Optimal Operation of a Multiple Reservoir System
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Folsom50booklet 1 5/10/2006, 10:22 AM This Booklet Was Printed in Cooperation With
U.S. Department of the Interior Bureau of Reclamation Mid-Pacific Region Folsom50Booklet 1 5/10/2006, 10:22 AM This booklet was printed in cooperation with Folsom50Booklet 2 5/10/2006, 10:22 AM U.S. Department of the Interior Bureau of Reclamation Mid-Pacific Region Folsom50Booklet 3 5/10/2006, 10:22 AM Dedication I am pleased to offer my congratulations as Folsom Dam celebrates its 50th Anniversary. For half a century, through drought and flood, Folsom Dam has managed American River flows for the benefit of people, farms, industry, and the environment. Since its completion in 1956, it has effectively controlled flooding. Even several months before its final William E. Rinne completion, Folsom Dam prevented flood Acting Commissioner damage when a major tropical storm Bureau of Reclamation triggered rapid snowmelt. The dam impounded so much runoff that Folsom Lake filled in one week rather than the one year anticipated by engineers. It is estimated that this magnificent dam has prevented more than $5 billion in flood damage to downstream agricultural and urban areas, a testament to the foresight of the men and women who envisioned and built it. Today, Folsom Dam provides 500,000 acre-feet of water for irrigation and urban uses annually. It plays an important role in fisheries enhancement and water quality improvement in the San Francisco Bay-Delta. The dam also provides clean, renewable electricity. In 2005, it produced more than 690 million kilowatt hours. As a recreational facility, Folsom Lake is one of the most visited recreation areas operated by the California Department of Parks and Recreation. -

3A.12 Parks and Recreation - Land
3A.12 PARKS AND RECREATION - LAND The two local roadway connections from the Folsom Heights property off-site into El Dorado Hills would not generate direct increases in population that could result in additional demand for parkland facilities in El Dorado County. Therefore, the “Affected Environment” does not contain a discussion of conditions in El Dorado County related to parks and recreation. 3A.12.1 AFFECTED ENVIRONMENT REGIONAL ENVIRONMENT Folsom Lake Folsom Lake State Recreation Area (SRA), located approximately 5 miles north of the SPA, serves the greater Sacramento area for recreation in the form of camping, hiking, biking, boating, and other outdoor recreation activities. The lake also hosts bass fishing tournaments that frequently draw fishermen from throughout the state. California State Parks manages the Folsom Lake SRA, which includes Folsom Lake and the surrounding facilities. The lake features approximately 75 miles of shoreline and 80 miles of trails that provide opportunities for hiking, horseback riding, nature studies, camping, and picnicking. There are seven major recreation areas with facilities located around the lake. The Folsom Lake SRA, including Folsom Lake, is one of the most heavily used recreational facilities in the California State Park system, with 2 to 3 million visitor days per year. Approximately 75% of the annual visitations to the Folsom Lake SRA occur during the spring and summer, and many (85%) of the Folsom Lake SRA activities are water dependent. The Lake Natoma sub-unit of the Folsom Lake SRA is located adjacent to the City of Folsom, between Hazel Avenue and Folsom Dam, upstream from the Sacramento County-operated portion of the American River Parkway. -
THE DAMMED ///';/$A "
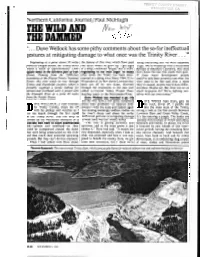
- -.. -- ~~ ~ Northern California Journal/Paul McHugh THE WILD AND IQ~u?5r THE DAMMED ///';/$a ". Dave Wellock has some pithy comments about the so-far ineffectual gestures at mitigating damage to what once was the Trinity River . .9 9 Originating at a point about 50 miles the history of this river, which flows past losing everything else we were supposed from the Oregon border. the Trinity River the ranch where he grew up, I got signs to get. We've wound up with a watershed drains a basin of appro.rimately 2.900 of a deep, emotional fatigue that is more devoted to Southern California. But they square miles in the northern part of Cal- frightening to me than anger. In study don't know the cost that made their gain. ijornia. Flowing from the 5.000-foot after study the Trinity has been docu- If these water development people mountains of the Shasta-Trinity National mented as a dying river. Since 1964.85 to could've only been around to see what the Forest. this river winds its way through 90 percent of its flow above Lewiston has river used to be like and what a mess Trinity and Humboldt counties. where it been cut off by two dams, diverted they've caused, maybe they'd have differ- formerly supplied a fertile habitat for through the mountains to the east and ent ideas. Maybe not. But what can we as salmon and steelhead until it joined with added to Central Valley Project flows small taxpayers do? We're fighting our- the Klamath River at a point 40 miles heading south to the Sacramento River. -

