4-Manifolds (Symplectic Or Not)
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Density of Thin Film Billiard Reflection Pseudogroup in Hamiltonian Symplectomorphism Pseudogroup Alexey Glutsyuk
Density of thin film billiard reflection pseudogroup in Hamiltonian symplectomorphism pseudogroup Alexey Glutsyuk To cite this version: Alexey Glutsyuk. Density of thin film billiard reflection pseudogroup in Hamiltonian symplectomor- phism pseudogroup. 2020. hal-03026432v2 HAL Id: hal-03026432 https://hal.archives-ouvertes.fr/hal-03026432v2 Preprint submitted on 6 Dec 2020 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Density of thin film billiard reflection pseudogroup in Hamiltonian symplectomorphism pseudogroup Alexey Glutsyuk∗yzx December 3, 2020 Abstract Reflections from hypersurfaces act by symplectomorphisms on the space of oriented lines with respect to the canonical symplectic form. We consider an arbitrary C1-smooth hypersurface γ ⊂ Rn+1 that is either a global strictly convex closed hypersurface, or a germ of hy- persurface. We deal with the pseudogroup generated by compositional ratios of reflections from γ and of reflections from its small deforma- tions. In the case, when γ is a global convex hypersurface, we show that the latter pseudogroup is dense in the pseudogroup of Hamiltonian diffeomorphisms between subdomains of the phase cylinder: the space of oriented lines intersecting γ transversally. We prove an analogous local result in the case, when γ is a germ. -

Betti Numbers of Finite Volume Orbifolds 10
BETTI NUMBERS OF FINITE VOLUME ORBIFOLDS IDDO SAMET Abstract. We prove that the Betti numbers of a negatively curved orbifold are linearly bounded by its volume, generalizing a theorem of Gromov which establishes this bound for manifolds. An imme- diate corollary is that Betti numbers of a lattice in a rank-one Lie group are linearly bounded by its co-volume. 1. Introduction Let X be a Hadamard manifold, i.e. a connected, simply-connected, complete Riemannian manifold of non-positive curvature normalized such that −1 ≤ K ≤ 0. Let Γ be a discrete subgroup of Isom(X). If Γ is torsion-free then X=Γ is a Riemannian manifold. If Γ has torsion elements, then X=Γ has a structure of an orbifold. In both cases, the Riemannian structure defines the volume of X=Γ. An important special case is that of symmetric spaces X = KnG, where G is a connected semisimple Lie group without center and with no compact factors, and K is a maximal compact subgroup. Then X is non-positively curved, and G is the connected component of Isom(X). In this case, X=Γ has finite volume iff Γ is a lattice in G. The curvature of X is non-positive if rank(G) ≥ 2, and is negative if rank(G) = 1. In many cases, the volume of negatively curved manifold controls the complexity of its topology. A manifestation of this phenomenon is the celebrated theorem of Gromov [3, 10] stating that if X has sectional curvature −1 ≤ K < 0 then Xn (1) bi(X=Γ) ≤ Cn · vol(X=Γ); i=0 where bi are Betti numbers w.r.t. -
![Arxiv:1704.04175V1 [Math.DG] 13 Apr 2017 Umnfls[ Submanifolds Mty[ Ometry Eerhr Ncmlxgoer.I at H Loihshe Algorithms to the Aim Fact, the in with Geometry](https://docslib.b-cdn.net/cover/7376/arxiv-1704-04175v1-math-dg-13-apr-2017-umnfls-submanifolds-mty-ometry-eerhr-ncmlxgoer-i-at-h-loihshe-algorithms-to-the-aim-fact-the-in-with-geometry-47376.webp)
Arxiv:1704.04175V1 [Math.DG] 13 Apr 2017 Umnfls[ Submanifolds Mty[ Ometry Eerhr Ncmlxgoer.I at H Loihshe Algorithms to the Aim Fact, the in with Geometry
SAGEMATH EXPERIMENTS IN DIFFERENTIAL AND COMPLEX GEOMETRY DANIELE ANGELLA Abstract. This note summarizes the talk by the author at the workshop “Geometry and Computer Science” held in Pescara in February 2017. We present how SageMath can help in research in Complex and Differential Geometry, with two simple applications, which are not intended to be original. We consider two "classification problems" on quotients of Lie groups, namely, "computing cohomological invariants" [AFR15, LUV14], and "classifying special geo- metric structures" [ABP17], and we set the problems to be solved with SageMath [S+09]. Introduction Complex Geometry is the study of manifolds locally modelled on the linear complex space Cn. A natural way to construct compact complex manifolds is to study the projective geometry n n+1 n of CP = C 0 /C×. In fact, analytic submanifolds of CP are equivalent to algebraic submanifolds [GAGA\ { }]. On the one side, this means that both algebraic and analytic techniques are available for their study. On the other side, this means also that this class of manifolds is quite restrictive. In particular, they do not suffice to describe some Theoretical Physics models e.g. [Str86]. Since [Thu76], new examples of complex non-projective, even non-Kähler manifolds have been investigated, and many different constructions have been proposed. One would study classes of manifolds whose geometry is, in some sense, combinatorically or alge- braically described, in order to perform explicit computations. In this sense, great interest has been deserved to homogeneous spaces of nilpotent Lie groups, say nilmanifolds, whose ge- ometry [Bel00, FG04] and cohomology [Nom54] is encoded in the Lie algebra. -

