamics and General Relativity: From Newton to Einstein (ISBN: 978-0-12-813720-8). The term “textbook” in these Supplemental Lectures will refer to that work. Keywords: Fermi-Walker transport, Thomas precession, Geodesic precession, Schwarzschild metric, Gravity Probe B (GP-B). Introduction In this supplementary lecture we discuss two instances of precession: 1. Thomas precession in special relativity and 2. Geodesic precession in general relativity. To set the stage, let’s recall a few things about precession in classical mechanics, Newton’s world, as we say in the textbook. -

Thomas Precession Is the Basis for the Structure of Matter and Space Preston Guynn
Thomas Precession is the Basis for the Structure of Matter and Space Preston Guynn To cite this version: Preston Guynn. Thomas Precession is the Basis for the Structure of Matter and Space. 2018. hal- 02628032 HAL Id: hal-02628032 https://hal.archives-ouvertes.fr/hal-02628032 Submitted on 26 May 2020 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Thomas Precession is the Basis for the Structure of Matter and Space Einstein's theory of special relativity was incomplete as originally formulated since it did not include the rotational effect described twenty years later by Thomas, now referred to as Thomas precession. Though Thomas precession has been accepted for decades, its relationship to particle structure is a recent discovery, first described in an article titled "Electromagnetic effects and structure of particles due to special relativity". Thomas precession acts as a velocity dependent counter-rotation, so that at a rotation velocity of 3 / 2 c , precession is equal to rotation, resulting in an inertial frame of reference. During the last year and a half significant progress was made in determining further details of the role of Thomas precession in particle structure, fundamental constants, and the galactic rotation velocity. -

Mach's Principle: Exact Frame
MACH’S PRINCIPLE: EXACT FRAME-DRAGGING BY ENERGY CURRENTS IN THE UNIVERSE CHRISTOPH SCHMID Institute of Theoretical Physics, ETH Zurich CH-8093 Zurich, Switzerland We show that the dragging of axis directions of local inertial frames by a weighted average of the energy currents in the universe (Mach’s postulate) is exact for all linear perturbations of all Friedmann-Robertson-Walker universes. 1 Mach’s Principle 1.1 The Observational Fact: ’Mach zero’ The time-evolution of local inertial axes, i.e. the local non-rotating frame is experimentally determined by the spin axes of gyroscopes, as in inertial guidance systems in airplanes and satellites. This is true both in Newtonian physics (Foucault 1852) and in General Relativity. It is an observational fact within present-day accuracy that the spin axes of gyroscopes do not precess relative to quasars. This observational fact has been named ’Mach zero’, where ’zero’ designates that this fact is not yet Mach’s principle, it is just the observational starting point. — There is an extremely small dragging effect by the rotating Earth on the spin axes of gyroscopes, the Lense - Thirring effect, which makes the spin axes of gyroscopes precess relative to quasars by 43 milli-arc-sec per year. It is hoped that one will be able to detect this effect by further analysis of the data which have been taken by Gravity Probe B. 1.2 The Question What physical cause explains the observational fact ’Mach zero’ ? Equivalently: What physical cause determines the time-evolution of gyroscope axes ? In the words of John A. -

Space, Time, and Spacetime
Fundamental Theories of Physics 167 Space, Time, and Spacetime Physical and Philosophical Implications of Minkowski's Unification of Space and Time Bearbeitet von Vesselin Petkov 1. Auflage 2010. Buch. xii, 314 S. Hardcover ISBN 978 3 642 13537 8 Format (B x L): 15,5 x 23,5 cm Gewicht: 714 g Weitere Fachgebiete > Physik, Astronomie > Quantenphysik > Relativität, Gravitation Zu Inhaltsverzeichnis schnell und portofrei erhältlich bei Die Online-Fachbuchhandlung beck-shop.de ist spezialisiert auf Fachbücher, insbesondere Recht, Steuern und Wirtschaft. Im Sortiment finden Sie alle Medien (Bücher, Zeitschriften, CDs, eBooks, etc.) aller Verlage. Ergänzt wird das Programm durch Services wie Neuerscheinungsdienst oder Zusammenstellungen von Büchern zu Sonderpreisen. Der Shop führt mehr als 8 Millionen Produkte. The Experimental Verdict on Spacetime from Gravity Probe B James Overduin Abstract Concepts of space and time have been closely connected with matter since the time of the ancient Greeks. The history of these ideas is briefly reviewed, focusing on the debate between “absolute” and “relational” views of space and time and their influence on Einstein’s theory of general relativity, as formulated in the language of four-dimensional spacetime by Minkowski in 1908. After a brief detour through Minkowski’s modern-day legacy in higher dimensions, an overview is given of the current experimental status of general relativity. Gravity Probe B is the first test of this theory to focus on spin, and the first to produce direct and unambiguous detections of the geodetic effect (warped spacetime tugs on a spin- ning gyroscope) and the frame-dragging effect (the spinning earth pulls spacetime around with it). -

