Integration Basics Concepts of Primary Interest: Riemann Sum
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Directional Derivative the Derivative of a Real Valued Function (Scalar field) with Respect to a Vector
Math 253 The Directional Derivative The derivative of a real valued function (scalar field) with respect to a vector. f(x + h) f(x) What is the vector space analog to the usual derivative in one variable? f 0(x) = lim − ? h 0 h ! x -2 0 2 5 Suppose f is a real valued function (a mapping f : Rn R). ! (e.g. f(x; y) = x2 y2). − 0 Unlike the case with plane figures, functions grow in a variety of z ways at each point on a surface (or n{dimensional structure). We'll be interested in examining the way (f) changes as we move -5 from a point X~ to a nearby point in a particular direction. -2 0 y 2 Figure 1: f(x; y) = x2 y2 − The Directional Derivative x -2 0 2 5 We'll be interested in examining the way (f) changes as we move ~ in a particular direction 0 from a point X to a nearby point . z -5 -2 0 y 2 Figure 2: f(x; y) = x2 y2 − y If we give the direction by using a second vector, say ~u, then for →u X→ + h any real number h, the vector X~ + h~u represents a change in X→ position from X~ along a line through X~ parallel to ~u. →u →u h x Figure 3: Change in position along line parallel to ~u The Directional Derivative x -2 0 2 5 We'll be interested in examining the way (f) changes as we move ~ in a particular direction 0 from a point X to a nearby point . -

Cauchy Integral Theorem
Cauchy’s Theorems I Ang M.S. Augustin-Louis Cauchy October 26, 2012 1789 – 1857 References Murray R. Spiegel Complex V ariables with introduction to conformal mapping and its applications Dennis G. Zill , P. D. Shanahan A F irst Course in Complex Analysis with Applications J. H. Mathews , R. W. Howell Complex Analysis F or Mathematics and Engineerng 1 Summary • Cauchy Integral Theorem Let f be analytic in a simply connected domain D. If C is a simple closed contour that lies in D , and there is no singular point inside the contour, then ˆ f (z) dz = 0 C • Cauchy Integral Formula (For simple pole) If there is a singular point z0 inside the contour, then ˛ f(z) dz = 2πj f(z0) z − z0 • Generalized Cauchy Integral Formula (For pole with any order) ˛ f(z) 2πj (n−1) n dz = f (z0) (z − z0) (n − 1)! • Cauchy Inequality M · n! f (n)(z ) ≤ 0 rn • Gauss Mean Value Theorem ˆ 2π ( ) 1 jθ f(z0) = f z0 + re dθ 2π 0 1 2 Related Mathematics Review 2.1 Stoke’s Theorem ¨ ˛ r × F¯ · dS = F¯ · dr Σ @Σ (The proof is skipped) ¯ Consider F = (FX ;FY ;FZ ) 0 1 x^ y^ z^ B @ @ @ C r × F¯ = det B C @ @x @y @z A FX FY FZ Let FZ = 0 0 1 x^ y^ z^ B @ @ @ C r × F¯ = det B C @ @x @y @z A FX FY 0 dS =ndS ^ , for dS = dxdy , n^ =z ^ . By z^ · z^ = 1 , consider z^ component only for r × F¯ 0 1 x^ y^ z^ ( ) B @ @ @ C @F @F r × F¯ = det B C = Y − X z^ @ @x @y @z A @x @y FX FY 0 i.e. -

Riemann Sums Fundamental Theorem of Calculus Indefinite
Riemann Sums Partition P = {x0, x1, . , xn} of an interval [a, b]. ck ∈ [xk−1, xk] Pn R(f, P, a, b) = k=1 f(ck)∆xk As the widths ∆xk of the subintervals approach 0, the Riemann Sums hopefully approach a limit, the integral of f from a to b, written R b a f(x) dx. Fundamental Theorem of Calculus Theorem 1 (FTC-Part I). If f is continuous on [a, b], then F (x) = R x 0 a f(t) dt is defined on [a, b] and F (x) = f(x). Theorem 2 (FTC-Part II). If f is continuous on [a, b] and F (x) = R R b b f(x) dx on [a, b], then a f(x) dx = F (x) a = F (b) − F (a). Indefinite Integrals Indefinite Integral: R f(x) dx = F (x) if and only if F 0(x) = f(x). In other words, the terms indefinite integral and antiderivative are synonymous. Every differentiation formula yields an integration formula. Substitution Rule For Indefinite Integrals: If u = g(x), then R f(g(x))g0(x) dx = R f(u) du. For Definite Integrals: R b 0 R g(b) If u = g(x), then a f(g(x))g (x) dx = g(a) f( u) du. Steps in Mechanically Applying the Substitution Rule Note: The variables do not have to be called x and u. (1) Choose a substitution u = g(x). du (2) Calculate = g0(x). dx du (3) Treat as if it were a fraction, a quotient of differentials, and dx du solve for dx, obtaining dx = . -

