A Low Cost Implementation of Autonomous Takeoff and Landing for a Fixed Wing UAV
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Aiaa 96-2517-Cp Twin Tail/Delta Wing Configuration Buffet
AIAA 96-2517-CP TWIN TAIL/DELTA WING CONFIGURATION BUFFET DUE TO UNSTEADY VORTEX BREAKDOWN FLOW Osama A. Kandil, Essam F. Sheta and Steven J. Massey Aerospace Engineering Department Old Dominion University Norfolk, VA 23529 The 14th AIAA Applied Aerodynamics Conference New Orleans, LA-June 18-20, 1996 I | For Permission to copy or republish, contact the American Institute of Aeronautics and Astronautics 370 12Enfant Promenade, S. W., Washington, D.C. 20024 / NASA-CR-203259 o J _"_G"7"_ COMPUTATION AND VALIDATION OF FLUID/ STRUCTURE TWIN TAIL BUFFET RESPONSE Osama A. Kandil and Essam F. Sheta Aerospace Engineering Department Old Dominion University, Norfolk, VA 23529, USA C. H. Liu Aerodynamics Methods and Acoustics Branch NASA Langley Research Center, Hampton, VA 23665, USA EUROMECH COLLOQUIUM 349 STRUCTURE FLUID INTERACTION IN AERONAUTICS Institute Fiir Aeroelastik, GSttingen, Germany September 16-18, 1996 COMPUTATION AND VALIDATION OF FLUID/STRUCTURE TWIN TAIL BUFFET RESPONSE Osama A. Kandil 1 and Essam F. Sheta: Aerospace Engineering Department Old Dominion University, Norfolk, VA 23529, USA and C. H. Liu 3 Aerodynamics Methods and Acoustics Branch NASA Langley Research Center, Hampton, VA 23665, USA ABSTRACT The buffet response of the flexible twin-tail/delta wing configuration-a multidisciplinary problem is solved using three sets of equations on a multi-block grid structure. The first set is the unsteady, compressible, full Navier-Stokes equations which are used for obtaining the flow-filed vector and the aerodynamic loads on the twin tails. The second set is the coupled aeroelastic equations which are used for obtaining the bending and torsional deflections of the twin tails. -

General Aviation Aircraft Design
Contents 1. The Aircraft Design Process 3.2 Constraint Analysis 57 3.2.1 General Methodology 58 1.1 Introduction 2 3.2.2 Introduction of Stall Speed Limits into 1.1.1 The Content of this Chapter 5 the Constraint Diagram 65 1.1.2 Important Elements of a New Aircraft 3.3 Introduction to Trade Studies 66 Design 5 3.3.1 Step-by-step: Stall Speed e Cruise Speed 1.2 General Process of Aircraft Design 11 Carpet Plot 67 1.2.1 Common Description of the Design Process 11 3.3.2 Design of Experiments 69 1.2.2 Important Regulatory Concepts 13 3.3.3 Cost Functions 72 1.3 Aircraft Design Algorithm 15 Exercises 74 1.3.1 Conceptual Design Algorithm for a GA Variables 75 Aircraft 16 1.3.2 Implementation of the Conceptual 4. Aircraft Conceptual Layout Design Algorithm 16 1.4 Elements of Project Engineering 19 4.1 Introduction 77 1.4.1 Gantt Diagrams 19 4.1.1 The Content of this Chapter 78 1.4.2 Fishbone Diagram for Preliminary 4.1.2 Requirements, Mission, and Applicable Regulations 78 Airplane Design 19 4.1.3 Past and Present Directions in Aircraft Design 79 1.4.3 Managing Compliance with Project 4.1.4 Aircraft Component Recognition 79 Requirements 21 4.2 The Fundamentals of the Configuration Layout 82 1.4.4 Project Plan and Task Management 21 4.2.1 Vertical Wing Location 82 1.4.5 Quality Function Deployment and a House 4.2.2 Wing Configuration 86 of Quality 21 4.2.3 Wing Dihedral 86 1.5 Presenting the Design Project 27 4.2.4 Wing Structural Configuration 87 Variables 32 4.2.5 Cabin Configurations 88 References 32 4.2.6 Propeller Configuration 89 4.2.7 Engine Placement 89 2. -

