Technical Design Report Transition Radiation Detector
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Cherenkov Radiation
TheThe CherenkovCherenkov effecteffect A charged particle traveling in a dielectric medium with n>1 radiates Cherenkov radiation B Wave front if its velocity is larger than the C phase velocity of light v>c/n or > 1/n (threshold) A β Charged particle The emission is due to an asymmetric polarization of the medium in front and at the rear of the particle, giving rise to a varying electric dipole momentum. dN Some of the particle energy is convertedγ = 491into light. A coherent wave front is dx generated moving at velocity v at an angle Θc If the media is transparent the Cherenkov light can be detected. If the particle is ultra-relativistic β~1 Θc = const and has max value c t AB n 1 cosθc = = = In water Θc = 43˚, in ice 41AC˚ βct βn 37 TheThe CherenkovCherenkov effecteffect The intensity of the Cherenkov radiation (number of photons per unit length of particle path and per unit of wave length) 2 2 2 2 2 Number of photons/L and radiation d N 4π z e 1 2πz 2 = 2 1 − 2 2 = 2 α sin ΘC Wavelength depends on charge dxdλ hcλ n β λ and velocity of particle 2πe2 α = Since the intensity is proportional to hc 1/λ2 short wavelengths dominate dN Using light detectors (photomultipliers)γ = sensitive491 in 400-700 nm for an ideally 100% efficient detector in the visibledx € 2 dNγ λ2 d Nγ 2 2 λ2 dλ 2 2 11 1 22 2 d 2 z sin 2 z sin 490393 zz sinsinΘc photons / cm = ∫ λ = π α ΘC ∫ 2 = π α ΘC 2 −− 2 = α ΘC λ1 λ1 dx dxdλ λ λλ1 λ2 d 2 N d 2 N dλ λ2 d 2 N = = dxdE dxdλ dE 2πhc dxdλ Energy loss is about 104 less hc 2πhc than 2 MeV/cm in water from € -

Transition and Diffraction Radiation by Relativistic Electrons in a Pre-Wave Zone
Proceedings of EPAC 2002, Paris, France TRANSITION AND DIFFRACTION RADIATION BY RELATIVISTIC ELECTRONS IN A PRE-WAVE ZONE S.N. Dobrovolsky, N.F. Shul'ga, NSC “KIPT”, Kharkov, Ukraine Abstract depended on the transversal size of target in the The long-wavelength transition radiation from the millimeter and submillimeter waverange. ultrarelativistic bunched electrons on the thin metallic The sufficiently different situation can happen when we transverse-limited target has been considered. We have have small detector, which is placed not far from the investigated the properties of transition radiation and target. Because the transition radiation is formed on the whole electromagnetic energy flux in a pre-wave zone. target's surface, the effect of interference between The general formula for spectral-angular density of radiation from various elementary radiators is possible. electromagnetic energy flux through the small-size Therefore, the conditions of near-field and far-field detector in the "forward" and "backward" direction is radiation will be determined by diameter of extended obtained and analysed. We have showed that the angular source of radiation. The longitudinal length of near-field distribution of electromagnetic energy flux in the "pre- radiation region has the same value as "coherent length'' wave zone" is strongly distorted in comparison to the case in the "forward” direction. But this interference effect will of transverse-unlimited detector. occur even for "backward" transition radiation alone. Longitudinal size of near-field region for "backward" 1 INTRODUCTION direction will be much larger, than "backward coherent length", which has size nearly λ . The investigation of The long-wavelength transition radiation by relativistic such effect in the case of infinite target was performed electrons has various applications in the modern physics recently for "backward" radiation in small-angle of accelerated particles. -