1 Mean Value Theorem 1 1.1 Applications of the Mean Value Theorem
Seunghee Ye Ma 8: Week 5 Oct 28 Week 5 Summary In Section 1, we go over the Mean Value Theorem and its applications. In Section 2, we will recap what we have covered so far this term. Topics Page 1 Mean Value Theorem 1 1.1 Applications of the Mean Value Theorem . .1 2 Midterm Review 5 2.1 Proof Techniques . .5 2.2 Sequences . .6 2.3 Series . .7 2.4 Continuity and Differentiability of Functions . .9 1 Mean Value Theorem The Mean Value Theorem is the following result: Theorem 1.1 (Mean Value Theorem). Let f be a continuous function on [a; b], which is differentiable on (a; b). Then, there exists some value c 2 (a; b) such that f(b) − f(a) f 0(c) = b − a Intuitively, the Mean Value Theorem is quite trivial. Say we want to drive to San Francisco, which is 380 miles from Caltech according to Google Map. If we start driving at 8am and arrive at 12pm, we know that we were driving over the speed limit at least once during the drive. This is exactly what the Mean Value Theorem tells us. Since the distance travelled is a continuous function of time, we know that there is a point in time when our speed was ≥ 380=4 >>> speed limit. As we can see from this example, the Mean Value Theorem is usually not a tough theorem to understand. The tricky thing is realizing when you should try to use it. Roughly speaking, we use the Mean Value Theorem when we want to turn the information about a function into information about its derivative, or vice-versa. -
Definition of Riemann Integrals
The Definition and Existence of the Integral Definition of Riemann Integrals Definition (6.1) Let [a; b] be a given interval. By a partition P of [a; b] we mean a finite set of points x0; x1;:::; xn where a = x0 ≤ x1 ≤ · · · ≤ xn−1 ≤ xn = b We write ∆xi = xi − xi−1 for i = 1;::: n. The Definition and Existence of the Integral Definition of Riemann Integrals Definition (6.1) Now suppose f is a bounded real function defined on [a; b]. Corresponding to each partition P of [a; b] we put Mi = sup f (x)(xi−1 ≤ x ≤ xi ) mi = inf f (x)(xi−1 ≤ x ≤ xi ) k X U(P; f ) = Mi ∆xi i=1 k X L(P; f ) = mi ∆xi i=1 The Definition and Existence of the Integral Definition of Riemann Integrals Definition (6.1) We put Z b fdx = inf U(P; f ) a and we call this the upper Riemann integral of f . We also put Z b fdx = sup L(P; f ) a and we call this the lower Riemann integral of f . The Definition and Existence of the Integral Definition of Riemann Integrals Definition (6.1) If the upper and lower Riemann integrals are equal then we say f is Riemann-integrable on [a; b] and we write f 2 R. We denote the common value, which we call the Riemann integral of f on [a; b] as Z b Z b fdx or f (x)dx a a The Definition and Existence of the Integral Left and Right Riemann Integrals If f is bounded then there exists two numbers m and M such that m ≤ f (x) ≤ M if (a ≤ x ≤ b) Hence for every partition P we have m(b − a) ≤ L(P; f ) ≤ U(P; f ) ≤ M(b − a) and so L(P; f ) and U(P; f ) both form bounded sets (as P ranges over partitions). -

MATH 25B Professor: Bena Tshishiku Michele Tienni Lowell House