Folsom City Council Staff Re Ort
Folsom City Council Staff Re ort MEETING DATE: 5/12/2020 AGENDA SECTION: Consent Calendar SUBJECT: Resolution No. I 0434- A Resolution Approving the Preliminary Engineer's Report for the following Landscaping and Lighting Districts for Fiscal Year 2020-2021 American River Canyon North, American River Canyon North No. 2, American River Canyon North No. 3, Blue Ravine Oaks, Blue Ravine Oaks No. 2, Briggs Ranch, Broadstone, Broadstone No. 4, Broadstone Unit No. 3, Cobble Ridge, Cobble Hills Ridge II/Reflections II, Folsom Heights, Folsom Heights No. 2, Hannaford Cross, Lake Natoma Shores, Los Cerros, Natoma Station, Natoma Valley, Prairie Oaks Ranch, Prospect Ridge, Sierra Estates, Silverbrook, Steeplechase, The Residences at American River Canyon, The Residences at American River Canyon II, Willow Creek Estates East, Willow Creek Estates East No. 2, Willow Creek Estates South, and Willow Springs FROM: Parks and Recreation Department RECOMMENDATION I CITY COUNCIL ACTION Staff recommends the City Council adopt Resolution No.10434- A Resolution Approving the Preliminary Engineer's Report for the following Landscaping and Lighting Districts for Fiscal Year 2020-2021 American River Canyon North, American River Canyon North No. 2, American River Canyon North No. 3, Blue Ravine Oaks, Blue Ravine Oaks No. 2, Briggs Ranch, Broadstone, Broadstone No. 4, Broadstone Unit No. 3, Cobble Ridge, Cobble Hills Ridge II/Reflections II, Folsom Heights, Folsom Heights No. 2, Hannaford Cross, Lake Natoma Shores, Los Cerros, Natoma Station, Natoma Valley, Prairie Oaks Ranch, Prospect Ridge, Sierra Estates, Silverbrook, Steeplechase, The Residences at American River Canyon, The Residences at American River Canyon II, Willow Creek Estates East, Willow Creek Estates East No. -

Mining's Toxic Legacy
Mining’s Toxic Legacy An Initiative to Address Mining Toxins in the Sierra Nevada Acknowledgements _____________________________ ______________________________________________________________________________________________________________ The Sierra Fund would like to thank Dr. Carrie Monohan, contributing author of this report, and Kyle Leach, lead technical advisor. Thanks as well to Dr. William M. Murphy, Dr. Dave Brown, and Professor Becky Damazo, RN, of California State University, Chico for their research into the human and environmental impacts of mining toxins, and to the graduate students who assisted them: Lowren C. McAmis and Melinda Montano, Gina Grayson, James Guichard, and Yvette Irons. Thanks to Malaika Bishop and Roberto Garcia for their hard work to engage community partners in this effort, and Terry Lowe and Anna Reynolds Trabucco for their editorial expertise. For production of this report we recognize Elizabeth “Izzy” Martin of The Sierra Fund for conceiving of and coordinating the overall Initiative and writing substantial portions of the document, Kerry Morse for editing, and Emily Rivenes for design and formatting. Many others were vital to the development of the report, especially the members of our Gold Ribbon Panel and our Government Science and Policy Advisors. We also thank the Rose Foundation for Communities and the Environment and The Abandoned Mine Alliance who provided funding to pay for a portion of the expenses in printing this report. Special thanks to Rebecca Solnit, whose article “Winged Mercury and -