Evaluation of V-22 Tiltrotor Handling Qualities in the Instrument Meteorological Environment
University of Tennessee, Knoxville TRACE: Tennessee Research and Creative Exchange Masters Theses Graduate School 5-2006 Evaluation of V-22 Tiltrotor Handling Qualities in the Instrument Meteorological Environment Scott Bennett Trail University of Tennessee - Knoxville Follow this and additional works at: https://trace.tennessee.edu/utk_gradthes Part of the Aerospace Engineering Commons Recommended Citation Trail, Scott Bennett, "Evaluation of V-22 Tiltrotor Handling Qualities in the Instrument Meteorological Environment. " Master's Thesis, University of Tennessee, 2006. https://trace.tennessee.edu/utk_gradthes/1816 This Thesis is brought to you for free and open access by the Graduate School at TRACE: Tennessee Research and Creative Exchange. It has been accepted for inclusion in Masters Theses by an authorized administrator of TRACE: Tennessee Research and Creative Exchange. For more information, please contact [email protected]. To the Graduate Council: I am submitting herewith a thesis written by Scott Bennett Trail entitled "Evaluation of V-22 Tiltrotor Handling Qualities in the Instrument Meteorological Environment." I have examined the final electronic copy of this thesis for form and content and recommend that it be accepted in partial fulfillment of the equirr ements for the degree of Master of Science, with a major in Aviation Systems. Robert B. Richards, Major Professor We have read this thesis and recommend its acceptance: Rodney Allison, Frank Collins Accepted for the Council: Carolyn R. Hodges Vice Provost and Dean of the Graduate School (Original signatures are on file with official studentecor r ds.) To the Graduate Council: I am submitting herewith a thesis written by Scott Bennett Trail entitled “Evaluation of V-22 Tiltrotor Handling Qualities in the Instrument Meteorological Environment”. -
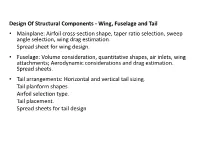
Wing, Fuselage and Tail • Mainplane: Airfoil Cross-Section Shape, Taper Ratio Selection, Sweep Angle Selection, Wing Drag Estimation
Design Of Structural Components - Wing, Fuselage and Tail • Mainplane: Airfoil cross-section shape, taper ratio selection, sweep angle selection, wing drag estimation. Spread sheet for wing design. • Fuselage: Volume consideration, quantitative shapes, air inlets, wing attachments; Aerodynamic considerations and drag estimation. Spread sheets. • Tail arrangements: Horizontal and vertical tail sizing. Tail planform shapes. Airfoil selection type. Tail placement. Spread sheets for tail design Main Wing Design 1. Introduction: Airfoil Geometry: • Wing is the main lifting surface of the aircraft. • Wing design is the next logical step in the conceptual design of the aircraft, after selecting the weight and the wing-loading that match the mission requirements. • The design of the wing consists of selecting: i) the airfoil cross-section, ii) the average (mean) chord length, iii) the maximum thickness-to-chord ratio, iv) the aspect ratio, v) the taper ratio, and Wing Geometry: vi) the sweep angle which is defined for the leading edge (LE) as well as the trailing edge (TE) • Another part of the wing design involves enhanced lift devices such as leading and trailing edge flaps. • Experimental data is used for the selection of the airfoil cross-section shape. • The ultimate “goals” for the wing design are based on the mission requirements. • In some cases, these goals are in conflict and will require some compromise. Main Wing Design (contd) 2. Airfoil Cross-Section Shape: • Effect of ( t c ) max on C • The shape of the wing cross-section determines lmax for a variety of the pressure distribution on the upper and lower 2-D airfoil sections is surfaces of the wing. -
Advanced Pilot Training (APT T-X) Aircraft and 46 Ground-Based Training Systems (GBTS) to Replace the Existing Fleet of T-38C Jet Trainers
Air Force T-7A Red Hawk Trainer Updated September 18, 2019 Congressional Research Service https://crsreports.congress.gov R44856 Air Force T-7A Red Hawk Trainer Summary NOTE: This report was originally written by Ceir Coral while he was an Air Force Fellow at the Congressional Research Service. Since his departure, it has been maintained by Jeremiah Gertler of CRS. On September 27, 2018, the United States Air Force (USAF) awarded The Boeing Company a contract, worth up to $9.2 billion, to procure 351 Advanced Pilot Training (APT T-X) aircraft and 46 Ground-Based Training Systems (GBTS) to replace the existing fleet of T-38C jet trainers. The Air Force had originally valued the contract at roughly $19.7 billion. Information on the value of other competitors’ bids was not available. On September 16, 2019, Acting Secretary of the Air Force Matthew Donovan announced that in service, the T-X aircraft would be known as the T-7A Red Hawk. In this report, “APT T-X” will be used to identify the entire training system, while “T-7A” will refer to the aircraft portion of that system. The FY2020 Administration budget request included $348.473 million for the APT T-X. According to the USAF, the current T-38C trainer fleet is old, costly, and outdated, and lacks the technology to train future pilots for fifth-generation fighter and bomber operations. Based on Air Education Training Command’s evaluation of the required capabilities to train future pilots for fifth-generation fighters and bombers, the T-38C falls short in 12 of 18 capabilities, forcing the USAF to train for those capabilities in operational units where flying hours are costly and can affect fleet readiness. -

