ELM327 OBD to RS232 Interpreter
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Hh Obd Advanced Version Elm327 Driver Windows 10 Download GENDAN ELM327 DRIVER WINDOWS
hh obd advanced version elm327 driver windows 10 download GENDAN ELM327 DRIVER WINDOWS. This elm327 interface is compatible with a number of iphone applications, such as rev, dash command and obd car doctor used with appropriate software, this interface will. Dec philips software with advanced functions. Receiving a 93/100 rating by 208 users. Gendan elm327 wi-fi interfaces, windows 7 network configuration there are a number of ways to configure your pc to connect to our elm327 wi-fi diagnostics interface. Select settings and then click control panel near the top of the menu, then select the device manager option in control panel, this is the most simple procedure that we have found to offer a quick way to connect. In addition to the software, you need separate elm327-based obd-ii adapter to connect to your vehicle! I've been asked a couple of times about supplying people with elm327 drivers but i've been unable to untill now. Tell us what s anything wrong with any obd2 elm327. Pc & mac, download, the links below allow you to download the full version of obd auto doctor for free. Elm327 usb interface driver for windows 7 32 bit, windows 7 64 bit, windows 10, 8, xp. Présentation de Denis, Le monde du diag auto. ELM327 Interface. Uploaded on, downloaded 6838 times, receiving a 93/100 rating by 5650 users. This list was created with elm327 1.5 version for several years. Using elm electronics firmware, it's #1 best diagnostic tool on the market. Multiecuscan diagnostic package for fiat / alfa romeo / lancia cars single pc view more images. -

Vehicle Diagnostic Monitoring System
Vehicle Diagnostic Monitoring System ARSLAN SHAHID ARSLAN TARIQ FAISAL M. SALEEM Abstract Vehicle Diagnostic Monitoring System is a new dimension in the field of Automobiles. It consists of an On-Board Diagnostic System which is a core element of all the modern day vehicles, and a communication system. This system collects the data from the vehicle’s On-Board Computer; ECU (Electronic Control Unit) and sends it to a remote location through a GSM modem, to monitor the performance and maintain statistics. This system can enhance Vehicle’s performance by periodic inspections from remote locations. Vehicle Diagnostic Monitoring System comprises of two parts. The first part is the data acquisition circuit and will be connected to the Vehicle’s OBD-II interface. It will get data from the OBD-II system by using some commands and then will convert the returned hex values to easily understandable form. The converted values will then be displayed on an in-vehicle display unit. Next it will send this data to the second part of the project, the communication circuit through serial interface. This circuit comprises of a GSM modem. The GSM modem will then send this data to a remote location over the air through SMS. This project will provide advantage to both, the vehicle owner and the vehicle manufacturer. The vehicle owner can inspect his Vehicle from remote locations and can have all the information about his vehicle no matter where he is. The Vehicle Manufacturers can analyze the performance of their vehicles from remote locations and thus can know the pros and cons of different systems being used in the vehicle. -
ELM327 OBD to RS232 Interpreter
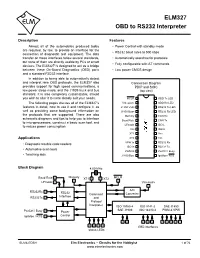
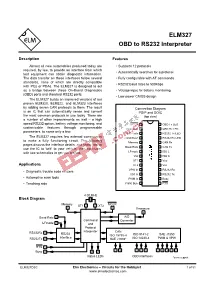
ELM327 OBD to RS232 Interpreter Description Features Almost all of the automobiles produced today • Power Control with standby mode are required, by law, to provide an interface for the • RS232 baud rates to 500 kbps connection of diagnostic test equipment. The data transfer on these interfaces follow several standards, • Automatically searches for protocols but none of them are directly usable by PCs or smart • Fully configurable with AT commands devices. The ELM327 is designed to act as a bridge between these On-Board Diagnostics (OBD) ports • Low power CMOS design and a standard RS232 interface. In addition to being able to automatically detect and interpret nine OBD protocols, the ELM327 also Connection Diagram provides support for high speed communications, a PDIP and SOIC low power sleep mode, and the J1939 truck and bus (top view) standard. It is also completely customizable, should you wish to alter it to more closely suit your needs. MCLR OBD Tx LED The following pages discuss all of the ELM327’s Vmeasure OBD Rx LED features in detail, how to use it and configure it, as J1850 Volts RS232 Tx LED well as providing some background information on J1850 Bus+ RS232 Rx LED the protocols that are supported. There are also Memory CAN Rx schematic diagrams and tips to help you to interface Baud Rate CAN Tx to microprocessors, construct a basic scan tool, and LFmode ISO L to reduce power consumption. VSS ISO K XT1 VDD Applications XT2 VSS • Diagnostic trouble code readers VPW In RS232 Rx ISO In RS232 Tx • Automotive scan tools PWM In PwrCtrl -