Radiation by Charged Particles: a Review Contents F.Sannibale Contents
RadiationRadiation byby ChargedCharged Particles:Particles: aa ReviewReview Fernando Sannibale 1 Accelerator-Based Sources of Coherent Terahertz Radiation – UCSC, Santa Rosa CA, January 21-25, 2008 Radiation by Charged Particles: a Review Contents F.Sannibale Contents • Introduction • The Lienard-Wiechert Potentials • Photon and Particle Optics • The Weizsäcker-Williams Approach Applied to Radiation from Charged Particles • Incoherent and Coherent Radiation 2 Accelerator-Based Sources of Coherent Terahertz Radiation – UCSC, Santa Rosa CA, January 21-25, 2008 Radiation by Charged Particles: a Review Introduction F.Sannibale Introduction The scope of this lecture is to give a quick review of the physics of radiation from charged particles. A basic knowledge of electromagnetism laws is assumed. The classical approach is briefly described, main formulas are given but generally not derived. The detailed derivation can be found in any classical electrodynamics book and it is beyond the scope of this course. A semi-classical approach by Max Zolotorev is also presented that gives an "intuitive" view of the radiation process. 3 Accelerator-Based Sources of Coherent Terahertz Radiation – UCSC, Santa Rosa CA, January 21-25, 2008 Radiation by Charged TheThe FieldField ofof aa MovingMoving Particles: a Review F.Sannibale ChargedCharged ParticleParticle A particle with charge q is moving along the trajectory r' (t), the vector r defines the observation point P. R = r - r' is the vector with magnitude equal to the distance between the particle and the -

Development of Transition Radiation Detectors for Hadron Identification
4th International Conference on Particle Physics and Astrophysics (ICPPA-2018) IOP Publishing Journal of Physics: Conference Series 1390 (2019) 012126 doi:10.1088/1742-6596/1390/1/012126 Development of Transition Radiation Detectors for hadron identification at TeV energy scale N Belyaev1, M L Cherry2, F Dachs3,4, S A Doronin1,7, K Filippov1,7, P Fusco5,6, F Gargano6, S Konovalov7, F Loparco5,6, V Mascagna8,9, M N Mazziotta6, D Ponomarenko1, M Prest8,9, D Pyatiizbyantseva1, C Rembser3, A Romaniouk1, A A Savchenko1,10, E J Schioppa3, D Yu Sergeeva1,10, E Shulga1, S Smirnov1, Yu Smirnov1, M Soldani8,9, P Spinelli5,6, M Strikhanov1, P Teterin1, V Tikhomirov1,7, A A Tishchenko1,10, E Vallazza11, K Vorobev1 and K Zhukov7 1 National Research Nuclear University MEPhI (Moscow Engineering Physics Institute), Kashirskoe highway 31, Moscow, 115409, Russia 2 Dept. of Physics & Astronomy, Louisiana State University, Baton Rouge, LA 70803 USA 3 CERN, the European Organization for Nuclear Research, Espl. des Particules 1, 1211 Geneva, Switzerland 4 Technical University of Vienna, Karlsplatz 13, 1040 Vienna, Austria 5 Dipartimento di Fisica “M. Merlin” dell' Universit`ae del Politecnico di Bari, I-70126 Bari, Italy 6 Istituto Nazionale di Fisica Nucleare, Sezione di Bari, I-70126 Bari, Italy 7 P. N. Lebedev Physical Institute of the Russian Academy of Sciences, Leninsky prospect 53, Moscow, 119991, Russia 8 INFN Milano Bicocca, Piazza della Scienza 3, 20126 Milano, Italy 9 Universit`adegli Studi dell'Insubria, Via Valleggio 11, 22100, Como, Italy 10 National Research Center Kurchatov Institute, Akademika Kurchatova pl. 1, Moscow, 123182, Russia 11 INFN Trieste, Padriciano 99, 34149 Trieste, Italy E-mail: [email protected] Abstract. -
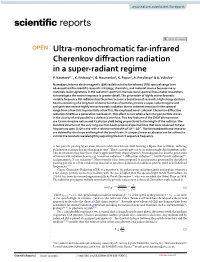
Ultra-Monochromatic Far-Infrared Cherenkov Diffraction Radiation in A
www.nature.com/scientificreports OPEN Ultra‑monochromatic far‑infrared Cherenkov difraction radiation in a super‑radiant regime P. Karataev1*, K. Fedorov1,2, G. Naumenko2, K. Popov2, A. Potylitsyn2 & A. Vukolov2 Nowadays, intense electromagnetic (EM) radiation in the far‑infrared (FIR) spectral range is an advanced tool for scientifc research in biology, chemistry, and material science because many materials leave signatures in the radiation spectrum. Narrow‑band spectral lines enable researchers to investigate the matter response in greater detail. The generation of highly monochromatic variable frequency FIR radiation has therefore become a broad area of research. High energy electron beams consisting of a long train of dense bunches of particles provide a super‑radiant regime and can generate intense highly monochromatic radiation due to coherent emission in the spectral range from a few GHz to potentially a few THz. We employed novel coherent Cherenkov difraction radiation (ChDR) as a generation mechanism. This efect occurs when a fast charged particle moves in the vicinity of and parallel to a dielectric interface. Two key features of the ChDR phenomenon are its non‑invasive nature and its photon yield being proportional to the length of the radiator. The bunched structure of the very long electron beam produced spectral lines that were observed to have frequencies upto 21 GHz and with a relative bandwidth of 10–4 ~ 10–5. The line bandwidth and intensity are defned by the shape and length of the bunch train. A compact linear accelerator can be utilized to control the resonant wavelength by adjusting the bunch sequence frequency. A fast particle passing by an atom interacts with the electron shell forming a dipole that oscillates, inducing polarization currents that are changing in time 1. -