Active and Adaptive Flow Control of Twin-Tail Buffet and Applications
Old Dominion University ODU Digital Commons Mechanical & Aerospace Engineering Theses & Dissertations Mechanical & Aerospace Engineering Winter 2002 Active and Adaptive Flow Control of Twin-Tail Buffet and Applications Zhi Yang Old Dominion University Follow this and additional works at: https://digitalcommons.odu.edu/mae_etds Part of the Aerodynamics and Fluid Mechanics Commons, and the Structures and Materials Commons Recommended Citation Yang, Zhi. "Active and Adaptive Flow Control of Twin-Tail Buffet and Applications" (2002). Doctor of Philosophy (PhD), Dissertation, Mechanical & Aerospace Engineering, Old Dominion University, DOI: 10.25777/8x26-fk76 https://digitalcommons.odu.edu/mae_etds/94 This Dissertation is brought to you for free and open access by the Mechanical & Aerospace Engineering at ODU Digital Commons. It has been accepted for inclusion in Mechanical & Aerospace Engineering Theses & Dissertations by an authorized administrator of ODU Digital Commons. For more information, please contact [email protected]. ACTIVE AND ADAPTIVE FLOW CONTROL OF TWIN-TAIL BUFFET AND APPLICATIONS by Zhi Yang B.S., July 1992, Beijing University of Aeronautics & Astronautics M.S., July 1995, Beijing University of Aeronautics & Astronautics A Dissertation Submitted to the Faculty of Old Dominion University in Partial Fulfillment of the Requirements for the Degree of DOCTOR OF PHILOSOPHY AEROSPACE ENGINEERING OLD DOMINION UNIVERSITY December 2002 Approved by Osama. A. Kandil (Director) iktay Baysal (Member) Brett A. Newman (Member) Gene Hou (Member) Reproduced with permission of the copyright owner. Further reproduction prohibited without permission. ABSTRACT ACTIVE AND ADAPTIVE FLOW CONTROL OF TWIN-TAIL BUFFET AND APPLICATIONS Zhi Yang Old Dominion University, 2002 Director: Dr. Osama A. Kandil Modem fighter aircraft with dual vertical tails are operated at high angles of attack. -

An Experimental Study on the Effects of Adverse Weathers on the Flight Performance of an Unmanned-Aerial-System (UAS)
Iowa State University Capstones, Theses and Graduate Theses and Dissertations Dissertations 2021 An experimental study on the effects of adverse weathers on the flight performance of an Unmanned-Aerial-System (UAS) Muhammad Ahmad Siddique Iowa State University Follow this and additional works at: https://lib.dr.iastate.edu/etd Recommended Citation Siddique, Muhammad Ahmad, "An experimental study on the effects of adverse weathers on the flight performance of an Unmanned-Aerial-System (UAS)" (2021). Graduate Theses and Dissertations. 18615. https://lib.dr.iastate.edu/etd/18615 This Thesis is brought to you for free and open access by the Iowa State University Capstones, Theses and Dissertations at Iowa State University Digital Repository. It has been accepted for inclusion in Graduate Theses and Dissertations by an authorized administrator of Iowa State University Digital Repository. For more information, please contact [email protected]. An experimental study on the effects of adverse weathers on the flight performance of an Unmanned-Aerial-System (UAS) by Muhammad Ahmad Siddique A thesis submitted to the graduate faculty in partial fulfillment of the requirements for the degree of MASTER OF SCIENCE Major: Aerospace Engineering Program of Study Committee: Hui Hu, Co-Major Professor Abdelkhalik Ossama Omar, Co-Major Professor Ali Jannesari The student author, whose presentation of the scholarship herein was approved by the program of study committee, is solely responsible for the content of this thesis. The Graduate College will ensure this thesis is globally accessible and will not permit alterations after a degree is conferred. Iowa State University Ames, Iowa 2021 Copyright © Muhammad Ahmad Siddique, 2021. -