MATH 25B Professor: Bena Tshishiku Michele Tienni Lowell House Cambridge, MA 02138 [email protected] Please note that these notes are not official and they are not to be considered as a sub- stitute for your notes. Specifically, you should not cite these notes in any of the work submitted for the class (problem sets, exams). The author does not guarantee the accu- racy of the content of this document. If you find a typo (which will probably happen) feel free to email me. Contents 1. January 225 1.1. Functions5 1.2. Limits6 2. January 247 2.1. Theorems about limits7 2.2. Continuity8 3. January 26 10 3.1. Continuity theorems 10 4. January 29 – Notes by Kim 12 4.1. Least Upper Bound property (the secret sauce of R) 12 4.2. Proof of the intermediate value theorem 13 4.3. Proof of the boundedness theorem 13 5. January 31 – Notes by Natalia 14 5.1. Generalizing the boundedness theorem 14 5.2. Subsets of Rn 14 5.3. Compactness 15 6. February 2 16 6.1. Onion ring theorem 16 6.2. Proof of Theorem 6.5 17 6.3. Compactness of closed rectangles 17 6.4. Further applications of compactness 17 7. February 5 19 7.1. Derivatives 19 7.2. Computing derivatives 20 8. February 7 22 8.1. Chain rule 22 Date: April 25, 2018. 1 8.2. Meaning of f 0 23 9. February 9 25 9.1. Polynomial approximation 25 9.2. Derivative magic wands 26 9.3. Taylor’s Theorem 27 9.4. -

The Mean Value Theorem) – Be Able to Precisely State the Mean Value Theorem and Rolle’S Theorem
Math 220 { Test 3 Information The test will be given during your lecture period on Wednesday (April 27, 2016). No books, notes, scratch paper, calculators or other electronic devices are allowed. Bring a Student ID. It may be helpful to look at • http://www.math.illinois.edu/~murphyrf/teaching/M220-S2016/ { Volumes worksheet, quizzes 8, 9, 10, 11 and 12, and Daily Assignments for a summary of each lecture • https://compass2g.illinois.edu/ { Homework solutions • http://www.math.illinois.edu/~murphyrf/teaching/M220/ { Tests and quizzes in my previous courses • Section 3.10 (Linear Approximation and Differentials) { Be able to use a tangent line (or differentials) in order to approximate the value of a function near the point of tangency. • Section 4.2 (The Mean Value Theorem) { Be able to precisely state The Mean Value Theorem and Rolle's Theorem. { Be able to decide when functions satisfy the conditions of these theorems. If a function does satisfy the conditions, then be able to find the value of c guaranteed by the theorems. { Be able to use The Mean Value Theorem, Rolle's Theorem, or earlier important the- orems such as The Intermediate Value Theorem to prove some other fact. In the homework these often involved roots, solutions, x-intercepts, or intersection points. • Section 4.8 (Newton's Method) { Understand the graphical basis for Newton's Method (that is, use the point where the tangent line crosses the x-axis as your next estimate for a root of a function). { Be able to apply Newton's Method to approximate roots, solutions, x-intercepts, or intersection points. -
The Definite Integrals of Cauchy and Riemann
Ursinus College Digital Commons @ Ursinus College Transforming Instruction in Undergraduate Analysis Mathematics via Primary Historical Sources (TRIUMPHS) Summer 2017 The Definite Integrals of Cauchy and Riemann Dave Ruch [email protected] Follow this and additional works at: https://digitalcommons.ursinus.edu/triumphs_analysis Part of the Analysis Commons, Curriculum and Instruction Commons, Educational Methods Commons, Higher Education Commons, and the Science and Mathematics Education Commons Click here to let us know how access to this document benefits ou.y Recommended Citation Ruch, Dave, "The Definite Integrals of Cauchy and Riemann" (2017). Analysis. 