Figure 6-3. California's Water Infrastructure Network
DA 17 DA 67 DA 68 DA 22 DA 29 DA 39 DA 40 DA 41 DA 46 N. FORK N. & M. TUOLOMNE YUBA RIVER FORKS CHERRY CREEK, RIVER Figure 6-3. California's Water Infrastructure ELEANOR CREEK AMERICAN M & S FORK RIVER YUBA RIVER New Bullards Hetch Hetchy Res Bar Reservoir GREENHORN O'Shaughnessy Dam Network Configuration for CALVIN (1 of 2) SR- S. FORK NBB CREEK & BEAR DA 32 SR- D17 AMERICAN RIVER HHR DA 42 DA 43 DA 44 RIVER STANISLAUS SR- LL- C27 RIVER & 45 Camp Far West Reservoir DRAFT Folsom Englebright C31 Lake DA 25 DA 27 Canyon Tunnel FEATHER Lake 7 SR- CALAVERAS New RIVER SR-EL CFW SR-8 RIVER Melones Lower Cherry Creek MERCED MOKELUMNE Reservoir SR-10 Aqueduct ACCRETION CAMP C44 RIVER FAR WEST TO DEER CREEK C28 FRENCH DRY RIVER CREEK WHEATLAND GAGE FRESNO New Hogan Lake Oroville DA 70 D67 SAN COSUMNES Lake RIVER SR- 0 SR-6 C308 SR- JOAQUIN Accretion: NHL C29 RIVER 81 CHOWCHILLA American River RIVER New Don Lake McClure Folsom to Fair D9 DRY Pardee Pedro SR- New Exchequer RIVER Oaks Reservoir 20 CREEK Reservoir Dam SR- Hensley Lake DA 14 Tulloch Reservoir SR- C33 Lake Natoma PR Hidden Dam Nimbus Dam TR Millerton Lake SR-52 Friant Dam C23 KELLY RIDGE Accretion: Eastside Eastman Lake Bypass Accretion: Accretion: Buchanan Dam C24 Yuba Urban DA 59 Camanche Melones to D16 Upper Merced D64 SR- C37 Reservoir C40 2 SR-18 Goodwin River 53 D62 SR- La Grange Dam 2 CR Goodwin Reservoir D66 Folsom South Canal Mokelumne River Aqueduct Accretion: 2 D64 depletion: Upper C17 D65 Losses D85 C39 Goodwin to 3 Merced River 3 3a D63 DEPLETION mouth C31 2 C25 C31 D37 -

Appendix B ~ HISTORIC DISTRICT DESIGN and DEVELOPMENT GUIDELINES~
Appendix B ~ HISTORIC DISTRICT DESIGN AND DEVELOPMENT GUIDELINES~ Appendix B Visual Resources B.01 VISUAL RESOURCES B.01.01 Regional he Folsom Historic District is located in the central-western portion of the City of Folsom, at T the western edge of the Sierra Nevada foothills. The surrounding region to the east includes primarily grassy rolling hills dotted with oak trees. Elevations increase to 500 ft. above mean sea level (msl) within 10 miles of the Historic District. To the west is the mostly urbanized Sacramento metropolitan area, with elevations near 100 ft. msl. Northeast of the Historic District, Folsom Dam and Folsom Lake are prominent visual features. The lake and surrounding shoreline are part of the Folsom Lake State Recreation Area (FLSRA), which offers opportunities to view the lake and the dam. Folsom Prison, including a broad buffer area of open grassland~ and the FolsomEity'Park lie between the Historic District and Folsom Lake. Southeast of the Historic District is a residential and modern commercial zone, while the area directly south includes land scheduled for development which in 1995 was vegetated by grassland, oak woodland, and a narrow riparian strip along Willow Creek. The west and north boundaries of the Historic District are formed by the Lake Natoma section of the American River. The American River, Lake Natoma, and Folsom Lake contribute significantly to the overall visual character of the Folsom area. Much of this lake/river complex is surrounded by the open space of the FLSRA with a fairly intact greenbelt of lush riparian vegetation and unique bedrock outcroppings that lend, a distinct natural quality to the urban landscape. -