Creating a Wireless OBDII Scanner
Project Number: MQP-SJB-4C09 Creating A Wireless OBDII Scanner A Major Qualifying Project Report Submitted to the Faculty of the WORCESTER POLYTECHNIC INSTITUTE In partial fulfillment of the requirements for the Degree of Bachelor of Science in Electrical and Computer Engineering by _________________________ John Keenan III This 30th day of April, 2009. Project Advisor: __________________________________ Professor Stephen J. Bitar 1 Abstract This project consisted of the creation of a wireless On-Board Diagnostics scan tool which implemented communications wirelessly. The main goal of the project was to be able to read codes from a diagnostics port on a vehicle and report the codes wirelessly to a computer receiver. The end result was a wireless communication device which utilized standard RS232 data communication to send and receive codes. 2 Table of Contents Abstract ........................................................................................................................................... 1 Table of Figures .............................................................................................................................. 5 Table of Tables ............................................................................................................................... 6 1 Background ............................................................................................................................. 7 1.1 The Clean Air Act ........................................................................................................... -
![Obd2 Pid Reader]](https://docslib.b-cdn.net/cover/6441/obd2-pid-reader-3746441.webp)
Obd2 Pid Reader]
June 2013 CPE Senior Project Andrew Fong [OBD2 PID READER] Table of Contents Table of Contents .......................................................................................................................................... 2 List of Tables and Figures .............................................................................................................................. 3 Acknowledgements ....................................................................................................................................... 4 Abstract ......................................................................................................................................................... 5 I. Introduction ............................................................................................................................................... 6 II. Background ............................................................................................................................................... 7 III. Requirements ........................................................................................................................................... 8 IV. Design ...................................................................................................................................................... 9 VI. Development ......................................................................................................................................... 10 V. Testing and Results ................................................................................................................................ -
ELM327 OBD to RS232 Interpreter
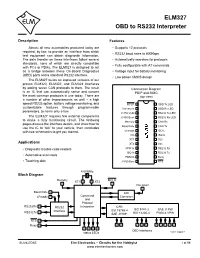
ELM327 OBD to RS232 Interpreter Description Features Almost all new automobiles produced today are • Supports 12 protocols required, by law, to provide an interface from which • RS232 baud rates to 500Kbps test equipment can obtain diagnostic information. The data transfer on these interfaces follow several • Automatically searches for protocols standards, none of which are directly compatible • Fully configurable with AT commands with PCs or PDAs. The ELM327 is designed to act as a bridge between these On-Board Diagnostics • Voltage input for battery monitoring (OBD) ports and a standard RS232 interface. • Low power CMOS design The ELM327 builds on improved versions of our proven ELM320, ELM322, and ELM323 interfaces by adding seven CAN protocols to them. The result Connection Diagram is an IC that can automatically sense and convert PDIP and SOIC the most common protocols in use today. There are (top view) a number of other improvements as well – a high speed RS232 option, battery voltage monitoring, and MCLR OBD Tx LED customizable features through programmable Vmeasure OBD Rx LED parameters, to name only a few. J1850 Volts RS232 Tx LED The ELM327 requires few external components J1850 Bus+ RS232 Rx LED to make a fully functioning circuit. The following Memory CAN Rx pages discuss the interface details, and show how to Baud Rate CAN Tx use the IC to ‘talk’ to your vehicle, then concludes with two schematics to get you started. LFmode ISO L VSS ISO K XT1 VDD Applications XT2 VSS • Diagnostic trouble code readers VPW In RS232 Rx ISO -