Gromov Receives 2009 Abel Prize
Gromov Receives 2009 Abel Prize . The Norwegian Academy of Science Medal (1997), and the Wolf Prize (1993). He is a and Letters has decided to award the foreign member of the U.S. National Academy of Abel Prize for 2009 to the Russian- Sciences and of the American Academy of Arts French mathematician Mikhail L. and Sciences, and a member of the Académie des Gromov for “his revolutionary con- Sciences of France. tributions to geometry”. The Abel Prize recognizes contributions of Citation http://www.abelprisen.no/en/ extraordinary depth and influence Geometry is one of the oldest fields of mathemat- to the mathematical sciences and ics; it has engaged the attention of great mathema- has been awarded annually since ticians through the centuries but has undergone Photo from from Photo 2003. It carries a cash award of revolutionary change during the last fifty years. Mikhail L. Gromov 6,000,000 Norwegian kroner (ap- Mikhail Gromov has led some of the most impor- proximately US$950,000). Gromov tant developments, producing profoundly original will receive the Abel Prize from His Majesty King general ideas, which have resulted in new perspec- Harald at an award ceremony in Oslo, Norway, on tives on geometry and other areas of mathematics. May 19, 2009. Riemannian geometry developed from the study Biographical Sketch of curved surfaces and their higher-dimensional analogues and has found applications, for in- Mikhail Leonidovich Gromov was born on Decem- stance, in the theory of general relativity. Gromov ber 23, 1943, in Boksitogorsk, USSR. He obtained played a decisive role in the creation of modern his master’s degree (1965) and his doctorate (1969) global Riemannian geometry. -

Cusp and B1 Growth for Ball Quotients and Maps Onto Z with Finitely
Cusp and b1 growth for ball quotients and maps onto Z with finitely generated kernel Matthew Stover∗ Temple University [email protected] August 8, 2018 Abstract 2 Let M = B =Γ be a smooth ball quotient of finite volume with first betti number b1(M) and let E(M) ≥ 0 be the number of cusps (i.e., topological ends) of M. We study the growth rates that are possible in towers of finite-sheeted coverings of M. In particular, b1 and E have little to do with one another, in contrast with the well-understood cases of hyperbolic 2- and 3-manifolds. We also discuss growth of b1 for congruence 2 3 arithmetic lattices acting on B and B . Along the way, we provide an explicit example of a lattice in PU(2; 1) admitting a homomorphism onto Z with finitely generated kernel. Moreover, we show that any cocompact arithmetic lattice Γ ⊂ PU(n; 1) of simplest type contains a finite index subgroup with this property. 1 Introduction Let Bn be the unit ball in Cn with its Bergman metric and Γ be a torsion-free group of isometries acting discretely with finite covolume. Then M = Bn=Γ is a manifold with a finite number E(M) ≥ 0 of cusps. Let b1(M) = dim H1(M; Q) be the first betti number of M. One purpose of this paper is to describe possible behavior of E and b1 in towers of finite-sheeted coverings. Our examples are closely related to the ball quotients constructed by Hirzebruch [25] and Deligne{ Mostow [17, 38]. -