2018 Clear Creek Technical Team Annual Report for the Coordinated Long-Term Operations Biological Opinion
2018 Clear Creek Technical Team Annual Report for the Coordinated Long-Term Operations Biological Opinion Table of Contents CHAPTER 1. BACKGROUND ............................................................................................... 3 1.1 Brief background on Clear Creek and the Technical Team: ............................................ 3 1.2 Current Active Members .................................................................................................. 3 1.3 List of Clear Creek Technical Team Discussions: ........................................................... 5 CHAPTER 2. SUMMARY OF CLEAR CREEK RPA ACTIONS ......................................... 6 Implementation of RPA Actions in WY 2018 ............................................................................ 6 2.1.1 Action I.1.1. Spring Attraction Flows ...................................................................... 6 2.1.2 RPA Action I.1.2. Channel Maintenance Flows ....................................................... 9 2.1.3 RPA Action I.1.3. Spawning Gravel Augmentation .............................................. 10 2.1.4 RPA Action I.1.4. Spring Creek Temperature Control Curtain .............................. 11 2.1.5 RPA Action I.1.5. Thermal Stress Reduction ......................................................... 11 2.1.6 RPA Action I.1.6. Adaptively Manage to Habitat Suitability/IFIM Study Results 14 1 Acronyms and Abbreviations ACID Anderson-Cottonwood Irrigation Diversion BLM Bureau of Land Management BO Biological Opinion CCV California -

Fishing at Whiskeytown Lake
National Park Service Whiskeytown U.S. Department of the Interior Whiskeytown National Recreation Area Fishing at Whiskeytown Before Whiskeytown Lake was constructed, the area’s streams and creeks provided an abundance of fish for people and wildlife. Today, one of the most popular water sports within Whiskeytown National Recreational Area is fishing. The clear waters of Whiskeytown support a variety of game fish that can be successfully caught from a boat or from the lake and stream shoreline. Regulations Seasons Posted Closures Fishing is allowed year- round in the lake, All creeks and tributaries to the Sacra- however, the streams feeding mento River are only open from the last Whiskeytown are only available for fishing Saturday in April through November 15. from the last Saturday in April through Clear Creek below Whiskeytown Dam is November 15. catch and release only. Contact park headquarters for special posted closures. License Requirements Anyone 16 years old or older must have a California Regulations valid California fishing license displayed Fishing at Whiskeytown NRA must be on his or her person. Fishing licenses may done in conformity with the laws and be purchased at the Oak Bottom Marina regulations of the State of California unless during the summer season. otherwise specified in this bulletin. Please refer to the “California Sport Fishing Special Regulations Regulations” printed annually by the Fish of any kind may not be used for bait. Department of Fish and Game, State of Fishing hours are from one hour before California for further information. sunrise to one hour after sunset for trout Whiskeytown NRA is located within the and salmon. -

