Download Accepted Manuscriptadobe PDF (619.86
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Professor Bernard (“Bernie”) Roth: a Short Biography
ARTICLE IN PRESS JID: MAMT [m3Gsc; November 30, 2017;1:28 ] Mechanism and Machine Theory 0 0 0 (2017) 1–5 Contents lists available at ScienceDirect Mechanism and Machine Theory journal homepage: www.elsevier.com/locate/mechmachtheory Research paper Professor Bernard (“Bernie”) Roth: A short biography ∗ Gordon R. Pennock a, , Paulo Flores b a School of Mechanical Engineering, Purdue University, West Lafayette 47907, Indiana b MIT-Portugal Program, CMEMS-UMinho, Department of Mechanical Engineering, University of Minho, Campus de Azurém, Guimarães 4804-533, Portugal a r t i c l e i n f o a b s t r a c t Article history: This brief biography is intended to highlight the historical prominence of Professor Bernard Received 14 November 2017 Roth, whose scientific and academic life and contributions are more than well known Accepted 17 November 2017 among the mechanism and machine science community all around the world. Bernie is Available online xxx celebrating his 85th birthday in the spring of 2018. His long and profitable career has been renowned, not only by his large number of achievements and contributions, but also Keywords: Bernard Roth by his sincere dedication to the highest standards of human integrity. Several different Stanford d.school aspects of his life are considered in this work, namely, his education and scientific and 85th birthday academic career, the awards and honors bestowed upon him, and his cooperation with, Contributions and his leadership within, the international community. Preeminence ©2017 Elsevier Ltd. All rights reserved. Biography 1. Education Professor Bernard (“Bernie”) Roth was born in New York City on May 28th, 1933. -

Memorial Tributes: Volume 15
THE NATIONAL ACADEMIES PRESS This PDF is available at http://nap.edu/13160 SHARE Memorial Tributes: Volume 15 DETAILS 444 pages | 6 x 9 | HARDBACK ISBN 978-0-309-21306-6 | DOI 10.17226/13160 CONTRIBUTORS GET THIS BOOK National Academy of Engineering FIND RELATED TITLES Visit the National Academies Press at NAP.edu and login or register to get: – Access to free PDF downloads of thousands of scientific reports – 10% off the price of print titles – Email or social media notifications of new titles related to your interests – Special offers and discounts Distribution, posting, or copying of this PDF is strictly prohibited without written permission of the National Academies Press. (Request Permission) Unless otherwise indicated, all materials in this PDF are copyrighted by the National Academy of Sciences. Copyright © National Academy of Sciences. All rights reserved. Memorial Tributes: Volume 15 Memorial Tributes NATIONAL ACADEMY OF ENGINEERING Copyright National Academy of Sciences. All rights reserved. Memorial Tributes: Volume 15 Copyright National Academy of Sciences. All rights reserved. Memorial Tributes: Volume 15 NATIONAL ACADEMY OF ENGINEERING OF THE UNITED STATES OF AMERICA Memorial Tributes Volume 15 THE NATIONAL ACADEMIES PRESS Washington, D.C. 2011 Copyright National Academy of Sciences. All rights reserved. Memorial Tributes: Volume 15 International Standard Book Number-13: 978-0-309-21306-6 International Standard Book Number-10: 0-309-21306-1 Additional copies of this publication are available from: The National Academies Press 500 Fifth Street, N.W. Lockbox 285 Washington, D.C. 20055 800–624–6242 or 202–334–3313 (in the Washington metropolitan area) http://www.nap.edu Copyright 2011 by the National Academy of Sciences. -
Download Chapter 190KB
Memorial Tributes: Volume 15 Copyright National Academy of Sciences. All rights reserved. Memorial Tributes: Volume 15 FERDINAND FREUDENSTEIN 1926–2006 Elected in 1979 “For leadership and research in kinematics and design of mechanisms.” BY BERNARD ROTH SUBMITTED BY THE NAE HOME SECRETARY FERDINAND FREUDENSTEIN, longtime Columbia University mechanical engineering professor who is considered the father of modern kinematics in America, died on March 30, 2006, at the age of 79. Ferdinand Freudenstein was born into a Jewish family, on May 12, 1926, in Frankfurt am Main, Germany. When Ferdinand was 10 years old, he, his parents, and two sisters fled the Nazis for safety in Holland. In the spring of 1937, after six months in Amsterdam, the family moved to England, where they joined his brother, who was studying there. They lived in London during the Blitz, moved briefly to