A Semiclassical Kinetic Theory of Dirac Particles and Thomas
A Semiclassical Kinetic Theory of Dirac Particles and Thomas Precession Omer¨ F. DAYI and Eda KILINC¸ARSLAN Physics Engineering Department, Faculty of Science and Letters, Istanbul Technical University, TR-34469, Maslak–Istanbul, Turkey1 Kinetic theory of Dirac fermions is studied within the matrix valued differential forms method. It is based on the symplectic form derived by employing the semiclassical wave packet build of the positive energy solutions of the Dirac equation. A satisfactory definition of the distribution matrix elements imposes to work in the basis where the helicity is diagonal which is also needed to attain the massless limit. We show that the kinematic Thomas precession correction can be studied straightforwardly within this approach. It contributes on an equal footing with the Berry gauge fields. In fact in equations of motion it eliminates the terms arising from the Berry gauge fields. 1 Introduction Dirac equation which describes massive spin-1/2 particles possesses either positive or negative energy solutions described by 4-dimensional spinors. However, to furnish a well defined one particle inter- pretation, instead of employing both type of solutions, a wave packet build of only positive energy plane wave solutions should be preferred. A nonrelativistic semiclassical dynamics can be obtained employing this wave packet. Semiclassical limit may be useful to have a better understanding of some quantum mechanical phenomena. In the massless limit Dirac equation leads to two copies of Weyl arXiv:1508.00781v1 [hep-th] 4 Aug 2015 particles which possess opposite chirality. Recently, the chiral semiclassical kinetic theory has been formulated to embrace the anomalies due to the external electromagnetic fields in 3 + 1 dimensions [1, 2]. -

Physical Holonomy, Thomas Precession, and Clifford Algebra
hXWWM UWThPh 1988-39 Physical Holonomy, Thomas Precession, and Clifford Algebra H. Urbantke Institut für Theoretische Physik Universität Wien Abstract After a general discussion of the physical significance of holonomy group transfor mations, a relation between the transports of Fermi-Walker and Levi-Civitä in Special Relativity is pointed out. A well-known example - the Thomas-Wigner angle - is red- erived in a completely frame-independent manner using Clifford algebra. 1 Introduction — Holonomy Groups in Physics Quantum Holonomy has become a rather popular concept in recent /ears, in particular through the work [1] of Berry and Simon; but it is clear that the Aharanov-Bohm effect [2] is a much earlier instance of it. The point is that here the differential geometric idea of parallel transport defined by connections in fibre bundles [3] attains rather direct physical meaning susceptible to experimentation. This is remarkable because parallel transport has been around in differential geometry since 1917, and differential geometry has invaded theoretical physics since the early days of General Relativity, with new impulses coming from Hamiltonian dynamics and gauge theory: yet the significance of connections used to be formal, the 'transformation properties' standing in the forefront, as one can see from the old 'Ricci-Calculus' as used by Einstein and Grossmann [4] or from the way non- abelian gauge fields were introduced by Yang and Mills [5]. The rather indirect 'physical' realization of parallel transport in General Relativity by Schild's 'ladder construction' [6] also stresses this fact; in non-abelian gauge theory I am aware of no physical realization at all. -
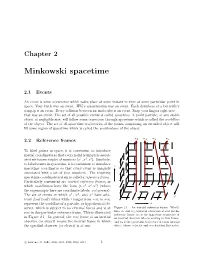
Chapter 2: Minkowski Spacetime
Chapter 2 Minkowski spacetime 2.1 Events An event is some occurrence which takes place at some instant in time at some particular point in space. Your birth was an event. JFK's assassination was an event. Each downbeat of a butterfly’s wingtip is an event. Every collision between air molecules is an event. Snap your fingers right now | that was an event. The set of all possible events is called spacetime. A point particle, or any stable object of negligible size, will follow some trajectory through spacetime which is called the worldline of the object. The set of all spacetime trajectories of the points comprising an extended object will fill some region of spacetime which is called the worldvolume of the object. 2.2 Reference frames w 1 w 2 w 3 w 4 To label points in space, it is convenient to introduce spatial coordinates so that every point is uniquely associ- ated with some triplet of numbers (x1; x2; x3). Similarly, to label events in spacetime, it is convenient to introduce spacetime coordinates so that every event is uniquely t associated with a set of four numbers. The resulting spacetime coordinate system is called a reference frame . Particularly convenient are inertial reference frames, in which coordinates have the form (t; x1; x2; x3) (where the superscripts here are coordinate labels, not powers). The set of events in which x1, x2, and x3 have arbi- x 1 trary fixed (real) values while t ranges from −∞ to +1 represent the worldline of a particle, or hypothetical ob- x 2 server, which is subject to no external forces and is at Figure 2.1: An inertial reference frame. -

Physics 209 Fall 2002 Notes 5 Thomas Precession Jackson's
Physics 209 Fall 2002 Notes 5 Thomas Precession Jackson's discussion of Thomas precession is based on Thomas's original treatment, and on the later paper by Bargmann, Michel, and Telegdi. The alternative treatment presented in these notes is more geometrical in spirit and makes greater effort to identify the aspects of the problem that are dependent on the state of the observer and those that are Lorentz and gauge invariant. There is one part of the problem that involves some algebra (the calculation of Thomas's angular velocity), and this is precisely the part that is dependent on the state of the observer (the calculation is specific to a particular Lorentz frame). The rest of the theory is actually quite simple. In the following we will choose units so that c = 1, except that the c's will be restored in some final formulas. xµ(τ) u e1 e2 e3 u `0 e3 e1 `1 e2 `2 `3 µ Fig. 5.1. Lab frame f`αg and conventional rest frames feαg along the world line x (τ) of a particle. The time-like basis vector e0 of the conventional rest frame is the same as the world velocity u of the particle. The spatial axes of the conventional rest frame fei; i = 1; 2; 3g span the three-dimensional space-like hyperplane orthogonal to the world line. To begin we must be careful of the phrase \the rest frame of the particle," which is used frequently in relativity theory and in the theory of Thomas precession. The geometrical situation is indicated schematically in Fig.