FAA Safety Briefing January/February 2020 Volume 60/Number 1
November/DecemberJanuary/February 2020 2019 Know Your Aircraft Federal Aviation 8 NoA VerySurprises Long Title for One of the20 FeatureThe Wing’s Title24 Give of One Me Feature a Brake ... Administration 10KeepingStories Control Could Possiblyof Go in thisthe SpaceThing 16 Storyand Maybe Goes Here a Tire and a Avionics and Automation Strut TooJanuary / February 2020 1 ABOUT THIS ISSUE ... U.S. Department of Transportation Federal Aviation Administration ISSN: 1057-9648 FAA Safety Briefing January/February 2020 Volume 60/Number 1 Elaine L. Chao Secretary of Transportation The January/February 2020 issue of FAA Safety Steve Dickson Administrator Briefing focuses on how to better “Know Your Aircraft.” Ali Bahrami Associate Administrator for Aviation Safety Feature articles cover each major section of an Executive Director, Flight Standards Service Rick Domingo aircraft, highlighting the many design, performance Editor Susan Parson and structural variations you’ll likely see and how Tom Hoffmann Managing Editor they affect your flying. We’ll also take a fresh look at James Williams Associate Editor / Photo Editor Jennifer Caron Copy Editor / Quality Assurance Lead understanding aircraft energy management. Paul Cianciolo Associate Editor / Social Media John Mitrione Art Director Published six times a year, FAA Safety Briefing, formerly Contact information FAA Aviation News, promotes aviation safety by discussing current The magazine is available on the internet at: technical, regulatory, and procedural aspects affecting the safe www.faa.gov/news/safety_briefing operation and maintenance of aircraft. Although based on current FAA policy and rule interpretations, all material is advisory or Comments or questions should be directed to the staff by: informational in nature and should not be construed to have • Emailing: [email protected] regulatory effect. -

US. and U.S.S.R. Military Aircraft and Missile Aerodynamics (1970-1980) a Selected, Annotated Bibliography
N8129119 NASA Techi iical Memorandum si95 1 US. and U.S.S.R. Military Aircraft and Missile Aerodynamics (1970-1980) A Selected, Annotated Bibliography Volume I Marie H. Tuttle and Dal V. Maddalon Langley Research Center Hamptoiz, Virgiiiia NASA National Aeronautics and Space Administration Scientific and Technical . Information Branch 1981 REPROWCED BY m. U S Depallmeni of Commerce National Technical InformationService Sprin@eld. Virginia 22161 CONTENTS INTRODUCTION ............................ 1 BIBLIOGRAPHY ............................. 4 .APPENDIX A-SERIAL PUBLICATIONS ................... 56 APPENDIX B-BOOKS .......................... 58 AIRCRAFT AND MISSILE TYPE INDEX .................. 61 Airplanes .............................. 61 Helicopters .............................. 62 Missiles ............................... 62 SUBJECT INDEX ............................ 63 AUTHOR INDEX ............................ 65 PRECEDING PAGE BLANK NOT’ FILMED ... 111 INTRODUCTION The purpose of this selected bibliography is to list available, unclassified, unrestricted publications which provide aerodynamic data on major aircraft and missiles currently used by the military forces of the United States of America and the Union of Soviet Socialist Republics. Technical disciplines surveyed include aerodynamic performance, static And dynamic stability, stall-spin, flutter, buffet, inlets, nozzles, flap performance, and flying qualities. Concentration is on specific aircraft including fighters, bombers, helicopters, missiles, and some work on transports -