Folsom City Council Staff Ort
Folsom City Council Staff ort MEETING DATE: slrv202l AGENDA SECTION: Consent Calendar SUBJECT: Resolution No. 10625 - A Resolution Approving the Preliminary Engineer's Report for the following Landscaping and Lighting Districts for Fiscal Year 2021-2022 American River Canyon North, American River Canyon North No. 2, American River Canyon North No. 3, Blue Ravine Oaks, Blue Ravine Oaks No. 2, Briggs Ranch, Broadstone, Broadstone No. 4, Broadstone Unit No. 3, Cobble fudge, Cobble Hills Ridge IllReflections II, Folsom Heights, Folsom Heights No. 2, Hannaford Cross, Lake Natoma Shores, Los Cerros, Natoma Station, Natoma Valley, Prairie Oaks Ranch, Prospect Ridge, Sierra Estates, Silverbrook, Steeplechase, The Residences at American River Canyon, The Residences at American River Canyon II, Willow Creek Estates East, Willow Creek Estates East No. 2, Willow Creek Estates South, and Willow Springs F'ROM: Parks and Recreation Department RECOMMENDATION / CITY COUNCIL ACTION Staff recommends the City Council adopt Resolution No. 10625 - A Resolution Approving the Preliminary Engineer's Report for the following Landscaping and Lighting Districts for Fiscal Year 202I-2022 American River Canyon North, American River Canyon North No. 2, American River Canyon North No. 3, Blue Ravine Oaks, Blue Ravine Oaks No. 2, Briggs Ranch, Broadstone, Broadstone No. 4, Broadstone Unit No. 3, Cobble Ridge, Cobble Hills Ridge IllReflections II, Folsom Heights, Folsom Heights No. 2, Hannaford Cross, Lake Natoma Shores, Los Cerros, Natoma Station, Natoma Valley, Prairie Oaks Ranch, Prospect Ridge, Sierra Estates, Silverbrook, Steeplechase, The Residences at American River Canyon, The Residences at American River Canyon II, Willow Creek Estates East, Willow Creek Estates East No. -

State of the River Report
Lower American River State of the River Report Water Forum 660 J Street, Suite 260 Sacramento, CA 95814 1 April 2005 Lower American River The Water Forum is a diverse group of business and agricultural leaders, citizens groups, environmentalists, water managers, and local governments in the Sacramento Region that have joined to fulfill two co-equal objectives: • Provide a reliable and safe water supply for the region’s economic health and planned development to the year 2030; and • Preserve the fishery, wildlife, recreational, and aesthetic values of the lower American River. In 2000, Water Forum members approved a comprehensive Water Forum Agreement, consisting of integrated actions necessary to provide a regional solution to potential water shortages, environmental degradation, groundwater contamination, threats to groundwater reliability, and limits to economic prosperity. The Water Forum Agreement allows the region to meet its needs in a balanced way through implementation of seven elements. The seven elements of the Water Forum Agreement are: 1) increased surface water diversions, 2) actions to meet customers’ needs while reducing diversion impacts in drier years, 3) an improved pattern of fishery flow releases from Folsom Reservoir, 4) lower American River Habitat Management Element, 5) water conservation, 6) groundwater management, and 7) the Water Forum Successor Effort (WFSE). The WFSE was created to implement the seven elements of the Water Forum Agreement over the next 30 years. Additional information can be found on the Water Forum’s web site at: www.waterforum.org. Water Forum 660 J Street, Suite 260 Sacramento, CA 95814 April 2005 2 Lower American River State of the River Report 3 Letter to Readers Dear Reader, This is the first lower American River State of the River Report. -

Appendix C ~HISTORIC DISTRICT DESIGN and DEVELOPMENT GUIDELINES~
Appendix C ~HISTORIC DISTRICT DESIGN AND DEVELOPMENT GUIDELINES~ Appendix C Environmental Resources he Folsom Historic District encompasses both developed lands and open space areas. These T existing undeveloped areas support most of the important natural environmental resources in the project area. The open space is concentrated primarily along the south bank of Lake Natoma within the Lake Natoma Unit of the Folsom Lake State Recreation Area (FLSRA). Within the Historic District boundaries, the FLSRA consists of federally owned land and state-owned lands that contain dredge tailings. These lands are managed by the California Department of Parks and Recreation. The City's intent is to continue its policy of cooperation with the California Department of Parks and Recreation. This cooperation may include joint development of trails, parking, and other facilities consistent with the missions of both agencies as well as communication and problem-solving on topics of mutual concern. Most of the central portion of the Historic District is developed urban land, but small areas support small amounts of the same communities· found on the state-managed lands. The City values the trees and other landscaping installed im the .developed, area for their contribution to the natural · environment as well as to the attractiveness and comfort of the District. The following sections discuss environmental resources that occur throughout the Historic. District. C.O 1 GEOLOGY he City of Folsom is located offthe·east·margin,of the··SacramentoValley-at the·base of.the T central Sierra Nevada foothills. Within the Historic District, elevations vary from approximately 130 ft. above mean sea level (msl) to 320 ft.