Development of a Transition Radiation Detector and Reconstruction of Photon Conversions in the CBM Experiment
Melanie Klein-Bösing Development of a Transition Radiation Detector and Reconstruction of Photon Conversions in the CBM Experiment — 2009 — Experimentelle Physik Development of a Transition Radiation Detector and Reconstruction of Photon Conversions in the CBM Experiment Inauguraldissertation zur Erlangung des Doktorgrades der Naturwissenschaften im Fachbereich Physik der Mathematisch-Naturwissenschaftlichen Fakultät der Westfälischen Wilhelms-Universität Münster vorgelegt von Melanie Klein-Bösing aus Telgte — 2009 — Dekan: Prof. Dr. J. P. Wessels Erster Gutachter: Prof. Dr. J. P. Wessels Zweiter Gutachter: PD Dr. A. Khoukaz Tag der Disputation: Tag der Promotion: Contents Introduction 5 1 Theoretical Overview 9 1.1 ParticlesandForces............................. 9 1.1.1 LeptonsandQuarks .. .. .. .. .. .. .. 10 1.1.2 Hadrons............................... 12 1.1.3 Interactions............................. 12 1.2 Quark-GluonPlasmaandHadronGas . 15 1.2.1 The Phase Diagram of StronglyInteractingMatter . .... 15 1.2.2 Chiral-SymmetryRestoration . 17 1.3 RelativisticHeavy-IonCollisions. ..... 18 1.3.1 ExplorationoftheQCDPhaseDiagram . 20 1.3.2 SignaturesforaPhaseTransition. 23 2 ProbingHeavy-IonCollisionswithDileptonsandPhotons 29 2.1 Dileptons .................................. 29 2.1.1 PreviousExperimentalResultsonDileptons . .... 32 2.2 DirectPhotons ............................... 37 2.2.1 ThermalPhotons .......................... 38 2.2.2 Non-ThermalPhotons . 41 2.2.3 Previous Experimental Results on Direct Photons . ..... 41 3 Interaction of Charged Particles and Photons with Matter 47 3.1 EnergyLossofChargedParticles. .. 47 3.2 Additional Mechanisms for Radiative Energy Loss of Charged Particles . 52 3.2.1 CherenkovRadiation . 52 1 2 Contents 3.2.2 TransitionRadiation . 54 3.3 InteractionofPhotonswithMatter . ... 59 4 The CBM Experiment 65 4.1 The Future Facility for Antiproton and Ion Research (FAIR) ....... 65 4.2 Physics Goals and Observables of the CBM Experiment . ...... 68 4.3 DetectorConcept ............................. -

Limits on the Applicability of Classical Electromagnetic Fields As Inferred from the Radiation Reaction1 Kirk T
Limits on the Applicability of Classical Electromagnetic Fields as Inferred from the Radiation Reaction1 Kirk T. McDonald Joseph Henry Laboratories, Princeton University, Princeton, NJ 08544 (May 12, 1997; updated January 29, 1998) Abstract Can the wavelength of a classical electromagnetic field be arbitrarily small, or its electric field strength be arbitrarily large? If we require that the radiation- reaction force field be smaller than the Lorentz force we find limits on the classical electromagnetic field that herald the need for a better theory, i.e., one in better accord with experiment. The classical limitations find ready interpretation in quantum electrodynamics. The examples of Compton scat- tering and the QED critical field strength are discussed. It is still open to conjecture whether the present theory of QED is valid at field strengths be- yond the critical field revealed by a semiclassical argument. 1 Introduction The ultimate test of the applicability of a physical theory is the accuracy with which it describes natural phenomena. Yet, on occasion the difficulty of a theory in dealing with a “thought experiment” provides a clue as to limitations of that theory. It has long since been recognized that classical electrodynamics has been surplanted by quantum electrodynamics in some respects. But one doubts that quantum electrodynamics, or even its generalization, the Standard Model of elementary particles, is valid in all domains. To aid in the search for new physics, it is helpful to review the warning signs of the past transitions from one theoretical description to another. The debates as to the meaning of the classical radiation reaction for pointlike particles provide examples of such warning signs. -