ELM327 OBD to RS232 Interpreter
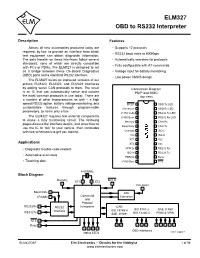
ELM327 OBD to RS232 Interpreter Description Features Almost all new automobiles produced today are • Supports 12 protocols required, by law, to provide an interface from which • RS232 baud rates to 500Kbps test equipment can obtain diagnostic information. The data transfer on these interfaces follow several • Automatically searches for protocols standards, none of which are directly compatible • Fully configurable with AT commands with PCs or PDAs. The ELM327 is designed to act as a bridge between these On-Board Diagnostics • Voltage input for battery monitoring (OBD) ports and a standard RS232 interface. • Low power CMOS design The ELM327 builds on improved versions of our proven ELM320, ELM322, and ELM323 interfaces by adding seven CAN protocols to them. The result Connection Diagram is an IC that can automatically sense and convert PDIP and SOIC the most common protocols in use today. There are (top view) a number of other improvements as well – a high speed RS232 option, battery voltage monitoring, and MCLR OBD Tx LED customizable features through programmable Vmeasure OBD Rx LED parameters, to name only a few. J1850 Volts RS232 Tx LED The ELM327 requires few external components J1850 Bus+ RS232 Rx LED to make a fully functioning circuit. The following Memory CAN Rx pages discuss the interface details, and show how to Baud Rate CAN Tx use the IC to ‘talk’ to your vehicle, then concludes with two schematics to get you started. LFmode ISO L VSS ISO K XT1 VDD Applications XT2 VSS • Diagnostic trouble code readers VPW In RS232 Rx ISO -

OBD II Diagnostic Logger Final Report
OBDII Diagnostic Logger Design and Implementation UNIVERSITY OF ALASKA ANCHORAGE CSCE A470 CAPSTONE PROJECT Author: Kristian Smith Supervisor: Prof. Randy Moulic, PhD Anchorage AK, May 2015 OBDII Diagnostic Logger Design and Implementation © Copyright 2015 by Kristian Smith [email protected] Version 5.3 OBDII Diagnostic Logger Design and Implementation Abstract— The basis for this research involves logging various sensor data from a large sample population of automobiles. The device necessary for such a task has to be capable of streaming On-Board Diagnostics and real-time GPS coordinates to a remote server for data logging. After discovering a multitude of web- based companies currently designing OBD tools, it became evident that the market was flooded with de- vices focused primarily on localized data logging versus remote logging for a large scale deployment. This led to a decision of compiling a device using the Arduino framework due to its affordability, support net- work, and overall adaptability. Using an Arduino Uno microprocessor, we were able to integrate GPS and GSM cellular shields for location and data streaming, respectively. An OBDII board was also obtained to access vehicle sensor data and other diagnostic information. The primary benefits of the proposed device include full access to any data available through OBDII/CAN protocols, and adaptability for on-device data processing and/or cellular transmission. With this tool, many future research opportunities arise in- cluding those in the fields of regional emissions analysis (our current focus), automated road condition no- tification, and adaptive maintenance strategies. OBDII Diagnostic Logger Design and Implementation Introduction The ability to apply locality and time to vehicle data proves itself to be beneficial for numerous re- search applications. -
Design of an Information System for Vehicle Diagnostic Trouble Codes