Symplectic Structures on Gauge Theory?
Commun. Math. Phys. 193, 47 – 67 (1998) Communications in Mathematical Physics c Springer-Verlag 1998 Symplectic Structures on Gauge Theory? Nai-Chung Conan Leung School of Mathematics, 127 Vincent Hall, University of Minnesota, Minneapolis, MN 55455, USA Received: 27 February 1996 / Accepted: 7 July 1997 [ ] Abstract: We study certain natural differential forms ∗ and their equivariant ex- tensions on the space of connections. These forms are defined usingG the family local index theorem. When the base manifold is symplectic, they define a family of sym- plectic forms on the space of connections. We will explain their relationships with the Einstein metric and the stability of vector bundles. These forms also determine primary and secondary characteristic forms (and their higher level generalizations). Contents 1 Introduction ............................................... 47 2 Higher Index of the Universal Family ........................... 49 2.1 Dirac operators ............................................. 50 2.2 ∂-operator ................................................ 52 3 Moment Map and Stable Bundles .............................. 53 4 Space of Generalized Connections ............................. 58 5 Higer Level Chern–Simons Forms ............................. 60 [ ] 6 Equivariant Extensions of ∗ ................................ 63 1. Introduction In this paper, we study natural differential forms [2k] on the space of connections on a vector bundle E over X, A i [2k] FA (A)(B1,B2,...,B2 )= Tr[e 2π B1B2 B2 ] Aˆ(X). k ··· k sym ZX They are invariant closed differential forms on . They are introduced as the family local indexG for universal family of operators. A ? This research is supported by NSF grant number: DMS-9114456 48 N-C. C. Leung We use them to define higher Chern-Simons forms of E: [ ] ch(E; A0,...,A )=∗ L(A0,...,A ), l l ◦ l l and discuss their properties. -

On the Betti Numbers of Real Varieties
ON THE BETTI NUMBERS OF REAL VARIETIES J. MILNOR The object of this note will be to give an upper bound for the sum of the Betti numbers of a real affine algebraic variety. (Added in proof. Similar results have been obtained by R. Thom [lO].) Let F be a variety in the real Cartesian space Rm, defined by poly- nomial equations /i(xi, ■ ■ ■ , xm) = 0, ■ • • , fP(xx, ■ ■ ■ , xm) = 0. The qth Betti number of V will mean the rank of the Cech cohomology group Hq(V), using coefficients in some fixed field F. Theorem 2. If each polynomial f, has degree S k, then the sum of the Betti numbers of V is ^k(2k —l)m-1. Analogous statements for complex and/or projective varieties will be given at the end. I wish to thank W. May for suggesting this problem to me. Remark A. This is certainly not a best possible estimate. (Compare Remark B.) In the examples which I know, the sum of the Betti numbers of V is always 5=km. Consider for example the m polynomials fi(xx, ■ ■ ■ , xm) = (xi - l)(xi - 2) • • • (xi - k), where i=l, 2, • ■ • , m. These define a zero-dimensional variety, con- sisting of precisely km points. The proofs of Theorem 2 and of Theorem 1 (which will be stated later) depend on the following. Lemma 1. Let V~oERm be a zero-dimensional variety defined by poly- nomial equations fx = 0, ■ • • , fm = 0. Suppose that the gradient vectors dfx, • • • , dfm are linearly independent at each point of Vo- Then the number of points in V0 is at most equal to the product (deg fi) (deg f2) ■ ■ ■ (deg/m). -