Cambridge, and then spent several years in Llandudno, North Wales. During this period his father and brother, were sent into exile in Australia, since the British government regarded all adult male German citizens, even victims of Nazi anti-Semitism, as enemy aliens. In 1942, when he was 16 years old, Ferdinand, his mother, and one sister sailed on an old British cargo boat from England to Trinidad. They remained there for six weeks until a distant cousin arranged for their visas to the United States. They arrived in New York harbor in March 1942. Ferdinand had a high school equivalency certificate from Wales and was able to enter college at New York University. He spent two years studying there and then at age 18 joined the U.S. -

Mechanism Design: Enumeration of Kinematic Structures According to Function Lung-Wen Tsai Nonlinear Analysis of Structures M
Mechanism Design Enumeration of Kinematic Structures According to Function Mechanical Engineering Series Frank Kreith - Series Editor Published Titles Entropy Generation Minimization Adrian Bejan Finite Element Method Using MATLAB Young W. Kwon & Hyochoong Bang Fundamentals of Environmental Discharge Modeling Lorin R. Davis Intelligent Transportation Systems: New Principles and Architectures Sumit Ghosh & Tony Lee Mathematical & Physical Modeling of Materials Processing Operations Olusegun Johnson Ileghus, Manabu Iguchi & Walter E. Wahnsiedler Mechanics of Composite Materials Autar K. Kaw Mechanics of Fatigue Vladimir V. Bolotin Mechanism Design: Enumeration of Kinematic Structures According to Function Lung-Wen Tsai Nonlinear Analysis of Structures M. Sathyamoorthy Practical Inverse Analysis in Engineering David M. Trujillo & Henry R. Busby Thermodynamics for Engineers Kau-Fui Wong Viscoelastic Solids Roderic S. Lakes Forthcoming Titles Distributed Generation: The Power Paradigm for the New Millennium Anne-Marie Borbely & Jan F. Kreider Engineering Experimentation Euan Somerscales Energy Audit of Building Systems: An Engineering Approach Moncef Krarti Finite Element Method Using MATLAB, 2nd Edition Young W. Kwon & Hyochoong Bang Introduction Finite Element Method Chandrakant S. Desai & Tribikram Kundu Mechanics of Solids & Shells Gerald Wempner & Demosthenes Talaslidis Principles of Solid Mechanics Rowland Richards, Jr. Mechanism Design Enumeration of Kinematic Structures According to Function Lung-Wen Tsai Presidential Chair Professor Department of Mechanical Engineering Bourns College of Engineering University of California, Riverside CRC Press Boca Raton London New York Washington, D.C. ON THE COVER: A 4-speed automatic transmission. (Courtesy of General Motors, Warren, MI.) Library of Congress Cataloging-in-Publication Data Tsai, Lung-Wen. Mechanism design : enumeration of kinematic structures according to function / Lung-Wen Tsai p. -

Homayoon Beigi Table of Contents
Curriculum Vitæ Homayoon Beigi 49 Bouton Road South Salem, NY 10590 [email protected] http://www.RecoTechnologies.com/beigi +1-914-997-5676 Ext. 201 Table of Contents Red and Blue text elements are hyperlinks (Red: local link Blue: external link) 1. Education 9. Publications 10. Products 2. Employment Books ProductLibraries 3. Computer Skills Book Chapters & Encyclopedias 11. Research Projects 4. Awards and Honors Patents 12. Standards Development 5. Professional Activities Journal Publications 6. ReviewCommittees InvitedTutorials 7. Society Membership Conference Publications 8. Miscellaneous Keynote Speeches Invited Talks and Radio Technical Reports Updated: August 7, 2020 Education Columbia University, New York, NY Feb 1991 Doctor of Engineering Science Defended 9/1990 Major: Mechanical Engineering Thesis: Neural Network Learning and Learning Control Through Optimization Techniques May 1985 Master of Science Major: Mechanical Engineering Kinematics, Dynamics, and Control Systems May 1984 Bachelor of Science Major: Mechanical Engineering Machine Design Return to Table of Contents Employment Recognition Technologies, Inc. Jul. 2003-Present Chief Executive Officer and President Duties: Research and Development of Human Biometric systems and Human Language Technologies. Architecture design and implementation of the research results into practical systems including engines and applications. Consulting: Expert evaluations on legal and forensic cases involving speaker identities and speech related topics for many legal entities and patent agencies. Products: Exclusive design and implementation of several recognition engines, fully developed in-house (containing over 1.5 million lines of original C++ code, written personally over the past 18 years – 12 years of research and development on code which was from 3 years of research at Internet Server Connections, Inc. -

