Performance Evaluation of the Umtrl Tirewheel Uniformity Test Machine
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Information on Tire Radial Force Variation (RFV)
Information on Tire Radial Force Variation (RFV) 2019 and Prior GM Passenger Cars and Light Duty Trucks This Bulletin also applies to any of the above models that may be Export from North America vehicles. This Bulletin has been revised to add the 2018 and 2019 Model Year. Please discard Corporate Bulletin Number 00-03-10-006M. Important Before measuring tires on GM approved tire force variation measurement equipment, the vehicle MUST be driven a minimum of 24 km (15 mi) to ensure removal of any flat-spotting. Refer to the latest version of Corporate Bulletin Number 03-03-10-007: Tire/Wheel Characteristics of GM Original Equipment Tires. GM approved tire force variation measurement equipment MUST be calibrated prior to measuring tire/wheel assemblies for each vehicle. Note If the equipment being used is capable of performing a centering check, the centering check must be completed before taking measurements of balance or RFV. The purpose of this bulletin is to provide guidance to GM dealers when using GM approved tire force variation measurement equipment. This type of equipment can be a valuable tool in diagnosing vehicle ride concerns. The most common ride concern involving tire radial force variation is highway speed (105-115 km/h (65-70 mph) shake on smooth roads. Tire related smooth road highway speed shake can be caused by three conditions: imbalance, out of round and tire force variation. These three conditions are not necessarily related. All three conditions must be addressed. Imbalance is normally addressed first, because it is the simplest of the three to correct. -
Tire Building Drum Having Independently Expandable Center and End Sections
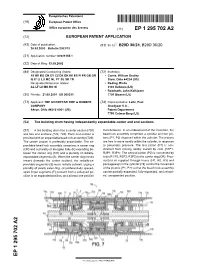
Europäisches Patentamt *EP001295702A2* (19) European Patent Office Office européen des brevets (11) EP 1 295 702 A2 (12) EUROPEAN PATENT APPLICATION (43) Date of publication: (51) Int Cl.7: B29D 30/24, B29D 30/20 26.03.2003 Bulletin 2003/13 (21) Application number: 02021255.1 (22) Date of filing: 19.09.2002 (84) Designated Contracting States: (72) Inventors: AT BE BG CH CY CZ DE DK EE ES FI FR GB GR • Currie, William Dudley IE IT LI LU MC NL PT SE SK TR Stow, Ohio 44224 (US) Designated Extension States: • Reding, Emile AL LT LV MK RO SI 9163 Kehmen (LU) • Roedseth, John Kolbjoern (30) Priority: 21.09.2001 US 960211 7790 Bissen (LU) (71) Applicant: THE GOODYEAR TIRE & RUBBER (74) Representative: Leitz, Paul COMPANY Goodyear S.A., Akron, Ohio 44316-0001 (US) Patent-Department 7750 Colmar-Berg (LU) (54) Tire building drum having independently expandable center and end sections (57) A tire building drum has a center section (720) therebetween. In an embodiment of the invention, the and two end sections (722, 724). Each end section is bead lock assembly comprises a cylinder and two pis- provided with an expandable bead lock assembly (726). tons (P1, P2) disposed within the cylinder. The pistons The center section is preferably expandable. The ex- are free to move axially within the cylinder, in response pandable bead lock assembly comprises a carrier ring to pneumatic pressure. The first piston (P1) is con- (CR) and a plurality of elongate links (K) extending be- strained from moving axially inward by rods (R1P1, tween the carrier ring (CR) and a plurality of radially- R2P1, R3P1). -