Transition Radiation Detectors
Nuclear Instruments and Methods in Physics Research A 666 (2012) 130–147 Contents lists available at SciVerse ScienceDirect Nuclear Instruments and Methods in Physics Research A journal homepage: www.elsevier.com/locate/nima Review Transition radiation detectors A. Andronic a, J.P. Wessels b,c,n a GSI Helmholtzzentrum fur¨ Schwerionenforschung, D-64291 Darmstadt, Germany b Institut fur¨ Kernphysik, Universitat¨ Munster,¨ D-48149 Munster,¨ Germany c European Organization for Nuclear Research CERN, 1211 Geneva, Switzerland article info abstract Available online 3 October 2011 We review the basic features of transition radiation and how they are used for the design of modern Keywords: Transition Radiation Detectors (TRD). The discussion will include the various realizations of radiators as Transition radiation detectors well as a discussion of the detection media and aspects of detector construction. With regard to particle Gaseous detectors identification we assess the different methods for efficient discrimination of different particles and outline the methods for the quantification of this property. Since a number of comprehensive reviews already exist, we predominantly focus on the detectors currently operated at the LHC. To a lesser extent we also cover some other TRDs, which are planned or are currently being operated in balloon or space- borne astro-particle physics experiments. & 2011 Elsevier B.V. All rights reserved. Contents 1. Introduction ......................................................................................................131 -

Classical Electrodynamics Third Edition
Classical Electrodynamics Third Edition John David Jackson Professor Emeritus of Physics, University of California, Berkeley JOHN WILEY & SONS, INC. Contents Introduction and Survey 1 I.1 Maxwell Equations in Vacuum, Fields, and Sources 2 1.2 Inverse Square Law, or the Mass of the Photon 5 1.3 Linear Superposition 9 1.4 Maxwell Equations in Macroscopic Media 13 1.5 Boundary Conditions at Interfaces Between Different Media 16 1.6 Some Remarks an Idealizations in Electromagnetism 19 References and Suggested Reading 22 Chapter 1 / Introduction to Electrostatics 24 1.1 Coulomb's Law 24 1.2 Electric Field 24 1.3 Gauss's Law 27 1.4 Differential Form of Gauss's Law 28 1.5 Another Equation of Electrostatics and the Scalar Potential 29 1.6 Surface Distributions of Charges and Dipoles and Discontinuities in the Electric Field and Potential 31 1.7 Poisson and Laplace Equations 34 1.8 Green's Theorem 35 1.9 Uniqueness of the Solution with Dirichlet or Neumann Boundary Conditions 37 1.10 Formal Solution of Electrostatic Boundary-Value Problem with Green Function 38 1.11 Electrostatic Potential Energy and Energy Density; Capacitance 40 1.12 Variational Approach to the Solution of the Laplace and Poisson Equations 43 1.13 Relaxation Method for Two-Dimensional Electrostatic Problems 47 References and Suggested Reading 50 Problems 50 Chapter 2 / Boundary-Value Problems in Electrostatics: I 57 2.1 Method of Images 57 2.2 Point Charge in the Presence of a Grounded Conducting Sphere 58 2.3 Point Charge in the Presence of a Charged, Insulated, Conducting Sphere -
Beam Monitoring Using Optical Transition Radiation (OTR)
Beam monitoring using Optical Transition Radiation (OTR) M.Sc. Tiago Fiorini da Silva [email protected] Laboratório do Acelerador Linear (LAL) Linear Accelerator Laboratory Laboratório de Implantação Iônica (LIO) Ion Implantation Laboratory Instituto de Física da Universidade de São Paulo Physics Institute of the University of São Paulo June 10th, 2010 - TFS 1 Abstract • Optical Transition Radiation (OTR) has been used for diagnostic purposes in particle beams for several reasons. For instance, linearity with beam current, polarization, spectrum and time of formation are all characteristics that make OTR an excellent tool to monitor beams in a wide range of energies. It will be presented how OTR plays this important role for a complete beam characterization, as well as some experimental data from an OTR based tool used for the diagnostic of low energy and low current electron beams of the IFUSP Microtron. June 10th, 2010 - TFS 2 Summary • Introduction Theoretical background Transition Radiation characteristics • OTR used in beam diagnostics Examples of uses of OTR in beam diagnostics When is an OTR based diagnostic device necessary? • The OTR based tool for the IFUSP Microtron IFUSP Microtron facilities Design & Experimental data • Conclusions June 10th, 2010 - TFS 3 Introduction •Theoretical background •Main characteristics June 10th, 2010 - TFS 4 Introduction Theoretical background Definition: • When a particle travels with constant velocity and crosses the boundary between two media with different electromagnetic properties, it emits radiation with particular angular distribution, polarization and spectra. Predicted by Ginzburg and Tamm in 1946. Firstly observed by Goldsmith and Jelley in 1959. June 10th, 2010 - TFS 5 Introduction Theoretical background In the limit case of a particle incident on a perfect conductor infinite plane: In this case the boundary Before hitting condition ‘creates’ a virtual charge inside the media. -