Design of an information system for vehicle diagnostic trouble codes Master of Science Thesis in the Master Degree Programme, Computer Systems and Networks Alexander Hentschel Erik Nordlander Department of Computer Science and Engineering Division of Networks and Systems CHALMERS UNIVERSITY OF TECHNOLOGY Göteborg, Sweden, 2013 The Author grants to Chalmers University of Technology and University of Gothenburg the non- exclusive right to publish the Work electronically and in a non-commercial purpose make it accessible on the Internet. The Author warrants that he/she is the author to the Work, and warrants that the Work does not contain text, pictures or other material that violates copyright law. The Author shall, when transferring the rights of the Work to a third party (for example a publisher or a company), acknowledge the third party about this agreement. If the author has signed a copyright agreement with a third party regarding the Work, the author warrants hereby that he/she has obtained any necessary permission from this third party to let Chalmers University of Technology and University of Gothenburg store the Work electronically and make it accessible on the Internet. Design of an information system for vehicle diagnostic trouble codes Alexander Hentschel Erik Nordlander Examiner: Peter Lundin CHALMERS UNIVERSITY OF TECHNOLOGY Department of Computer Science and Engineering SE-412 96, Göteborg, Sweden Telephone + 46 (0)31-772 1000 Cover: A malfunction indicator light from a car's dashboard. Department of Computer Science and Engineering Division of Networks and Systems CHALMERS UNIVERSITY OF TECHNOLOGY Göteborg, Sweden, 2013 Design of an information system for vehicle diagnostic trouble codes ALEXANDER HENTSCHEL ERIK NORDLANDER Department of Computer Science and Engineering Division of Networks and Systems CHALMERS UNIVERSITY OF TECHNOLOGY Göteborg, Sweden 2013 Abstract A system has been developed to communicate with the On Board Diagnostics system of a car using the Controller Area Network communication protocol. -
Family Reference and Programming Manual (FRPM)
OBDLink® Family Reference and Programming Manual (FRPM) OBDLink Family Table of Contents 1.0 Overview .......................................................................................................................................................... 4 2.0 Objective of This Manual ................................................................................................................................. 4 3.0 OBDLink Product Family .................................................................................................................................. 4 3.1 OBDLink Devices ........................................................................................................................................ 4 3.2 OBDLink ICs ................................................................................................................................................ 5 4.0 Feature Highlights ............................................................................................................................................ 5 5.0 Typical Applications ......................................................................................................................................... 5 6.0 Communicating with the OBDLink ................................................................................................................... 6 7.0 AT Commands ................................................................................................................................................. 7 7.1 AT Command -
ELM327 OBD to RS232 Interpreter
ELM327 OBD to RS232 Interpreter Description Features Almost all new automobiles produced today are • Supports 12 protocols required, by law, to provide an interface from which • Automatically searches for a protocol test equipment can obtain diagnostic information. The data transfer on these interfaces follow several • Fully configurable with AT commands standards, none of which are directly compatible • RS232 baud rates to 500Kbps with PCs or PDAs. The ELM327 is designed to act as a bridge between these On-Board Diagnostics • Voltage input for battery monitoring (OBD) ports and standard RS232 ports. • Low power CMOS design The ELM327 builds on improved versions of our proven ELM320, ELM322, and ELM323 interfaces by adding seven CAN protocols to them. The result Connection Diagram is an IC that can automatically sense and convert PDIP and SOIC the most common protocols in use today. There are (top view) a number of other improvements as well – a high speed RS232 option, battery voltage monitoring, and MCLR OBD Tx LED customizable features through programmable Vmeasure OBD Rx LED parameters, to name only a few. J1850 Volts RS232 Tx LED The ELM327 requires few external components J1850 Bus+ RS232 Rx LED to make a fully functioning circuit. The following Memory CAN Rx pages discuss the interface details, and show how to Baud Rate CAN Tx use the IC to ‘talk’ to your vehicle, then concludes with two schematics to get you started. LFmode ISO L VSS ISO K XT1 VDD Applications XT2 VSS • Diagnostic trouble code readers VPW In RS232 Rx ISO In RS232