May-2017 Subject: Information on Hunter Road Force Balancer
Bulletin No.: 17-NA-170 Date: May-2017 Subject: Information on Hunter Road Force Balancer Brand: Model: Model Year: VIN: Engine: Transmission: from to from to All GM Passenger 2000 2018 Cars and Light Duty Trucks Involved Region or Country North America and N.A. Export Regions Information Effective February 2017, a Generation 3, 4 or 5 Hunter Road Force Balancer is designated as Essential Dealer Equipment in the United States. No other wheel balancer will be considered an acceptable substitute in GM Dealers. The Hunter Road Force Balancer allows technicians to perform a static balance and to check Road Force during a single measurement. With the use of the Hunter Road Force balancer, technicians can be sure that the tire/wheel assembly meets or exceeds GM specifications prior to mounting the assembly back onto the vehicle. This ensures that problem(s) can be corrected early in the process. This prevents repeat repairs and customer dissatisfaction in ride quality. Hunter Generation 3, 4 and 5 Balancers The Hunter Road Force Balancer was developed over 17 years ago. Currently, the Generation 5 is the latest version available. Any dealer having a Generation 3, 4 or 5 balancer, meets the GM requirements. Generation 1 and 2 balancers are not capable of properly measuring and correcting all GM assemblies. Header Header Header Header GSP9722 Up to 8 Years Old 180 Match Mount process (Generation 3) available Ability to Measure and Correct up to 22” assemblies 1 Road Force Touch Up to 3 Years Old Introduces Touch Screen (Generation 4) 180 Match -

Influência Da Estrutura Ímpar Em Pneus De Lonas Cruzadas
Igor Zucato Influência da estrutura ímpar em pneus de lonas cruzadas (“Cross-Ply”) São Paulo 2006 Livros Grátis http://www.livrosgratis.com.br Milhares de livros grátis para download. Igor Zucato Influência da estrutura ímpar em pneus de lonas cruzadas (“Cross-Ply”) Dissertação apresentada à Escola Politécnica da Universidade de São Paulo para obtenção do título de Mestre em Engenharia Mecânica. Orientador: Prof. Dr. Marco Stipkovic Fº. São Paulo 2006 II Folha de Aprovação Igor Zucato Influência da estrutura ímpar em pneus lonas cruzadas (“Cross-Ply”) Dissertação apresentada à Escola Politécnica da Universidade de São Paulo para obtenção do título de Mestre em Engenharia Mecânica. Aprovado em: 21 de novembro de 2006 Banca Examinadora Prof. Dr. Marco Stipkovic Filho Instituição: EP – USP Assinatura :__________________ Prof. Dr. Gilberto Francisco Martha de Souza Instituição: EP – USP Assinatura :__________________ Prof. Dr. Renato Barbieri Instituição: PUC – PR (externo) Assinatura :__________________ III "Nosso maior desejo na vida é encontrar alguém que nos faça fazer o melhor que pudermos." Ralph Waldo Emerson Fabiana, obrigado minha esposa e companheira, com todo o amor de minha vida. IV Agradecimentos Primeiramente ao meu amigo e por acaso meu chefe, Eduardo Pinheiro, que me incentivou e apostou no desenvolvimento desse trabalho com suas sugestões e opiniões, bem como no desenvolvimento desta pós-graduação. Ao meu orientador e amigo que teve a paciência para suportar, guiar e me ajudar durante essa caminhada. À Pirelli Pneus S.A. pelo apoio e oportunidade de desenvolver e publicar este trabalho que reúne uma parte da minha experiência na área de pesquisa e desenvolvimento de pneus, e pelo suporte do R&D. -
Program & Abstracts
39th Annual Business Meeting and Conference on Tire Science and Technology Intelligent Transportation Program and Abstracts September 28th – October 2nd, 2020 Thank you to our sponsors! Platinum ZR-Rated Sponsor Gold V-Rated Sponsor Silver H-Rated Sponsor Bronze T-Rated Sponsor Bronze T-Rated Sponsor Media Partners 39th Annual Meeting and Conference on Tire Science and Technology Day 1 – Monday, September 28, 2020 All sessions take place virtually Gerald Potts 8:00 AM Conference Opening President of the Society 8:15 AM Keynote Speaker Intelligent Transportation - Smart Mobility Solutions Chris Helsel, Chief Technical Officer from the Tire Industry Goodyear Tire & Rubber Company Session 1: Simulations and Data Science Tim Davis, Goodyear Tire & Rubber 9:30 AM 1.1 Voxel-based Finite Element Modeling Arnav Sanyal to Predict Tread Stiffness Variation Around Tire Circumference Cooper Tire & Rubber Company 9:55 AM 1.2 Tire Curing Process Analysis Gabriel Geyne through SIGMASOFT Virtual Molding 3dsigma 10:20 AM 1.3 Off-the-Road Tire Performance Evaluation Biswanath Nandi Using High Fidelity Simulations Dassault Systems SIMULIA Corp 10:40 AM Break 10:55 AM 1.4 A Study on Tire Ride Performance Yaswanth Siramdasu using Flexible Ring Models Generated by Virtual Methods Hankook Tire Co. Ltd. 11:20 AM 1.5 Data-Driven Multiscale Science for Tire Compounding Craig Burkhart Goodyear Tire & Rubber Company 11:45 AM 1.6 Development of Geometrically Accurate Finite Element Tire Models Emanuele Grossi for Virtual Prototyping and Durability Investigations Exponent Day 2 – Tuesday, September 29, 2020 8:15 AM Plenary Lecture Giorgio Rizzoni, Director Enhancing Vehicle Fuel Economy through Connectivity and Center for Automotive Research Automation – the NEXTCAR Program The Ohio State University Session 1: Tire Performance Eric Pierce, Smithers 9:30 AM 2.1 Periodic Results Transfer Operations for the Analysis William V. -