11. https://digitalcommons.ursinus.edu/triumphs_analysis/11 This Course Materials is brought to you for free and open access by the Transforming Instruction in Undergraduate Mathematics via Primary Historical Sources (TRIUMPHS) at Digital Commons @ Ursinus College. It has been accepted for inclusion in Analysis by an authorized administrator of Digital Commons @ Ursinus College. For more information, please contact [email protected]. The Definite Integrals of Cauchy and Riemann David Ruch∗ August 8, 2020 1 Introduction Rigorous attempts to define the definite integral began in earnest in the early 1800s. A major motivation at the time was the search for functions that could be expressed as Fourier series as follows: 1 a0 X f (x) = + (a cos (kw) + b sin (kw)) where the coefficients are: (1) 2 k k k=1 1 Z π 1 Z π 1 Z π a0 = f (t) dt; ak = f (t) cos (kt) dt ; bk = f (t) sin (kt) dt. 2π −π π −π π −π P k Expanding a function as an infinite series like this may remind you of Taylor series ckx from introductory calculus, except that the Fourier coefficients ak; bk are defined by definite integrals and sine and cosine functions are used instead of powers of x. -

Generalizations of the Riemann Integral: an Investigation of the Henstock Integral
Generalizations of the Riemann Integral: An Investigation of the Henstock Integral Jonathan Wells May 15, 2011 Abstract The Henstock integral, a generalization of the Riemann integral that makes use of the δ-fine tagged partition, is studied. We first consider Lebesgue’s Criterion for Riemann Integrability, which states that a func- tion is Riemann integrable if and only if it is bounded and continuous almost everywhere, before investigating several theoretical shortcomings of the Riemann integral. Despite the inverse relationship between integra- tion and differentiation given by the Fundamental Theorem of Calculus, we find that not every derivative is Riemann integrable. We also find that the strong condition of uniform convergence must be applied to guarantee that the limit of a sequence of Riemann integrable functions remains in- tegrable. However, by slightly altering the way that tagged partitions are formed, we are able to construct a definition for the integral that allows for the integration of a much wider class of functions. We investigate sev- eral properties of this generalized Riemann integral. We also demonstrate that every derivative is Henstock integrable, and that the much looser requirements of the Monotone Convergence Theorem guarantee that the limit of a sequence of Henstock integrable functions is integrable. This paper is written without the use of Lebesgue measure theory. Acknowledgements I would like to thank Professor Patrick Keef and Professor Russell Gordon for their advice and guidance through this project. I would also like to acknowledge Kathryn Barich and Kailey Bolles for their assistance in the editing process. Introduction As the workhorse of modern analysis, the integral is without question one of the most familiar pieces of the calculus sequence. -

Worked Examples on Using the Riemann Integral and the Fundamental of Calculus for Integration Over a Polygonal Element Sulaiman Abo Diab
Worked Examples on Using the Riemann Integral and the Fundamental of Calculus for Integration over a Polygonal Element Sulaiman Abo Diab To cite this version: Sulaiman Abo Diab. Worked Examples on Using the Riemann Integral and the Fundamental of Calculus for Integration over a Polygonal Element. 