Kehilathjeshurunbulletin © 27 Sivan, 5735 Volume XLII Number 15 June 6, 1975
SUMMER ISSUE KehilathjeshurunBulletin © 27 Sivan, 5735 Volume XLII Number 15 June 6, 1975 RAMAZ LEADS ALL YESHIVOT IN NEW YORK STATE AND NATIONAL ACADEMIC COMPETITION World Zionist Organization Presents School With Shazar Award Two Students Place First and Second in National Bible Contest Johns Hopkins Stern College tively in the National Bible Contest, As the academic year draws to a Michigan SUNY sponsored by the Jewish Agency, the close, we are very proud to inform M.I.T. Syracuse finals for which were held in May. the congregational family that Ramaz N.Y.U. Touro David and Deena scored top honors School, which is sponsored by Congre¬ Pennsylvania Wellesley from among a splendid group of win¬ gation Kehilath Jeshurun, has once Princeton Yale ners from all over the country in the again brought great honors to itself Rochester Yeshiva Junior Division of this contest. and to the Congregation in a wide Rutgers The two winners have been invited variety of educational activities. The to Jerusalem next May as the School, which is completing the 37th Zalman Shazar Educational Award guests of the World Zionist Organization to year of its existence with a record The achievements of the School compete in the International Bible Con¬ enrollment of 703 children from nurs¬ have also been marked this year by test, which will be held in Jerusalem ery through grade 12, continues to two outstanding results in the area of on Israel set the Independence Day 1976. pace for the Yeshiva world in Judaic Studies. The Department of Our heartiest congratulations to General Studies and Judaic Studies. -
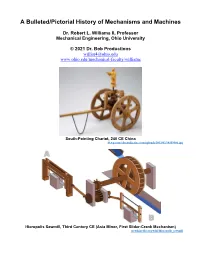
A Bulleted/Pictorial History of Mechanisms and Machines
A Bulleted/Pictorial History of Mechanisms and Machines Dr. Robert L. Williams II, Professor Mechanical Engineering, Ohio University © 2021 Dr. Bob Productions [email protected] www.ohio.edu/mechanical-faculty/williams South-Pointing Chariot, 240 CE China i0.wp.com/cdn.makezine.com/uploads/2013/02/10319906.jpg Hieropolis Sawmill, Third Century CE (Asia Minor, First Slider-Crank Mechanism) en.wikipedia.org/wiki/Hierapolis_sawmill 2 Mechanisms and Machines History, Dr. Bob Table of Contents PROLOGUE .............................................................................................................................................. 3 1. MACHINES AND MECHANISMS ................................................................................................... 4 2. CONCEPTS RELATED TO MACHINES AND MECHANISMS ................................................. 8 3. IMPORTANT DEVELOPERS OF MECHANISM SCIENCE AND ENGINEERING ............. 10 4. LINKAGES, GEARS, AND CAM-FOLLOWER MECHANISMS ............................................. 14 5. SOME SPECIFIC MACHINE AND MECHANISM INVENTIONS IN HISTORY .................. 25 6. IMPORTANT PERSONS IN THE HISTORY OF MECHANISMS ........................................... 38 7. DEFINITIONS ................................................................................................................................... 44 REFERENCES ........................................................................................................................................ 46 © 2021 Dr. Bob Productions 3 -

Ferdinand Freudenstein
GENERAL ARTICLE Ferdinand Freudenstein Bernard Roth The Freudenstein equation, appearing for the first time in the doctoral dissertation of Ferdinand Freudenstein in 1954, is widely acknowledged to be a turning point in modern analyti- cal kinematics. Professor Freudenstein (1926–2006) during his long career at Columbia University, together with his students, made outstanding research contributions in almost Bernard Roth did his all areas of kinematics and mechanisms, and his direct and graduate work at indirect influence can be readily seen in teaching, research Columbia University, and industrial practice in the area of mechanisms and ma- where he was Professor Freudenstein’s second PhD chines. In this article the life and work of Ferdinand graduate. He has had a Freudenstein is revisited. long career as a professor of Mechanical Engineering Introduction at Stanford University. Currently he is the Ferdinand