What Is Match Mounting?
dding performance vehi- cle owners to your cus- tomer list can give a huge boost to your shop’s bot- tom line. These owners may be demanding—even picky—but they’ll pay well to get the jobA done exactly the way they want it. Some of the most common types of work done on performance vehicles in- volve the wheels and/or tires. The wheels are one of the most visible parts of a vehicle, so any work done on them must be top-notch—meaning clean, pretty and accurate. Custom wheel service can be broken down into two primary topics, essential- ly—tire match mounting and custom wheel handling. Since you’ll never mount a wheel without a tire, we’ll cov- er the ins and outs of tire match mounting first. What Is Match Mounting? Match mounting involves positioning the tire onto the wheel to minimize or eliminate the final combination of radial force variation and/or imbalance (radial force variation is explained later in this article). One match mounting approach involves aligning the tire’s point of maxi- mum radial force variation (its high spot) to the wheel’s radial low spot (where the wheel’s radial runout is the lowest). This is called the Uniformity Method. The other approach involves simply aligning the tire’s lightest balance point to the wheel’s heaviest balance point, called the Weight Method. OE tire suppliers are required to mark a tire’s radial runout high point, and OE wheel makers are required to mark a wheel’s radial runout low point. -

(12) United States Patent (10) Patent No.: US 6,908,587 B1 Balter Et Al
USOO6908587B1 (12) United States Patent (10) Patent No.: US 6,908,587 B1 Balter et al. (45) Date of Patent: Jun. 21, 2005 (54) POST CURE CORRECTION OF TIRE 3,926,704 A 12/1975 Sharp, Jr. UNIFORMITY 3.945,277 A 3/1976 McGehee et al. (75) Inventors: David John Balter, Cuyahoga Falls, (Continued) OH (US); Michael Alois Kolowski, FOREIGN PATENT DOCUMENTS Mogodore, OH (US); Anthony J. Scarpitti,O O Uniontown, OH (US) DE 22596531729614 6/19746/1971 EP O888872 1/1999 (73) Assignee: The Goodyear Tire & Rubber Co., EP 1023987 8/2000 Akron, OH (US) Primary Examiner Mathieu. D. Vargot (*) Notice: Subject to any disclaimer, the term of this (74) Attorney, Agent, or Firm-Howard M. Cohn patent is extended or adjusted under 35 (57) ABSTRACT U.S.C. 154(b) by 538 days. Method and apparatus for post-cure correction (PCC), either (21) Appl. No.: 09/715,384 partial or Substantial, of various tire nonuniformities which have been detected during a tire manufacturing process by a (22) Filed: Nov. 17, 2000 tire uniformity machine (TUM), preferably testing a tire (51) Int. Cl. ................................................ B29C 71/02 which has been nominally cooled down (i.e., nominally (52) U.S. Cl. ...................... 264/501; 264/401; 264/235; completed curing) after removal from a tire curing mold. 264/346; 425/135; 425/446 The method comprises the Steps of: (1) Selecting the tire (58) Field of Search ................................. 264/501, 502 during a tire manufacturing process after the Selected tire has 264/236, 237, 348, 235,340, 346 401. been rejected by a tire uniformity test due to at least one tire 425/5s.1 13 5 445 446: 73/1 46 uniformity defect; (2) providing 360 degree circumferential s s s s tread restraint which holds the tread in an ideal tread shape, (56) References Cited concentric to the axis of rotation and nominally perpendicu lar to the equatorial plane; (3) Sealingly holding the beads U.S. -