2019. hal-02306578v1 HAL Id: hal-02306578 https://hal.archives-ouvertes.fr/hal-02306578v1 Preprint submitted on 6 Oct 2019 (v1), last revised 5 Nov 2019 (v2) HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Worked Examples on Using the Riemann Integral and the Fundamental of Calculus for Integration over a Polygonal Element Sulaiman Abo Diab Faculty of Civil Engineering, Tishreen University, Lattakia, Syria [email protected] Abstracts: In this paper, the Riemann integral and the fundamental of calculus will be used to perform double integrals on polygonal domain surrounded by closed curves. In this context, the double integral with two variables over the domain is transformed into sequences of single integrals with one variable of its primitive. The sequence is arranged anti clockwise starting from the minimum value of the variable of integration. Finally, the integration over the closed curve of the domain is performed using only one variable. -

Calculus Terminology
AP Calculus BC Calculus Terminology Absolute Convergence Asymptote Continued Sum Absolute Maximum Average Rate of Change Continuous Function Absolute Minimum Average Value of a Function Continuously Differentiable Function Absolutely Convergent Axis of Rotation Converge Acceleration Boundary Value Problem Converge Absolutely Alternating Series Bounded Function Converge Conditionally Alternating Series Remainder Bounded Sequence Convergence Tests Alternating Series Test Bounds of Integration Convergent Sequence Analytic Methods Calculus Convergent Series Annulus Cartesian Form Critical Number Antiderivative of a Function Cavalieri’s Principle Critical Point Approximation by Differentials Center of Mass Formula Critical Value Arc Length of a Curve Centroid Curly d Area below a Curve Chain Rule Curve Area between Curves Comparison Test Curve Sketching Area of an Ellipse Concave Cusp Area of a Parabolic Segment Concave Down Cylindrical Shell Method Area under a Curve Concave Up Decreasing Function Area Using Parametric Equations Conditional Convergence Definite Integral Area Using Polar Coordinates Constant Term Definite Integral Rules Degenerate Divergent Series Function Operations Del Operator e Fundamental Theorem of Calculus Deleted Neighborhood Ellipsoid GLB Derivative End Behavior Global Maximum Derivative of a Power Series Essential Discontinuity Global Minimum Derivative Rules Explicit Differentiation Golden Spiral Difference Quotient Explicit Function Graphic Methods Differentiable Exponential Decay Greatest Lower Bound Differential -
Lecture 15-16 : Riemann Integration Integration Is Concerned with the Problem of finding the Area of a Region Under a Curve
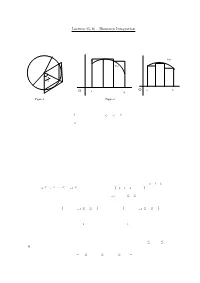
1 Lecture 15-16 : Riemann Integration Integration is concerned with the problem of ¯nding the area of a region under a curve. Let us start with a simple problem : Find the area A of the region enclosed by a circle of radius r. For an arbitrary n, consider the n equal inscribed and superscibed triangles as shown in Figure 1. f(x) f(x) π 2 n O a b O a b Figure 1 Figure 2 Since A is between the total areas of the inscribed and superscribed triangles, we have nr2sin(¼=n)cos(¼=n) · A · nr2tan(¼=n): By sandwich theorem, A = ¼r2: We will use this idea to de¯ne and evaluate the area of the region under a graph of a function. Suppose f is a non-negative function de¯ned on the interval [a; b]: We ¯rst subdivide the interval into a ¯nite number of subintervals. Then we squeeze the area of the region under the graph of f between the areas of the inscribed and superscribed rectangles constructed over the subintervals as shown in Figure 2. If the total areas of the inscribed and superscribed rectangles converge to the same limit as we make the partition of [a; b] ¯ner and ¯ner then the area of the region under the graph of f can be de¯ned as this limit and f is said to be integrable. Let us de¯ne whatever has been explained above formally. The Riemann Integral Let [a; b] be a given interval. A partition P of [a; b] is a ¯nite set of points x0; x1; x2; : : : ; xn such that a = x0 · x1 · ¢ ¢ ¢ · xn¡1 · xn = b.