Freudenstein is considered the father of modern kine- Academic Director of the matics in America. He made his mark early in his career with his Hasso Plattner Institue of Design at Stanford, which PhD dissertation in which he developed what is known as is commonly known as ‘the Freudenstein equation. Over a 42-year career as a professor at d.school’. Columbia University in New York City, he and his students produced outstanding research results in many areas of kinemat- ics. Many of his PhD students went on to be distinguished professors at other universities, and they and their students edu- cated several generations of new engineers, researchers and professors. At the time of his death in 2006 there were over 500 academic descendents belonging to the Freudenstein family tree. -
The Fu Foundation School of Engineering and Applied Science
The Fu Foundation School of Engineering and Applied Science 1864–2014 CELEBRATING 150 YEARS OF EXCELLENCE IN EDUCATION, RESEARCH, AND INNOVATION oday, we are in the midst of a global Engineering Renaissance, where engineering solutions are revolutionizing and expanding our ability to provide energy, water, food, shelter, sanitation, mobility, Tmedicine, and communication to the world—transforming modern cities to smart cities, opening up communication channels that connect people in all pockets of the world in ways never anticipated even 10 years ago, and creating novel technologies to enable highly individualized and personalized medicine. In each of these endeavors, and in so many others, The Fu Foundation School of Engineering and Applied Science is at the forefront of bringing creative solutions to some of society’s most intractable problems. This Renaissance moment is placing engineering at the center of pan-disciplinary research and innovation. Engineering has always incorporated developments in other disciplines and today engineering is itself influencing and, indeed, charting a new direction for other disciplines. We cannot think of the future of medicine, journalism, business, policy, science, the social sciences, even the arts and humanities, without considering the role of engineering. From its inception, the faculty and alumni of the Columbia School of Mines and its successor schools have played a pioneering role in defining and advancing academic disciplines; confronting the complexities of society’s greatest challenges; and fostering excellence and leadership in education, research, and innovation. As part of the commemoration of our sesquicentennial, we have selected 150 groundbreaking contributions of our faculty, alumni, and students that illustrate the impact of the School in New Historic photos courtesy of Columbia University Archives or in the public domain unless otherwise noted; York City, in the nation, and in the world. -

Fall 2008.Pub
Fall 2008, Volume 1, Issue 1 Mechanical Engineering Newsletter The Fu Foundation School of Engineering & Applied Science, Columbia University in the City of New York A computer aided design (CAD) model of a dual-arm robot for ophthalmic micro- Micro-scale mechanical testing of nanoporous gold (Au) which has a very surgery (Prof. N. Simaan). high surface area to volume ratio. This makes it well-suited for applications in sensing, actuation and catalysis (Prof. J. Kysar). Message from the Chair In this issue Dear Alumni and Friends, • Message from the Chair These are exciting times for our department. Our undergraduate and graduate programs are vi- • 2008 Graduates brant and expanding, with about 100 undergradu- ates and close to 100 graduate students. Young, • Ph.D. Students Combine Research with dynamic, and talented faculty have joined the Community Service department and brought with them interests and • Formula SAE Club expertise in a variety of new and emerging areas. Research activities and interdisciplinary collabo- • 2008 Senior Dinner rations in particular have been on the rise significantly. • Senior Design This is the inaugural issue of the ME Newsletter. Twice a year, the newsletter will celebrate the recent exciting developments in our de- • FE Exam partment. It will highlight the latest research results, the special recog- • Alumni Highlight: Anna Kazanjian Longo- nitions earned by our students and faculty, and other important activi- bardo and Guy Longobardo ties. This newsletter is also a means of keeping in touch with all our alumni and friends of the department. We love to hear what you are • Class of 2003 Reunion doing (see page 8).