Tire - Wikipedia, the Free Encyclopedia
Tire - Wikipedia, the free encyclopedia http://en.wikipedia.org/wiki/Tire Tire From Wikipedia, the free encyclopedia A tire (or tyre ) is a ring-shaped covering that fits around a wheel's rim to protect it and enable better vehicle performance. Most tires, such as those for automobiles and bicycles, provide traction between the vehicle and the road while providing a flexible cushion that absorbs shock. The materials of modern pneumatic tires are synthetic rubber, natural rubber, fabric and wire, along with carbon black and other chemical compounds. They consist of a tread and a body. The tread provides traction while the body provides containment for a quantity of compressed air. Before rubber was developed, the first versions of tires were simply bands of metal that fitted around wooden wheels to prevent wear and tear. Early rubber tires were solid (not pneumatic). Today, the majority of tires are pneumatic inflatable structures, comprising a doughnut-shaped body of cords and wires encased in rubber and generally filled with compressed air to form an inflatable cushion. Pneumatic tires are used on many types of vehicles, including cars, bicycles, motorcycles, trucks, earthmovers, and aircraft. Metal tires are still used on locomotives and railcars, and solid rubber (or Stacked and standing car tires other polymer) tires are still used in various non-automotive applications, such as some casters, carts, lawnmowers, and wheelbarrows. Contents 1 Etymology and spelling 2 History 3 Manufacturing 4 Components 5 Associated components 6 Construction types 7 Specifications 8 Performance characteristics 9 Markings 10 Vehicle applications 11 Sound and vibration characteristics 12 Regulatory bodies 13 Safety 14 Asymmetric tire 15 Other uses 16 See also 17 References 18 External links Etymology and spelling Historically, the proper spelling is "tire" and is of French origin, coming from the word tirer, to pull. -

Relationship of Truck Tire/Wheel Nonuniformities to Cyclic Force C;Eneration
RELATIONSHIP OF TRUCK TIRE/WHEEL NONUNIFORMITIES TO CYCLIC FORCE C;ENERATION Final Report MVMA Project 81162 T.D. Gillesipie April 1984 Trcbaical Roport Documentation Page 1. R-rt No. 2. Covorrmt Accessrm Fk. 3. Rooprmt's Cotoleg No. UMTRI-84-18 I 4. Title ond Subtitle RELATIOSSHIP OF TRUCK TIRE/WHEEL NONUNI- April 1984 FORMITIES TO CYCLIC FORCE GENERATIOK 8. Perkrring Orgmizotion Ropori No. 7. Aumds) UMTRI-84-18 T. D. Gillespie 9. PrhinqOrqcnisotion Nan* md Addtoss The University of Michigan Transportation Research Institute 11. Contrect ot Gront No. 4 2901 Baxter Road MVMA /!I 163 Ann Arbor, Michi~an 48109 13- TIP. of Rmrr md perrod Corerod 12. sponsoring Aqoncy NH md Address Final Motor Vehicle Manufacturers Association 4/79 - 12/82 300 New Center Building Detroit, Michigan 48202 14. bonsortng Agency ~d. 16. Abshoct Nonuniformities in the tirelwheel assemblies of heavy trucks, such as mass imbalance or dimensional runout, add to the ride vibrations on the road at the rotational frequency of the wheel and harmonics thereof. The rela- tionships between nonuniformities in the individual components and the exci- tation forces produced by the overall assembly are largely unknown. An experimental research program was conducted in which nonuniformities in tire and wheel components and the force variations of the overall assembly were measured on a tire uniformity test machine. The testing covered radial and bias-ply truck tires of the tubeless- and tube-type, disc and cast-spoke wheels, single and dual configurations, and variations in load, pressure, and speed. For tires, the various measures of nonuniformities are related to force variations in the radial, lateral, and tractive force directions. -