Lecture 1: Basic Concepts, Problems, and Examples
LECTURE 1: BASIC CONCEPTS, PROBLEMS, AND EXAMPLES WEIMIN CHEN, UMASS, SPRING 07 In this lecture we give a general introduction to the basic concepts and some of the fundamental problems in symplectic geometry/topology, where along the way various examples are also given for the purpose of illustration. We will often give statements without proofs, which means that their proof is either beyond the scope of this course or will be treated more systematically in later lectures. 1. Symplectic Manifolds Throughout we will assume that M is a C1-smooth manifold without boundary (unless specific mention is made to the contrary). Very often, M will also be closed (i.e., compact). Definition 1.1. A symplectic structure on a smooth manifold M is a 2-form ! 2 Ω2(M), which is (1) nondegenerate, and (2) closed (i.e. d! = 0). (Recall that a 2-form ! 2 Ω2(M) is said to be nondegenerate if for every point p 2 M, !(u; v) = 0 for all u 2 TpM implies v 2 TpM equals 0.) The pair (M; !) is called a symplectic manifold. Before we discuss examples of symplectic manifolds, we shall first derive some im- mediate consequences of a symplectic structure. (1) The nondegeneracy condition on ! is equivalent to the condition that M has an even dimension 2n and the top wedge product !n ≡ ! ^ ! · · · ^ ! is nowhere vanishing on M, i.e., !n is a volume form. In particular, M must be orientable, and is canonically oriented by !n. The nondegeneracy condition is also equivalent to the condition that M is almost complex, i.e., there exists an endomorphism J of TM such that J 2 = −Id. -
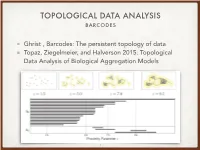
Topological Data Analysis of Biological Aggregation Models
TOPOLOGICAL DATA ANALYSIS BARCODES Ghrist , Barcodes: The persistent topology of data Topaz, Ziegelmeier, and Halverson 2015: Topological Data Analysis of Biological Aggregation Models 1 Questions in data analysis: • How to infer high dimensional structure from low dimensional representations? • How to assemble discrete points into global structures? 2 Themes in topological data analysis1 : 1. Replace a set of data points with a family of simplicial complexes, indexed by a proximity parameter. 2. View these topological complexes using the novel theory of persistent homology. 3. Encode the persistent homology of a data set as a parameterized version of a Betti number (a barcode). 1Work of Carlsson, de Silva, Edelsbrunner, Harer, Zomorodian 3 CLOUDS OF DATA Point cloud data coming from physical objects in 3-d 4 CLOUDS TO COMPLEXES Cech Rips complex complex 5 CHOICE OF PARAMETER ✏ ? USE PERSISTENT HOMOLOGY APPLICATION (TOPAZ ET AL.): BIOLOGICAL AGGREGATION MODELS Use two math models of biological aggregation (bird flocks, fish schools, etc.): Vicsek et al., D’Orsogna et al. Generate point clouds in position-velocity space at different times. Analyze the topological structure of these point clouds by calculating the first few Betti numbers. Visualize of Betti numbers using contours plots. Compare results to other measures/parameters used to quantify global behavior of aggregations. TDA AND PERSISTENT HOMOLOGY FORMING A SIMPLICIAL COMPLEX k-simplices • 1-simplex (edge): 2 points are within ✏ of each other. • 2-simplex (triangle): 3 points are pairwise within ✏ from each other EXAMPLE OF A VIETORIS-RIPS COMPLEX HOMOLOGY BOUNDARIES For k 0, create an abstract vector space C with basis consisting of the ≥ k set of k-simplices in S✏. -

Symplectic Geometry
Vorlesung aus dem Sommersemester 2013 Symplectic Geometry Prof. Dr. Fabian Ziltener TEXed by Viktor Kleen & Florian Stecker Contents 1 From Classical Mechanics to Symplectic Topology2 1.1 Introducing Symplectic Forms.........................2 1.2 Hamiltonian mechanics.............................2 1.3 Overview over some topics of this course...................3 1.4 Overview over some current questions....................4 2 Linear (pre-)symplectic geometry6 2.1 (Pre-)symplectic vector spaces and linear (pre-)symplectic maps......6 2.2 (Co-)isotropic and Lagrangian subspaces and the linear Weinstein Theorem 13 2.3 Linear symplectic reduction.......................... 16 2.4 Linear complex structures and the symplectic linear group......... 17 3 Symplectic Manifolds 26 3.1 Definition, Examples, Contangent bundle.................. 26 3.2 Classical Mechanics............................... 28 3.3 Symplectomorphisms, Hamiltonian diffeomorphisms and Poisson brackets 35 3.4 Darboux’ Theorem and Moser isotopy.................... 40 3.5 Symplectic, (co-)isotropic and Lagrangian submanifolds.......... 44 3.6 Symplectic and Hamiltonian Lie group actions, momentum maps, Marsden– Weinstein quotients............................... 48 3.7 Physical motivation: Symmetries of mechanical systems and Noether’s principle..................................... 52 3.8 Symplectic Quotients.............................. 53 1 From Classical Mechanics to Symplectic Topology 1.1 Introducing Symplectic Forms Definition 1.1. A symplectic form is a non–degenerate and closed 2–form on a manifold. Non–degeneracy means that if ωx(v, w) = 0 for all w ∈ TxM, then v = 0. Closed means that dω = 0. Reminder. A differential k–form on a manifold M is a family of skew–symmetric k– linear maps ×k (ωx : TxM → R)x∈M , which depends smoothly on x. 2n Definition 1.2. We define the standard symplectic form ω0 on R as follows: We 2n 2n 2n 2n identify the tangent space TxR with the vector space R . -