Photonic and Plasmonic Transition Radiation from Graphene
Photonic and plasmonic transition radiation from graphene Jialin Chen, Hongsheng Chen, and Xiao Lin* Interdisciplinary Center for Quantum Information, State Key Laboratory of Modern Optical Instrumentation, ZJU-Hangzhou Global Science and Technology Innovation Center, College of Information Science and Electronic Engineering, Zhejiang University, Hangzhou 310027, China. *To whom correspondence should be addressed: E-mail: [email protected] (X. Lin) In the framework of full Maxwell equations, we systematically study the electromagnetic radiation, namely the transition radiation, when a swift electron perpendicularly crosses a monolayer graphene. Based on the plane wave expansion and the Sommerfeld integration, we demonstrate the spatial distribution of this free-electron radiation process in the frequency domain, which clearly shows the broadband excitation of both the photons and graphene plasmons. Moreover, the radiation spectra for the excited photons and graphene plasmons are analytically derived. We find that the excitation of photons and graphene plasmons favours different velocities of the swift electron. To be specific, a higher electron velocity can give rise to the excitation of photons with better directivity and higher intensity, while a lower electron velocity can enable the efficient excitation of graphene plasmons in a broader frequency range. Our work indicates that the interaction between swift charged particles and ultrathin 2D materials or metasurfaces is promising for the design of terahertz on-chip radiation sources. Keywords Free-electron radiation · Graphene · Surface plasmon polaritons · Terahertz technology 1 Introduction Transition radiation, as a typical free-electron radiation process, was first theoretically proposed by V. L. Ginzburg and I. Frank in 1945 and later experimentally observed in 1959 [1, 2]. -

07 - Cherenkov and Transition Radiation Detectors
07 - Cherenkov and transition radiation detectors Jaroslav Adam Czech Technical University in Prague Version 2 Jaroslav Adam (CTU, Prague) DPD_07, Cherenkov and transition radiation Version 2 1 / 30 Cherenkov radiation Emitted by passage of charged particle in dielectricum at velocity greater than speed of light in respective material β > 1=n where n is refractive index Dipole moment of polarized electrons, emission of electromagnetic field Jaroslav Adam (CTU, Prague) DPD_07, Cherenkov and transition radiation Version 2 2 / 30 Angle of Cherenkov radiation emission Light emitted into forward cone of aperture 1 cos θ = (1) βn 1 Threshold of Cherenkov light emission given by βthr ≥ n Jaroslav Adam (CTU, Prague) DPD_07, Cherenkov and transition radiation Version 2 3 / 30 Yield of Cherenkov photons Yield per unit length of track proportional to λ−2 Smaller than scintillation light Jaroslav Adam (CTU, Prague) DPD_07, Cherenkov and transition radiation Version 2 4 / 30 Threshold Cherenkov detectors Separation of particles with different masses at the same momentum Set of Cherenkov radiators of different n, different threshold for each particle Radiators of material of desired n or gaseous radiator at a given pressure Jaroslav Adam (CTU, Prague) DPD_07, Cherenkov and transition radiation Version 2 5 / 30 Differential Cherenkov detectors Tagging of particles in selected range of velocities Light reflected by spherical mirror, aperture in front of PM provides velocity window Particles parallel to optical axis (fixed-target experiments) Jaroslav Adam