Pneumatic Radial Tires
Patentamt Europaisches ||| || 1 1| || || || || || || || || || 1 1| (19) J European Patent Office Office europeen des brevets (11) EP 0 940 271 A2 (12) EUROPEAN PATENT APPLICATION (43) Date of publication: (51 ) |nt. CI.6: B60C 11/11, B60C 11/13 08.09.1999 Bulletin 1999/36 // B60C1 13 00 (21) Application number: 99301588.2 (22) Date of filing: 03.03.1999 (84) Designated Contracting States: (72) Inventors: AT BE CH CY DE DK ES Fl FR GB GR IE IT LI LU • Kaneko, Takashi MC NL PT SE Hanno City, Saitama Pref. (JP) Designated Extension States: • Yamaya, Kenjiro AL LT LV MK RO SI Kodaira City, Tokyo (JP) (30) Priority: 04.03.1998 J P 5197998 (74) Representative: Whalley, Kevin MARKS & CLERK, (71) Applicant: 57-60 Lincoln's Inn Fields Bridgestone Corporation London WC2A 3LS (GB) Tokyo (JP) (54) Pneumatic radial tires (57) A pneumatic radial tire comprises a radial car- cass, a belt, and a row of many blocks (5) having differ- FIG. I ent lengths along a circumference of a ground contact region (1) under pitch variation defined in a tread rubber of the tread portion by at least two straight main grooves (2,3) and a plurality of lateral sub-grooves (4) extending between the mutual main grooves at an inclination angle of less than 90° with respect to the circumference of the ground contact region, in which the block row sat- isfies such relationships that an inclination angle cpL of an edge of a long-pitch block is larger than that cps of an edge of a short-pitch block and an inclination angle <xL of each block wall face of a long-pitch block is larger than that <xs of each block wall face of a short-pitch block, and/or further an inclination angle ps of a block wall face of a short-pitch block is larger than that pL of a block wall face of a long-pitch block. -

SB-10089121-2280.Pdf
File in Section: 03 - Suspension Bulletin No.: 00-03-10-006M Service Bulletin Date: July, 2016 INFORMATION Subject: Information on Tire Radial Force Variation (RFV) Models: 2017 and Prior GM Passenger Cars and Light Duty Trucks Attention: This Bulletin also applies to any of the above models that may be Export from North America vehicles. This Bulletin has been revised to add the 2017 Model Year and add a procedure for 180 matching flangeless rims. Please discard Corporate Bulletin Number 00-03-10-006L. Important: Tire and Wheel Diagnosis Before measuring tires on GM approved tire force 1. Set the tire pressure to the placard values. variation measurement equipment, the vehicle 2. With the vehicle raised, ensure the wheels are MUST be driven a minimum of 24 km (15 mi) to centered on the hub by loosening all wheel nuts ensure removal of any flat-spotting. Refer to the and hand-tightening all nuts first by hand while latest version of Corporate Bulletin shaking the wheel, then torque to specifications Number 03-03-10-007: Tire/Wheel Characteristics using a torque wrench, NOT a torque stick. of GM Original Equipment Tires. 3. Visually inspect the tires and the wheels. Inspect • GM approved tire force variation measurement for evidence of the following conditions and correct equipment MUST be calibrated prior to measuring as necessary: tire/wheel assemblies for each vehicle. • Missing balance weights Note: If the equipment being used is capable of performing a centering check, the centering check must • Bent rim flange be completed before taking measurements of balance • Irregular tire wear or RFV. -

Course Outline
AUT 141 (A4) SUSPENSION AND STEERING COURSE DESCRIPTION: Prerequisites: None Corequisites: None This course covers principles of operation, types, and diagnosis/repair of suspension and steering systems to include steering geometry. Topics include manual and power steering systems and standard and electronically controlled suspension and steering systems. Upon completion, students should be able to identify steering and suspension problems, service and repair steering and suspension components, check and adjust alignment angles, and repair and balance tires. Course Hours per Week: Class, 2; Lab Hours, 3; Semester Hours Credits, 3. SAFETY DISCLAIMER: Automotive work presents many hazards. A moment’s carelessness can cause injury to oneself or to others. Such mishaps can occur quickly due, in part, to the nature of the industrial tools used in automotive work. The weight of automobiles and the equipment used to fix them can even cause fatal injuries. Therefore, great care must always be taken in checking out equipment before use, and in using that equipment to work on automobiles. As we work to insure the safety of everyone in the DTCC automotive lab, it is the instructor’s responsibility to introduce students to equipment and to advise them on its safe operation. Those health and safety procedures are also presented in each textbook for each course in the automotive program. Students are responsible for mastery of that safety information. DTCC holds each student in every class responsible for reading and applying all of the information regarding personal and public safety and personal and public health in the required text. While working in the DTCC automotive lab, safety glasses must be worn by everyone.