Complex Cobordism and Almost Complex Fillings of Contact Manifolds
MSci Project in Mathematics COMPLEX COBORDISM AND ALMOST COMPLEX FILLINGS OF CONTACT MANIFOLDS November 2, 2016 Naomi L. Kraushar supervised by Dr C Wendl University College London Abstract An important problem in contact and symplectic topology is the question of which contact manifolds are symplectically fillable, in other words, which contact manifolds are the boundaries of symplectic manifolds, such that the symplectic structure is consistent, in some sense, with the given contact struc- ture on the boundary. The homotopy data on the tangent bundles involved in this question is finding an almost complex filling of almost contact manifolds. It is known that such fillings exist, so that there are no obstructions on the tangent bundles to the existence of symplectic fillings of contact manifolds; however, so far a formal proof of this fact has not been written down. In this paper, we prove this statement. We use cobordism theory to deal with the stable part of the homotopy obstruction, and then use obstruction theory, and a variant on surgery theory known as contact surgery, to deal with the unstable part of the obstruction. Contents 1 Introduction 2 2 Vector spaces and vector bundles 4 2.1 Complex vector spaces . .4 2.2 Symplectic vector spaces . .7 2.3 Vector bundles . 13 3 Contact manifolds 19 3.1 Contact manifolds . 19 3.2 Submanifolds of contact manifolds . 23 3.3 Complex, almost complex, and stably complex manifolds . 25 4 Universal bundles and classifying spaces 30 4.1 Universal bundles . 30 4.2 Universal bundles for O(n) and U(n).............. 33 4.3 Stable vector bundles . -

“Generalized Complex and Holomorphic Poisson Geometry”
“Generalized complex and holomorphic Poisson geometry” Marco Gualtieri (University of Toronto), Ruxandra Moraru (University of Waterloo), Nigel Hitchin (Oxford University), Jacques Hurtubise (McGill University), Henrique Bursztyn (IMPA), Gil Cavalcanti (Utrecht University) Sunday, 11-04-2010 to Friday, 16-04-2010 1 Overview of the Field Generalized complex geometry is a relatively new subject in differential geometry, originating in 2001 with the work of Hitchin on geometries defined by differential forms of mixed degree. It has the particularly inter- esting feature that it interpolates between two very classical areas in geometry: complex algebraic geometry on the one hand, and symplectic geometry on the other hand. As such, it has bearing on some of the most intriguing geometrical problems of the last few decades, namely the suggestion by physicists that a duality of quantum field theories leads to a ”mirror symmetry” between complex and symplectic geometry. Examples of generalized complex manifolds include complex and symplectic manifolds; these are at op- posite extremes of the spectrum of possibilities. Because of this fact, there are many connections between the subject and existing work on complex and symplectic geometry. More intriguing is the fact that complex and symplectic methods often apply, with subtle modifications, to the study of the intermediate cases. Un- like symplectic or complex geometry, the local behaviour of a generalized complex manifold is not uniform. Indeed, its local structure is characterized by a Poisson bracket, whose rank at any given point characterizes the local geometry. For this reason, the study of Poisson structures is central to the understanding of gen- eralized complex manifolds which are neither complex nor symplectic.