Boek Totaal 2014 Updated ... 2 2015.Pdf
Delft University of Technology Delft Aerospace Design Projects 2014 New Designs in Aeronautics, Astronautics and Wind Energy Melkert, Joris Publication date 2014 Document Version Final published version Citation (APA) Melkert, J. (Ed.) (2014). Delft Aerospace Design Projects 2014: New Designs in Aeronautics, Astronautics and Wind Energy. B.V. Uitgeversbedrijf Het Goede Boek. Important note To cite this publication, please use the final published version (if applicable). Please check the document version above. Copyright Other than for strictly personal use, it is not permitted to download, forward or distribute the text or part of it, without the consent of the author(s) and/or copyright holder(s), unless the work is under an open content license such as Creative Commons. Takedown policy Please contact us and provide details if you believe this document breaches copyrights. We will remove access to the work immediately and investigate your claim. This work is downloaded from Delft University of Technology. For technical reasons the number of authors shown on this cover page is limited to a maximum of 10. Delft Aerospace Design Projects 2014 Delft Aerospace Design Projects 2014 New Designs in Aeronautics, Astronautics and Wind Energy Editor: Joris Melkert Co-ordinating committee: Coordinating committee: Vincent Brügemann, Joris Melkert, Erwin Mooij, Gillian Saunders-Smits, Nando Timmer, Wim Verhagen B.V. Uitgeversbedrijf Het Goede Boek / 2014 Published and distributed by B.V. Uitgeversbedrijf Het Goede Boek Surinamelaan 14 1213 VN HILVERSUM The Netherlands ISBN 978 90 240 6012 2 ISSN 1876-1569 © 2014 - Faculty of Aerospace Engineering, Delft University of Technology - Delft All rights reserved. No part of the material protected by this copyright notice may be reproduced or utilized in any form or by any means, electronic or mechanical, including photocopying, recording or by any information storage and retrieval system, without written permission from the publisher. -

United States Patent (19) 11 Patent Number: 5,865,399 Carter, Jr
USOO5865399A United States Patent (19) 11 Patent Number: 5,865,399 Carter, Jr. (45) Date of Patent: Feb. 2, 1999 54). TAIL BOOM FOR AIRCRAFT 2,879,013 3/1959 Herrick ................................... 244f7 A 3,002,569 10/1961 Doblhoff. 75 Inventor: Jay W. Carter, Jr., Burkburnett, Tex. 3,558,082 1/1971 Bennie ................................. 244/17.21 3,563,493 2/1971 Zuck ....................................... 244f7 A 73 Assignee: Cartercopters, L.L.C., Wichita Falls, 4,611,774 9/1986 Brand ...... ... 244/54 TeX. 4,624,425 11/1986 Austin et al. ... 244/54 4,662,582 5/1987 Brand .......... ... 244/54 21 Appl. No.: 985,560 5,209,431 5/1993 Bernard et al. 244/17.17 22 Filed: Dec. 5, 1997 O O Primary Examiner Virna Lissi Mojica Related U.S. Application Data Attorney, Agent, or Firm James E. Bradley 60 Provisional application No. 60/032,137 Dec. 9, 1996. 57 ABSTRACT 51 Int. Cl. 6 ........................... B64C 27/22; E. 2: An aircraft of the type having retractable landing gear and a pusher propeller is provided with a twin tail boom. The tail 52 U.S. Cl. ................................................................ 244/54 boom has a configuration to prevent the lowermost point of 58 Field of Search ................................ 244/7 A, 102 R, the pusher propellergll from contactingprev a landing Surfacep when 244/17.15, 17.17, 17.21, 54, 87,109. 88, 17.19 121, landing the aircraft, even with the landing gear retracted, So s u- • that the engine of the aircraft is not damaged as a result of 56) References Cited the pusher propeller being unable to rotate during the landing. -

Some Buffet Response Characteristics of a Twin-Vertical-Tail Configuration
i t I, NASA Technical Memorandum 1 0 2 7 4 9 Some Buffet Response Characteristics of a Twin-Vertical-Tail Configuration Stanley R. Cole, Steven W. Moss, and Robert V. Doggett, Jr. (NASA-TM-IO_749) SQME nUFFFT RFSPONSF N91-13_12 CNARACTERISTIC3 OF A TWTN-VFgTICAL-TAIL CON_IGURATIO_ (NASA) 25 p CSCL OIA Uncl ;is G3/02 03192_2 October 1990 National Aeronautics and Space Administration Langley Research Center Hampton, Virginia 23665-5225 m SOME BUFFET RESPONSE CHARACTERISTICS OF A TWIN-VERTICAL-TAIL CONFIGURATION By Stanley R. Cole, Steven W. Moss, and Robert V. Doggett, Jr. SUMMARY A rigid, 1/6-size, full-span model of an F-18 airplane was fitted with flexible vertical tails of two different levels of stiffness. These tails were buffet tested in the Langley Transonic Dynamics Tunnel. Vertical-tail buffet response results that were obtained over the range of angles of attack from -10 ° to +40 ° degrees, and over the range of Mach numbers from 0.30 to 0.95 are presented. These results indicate the following: (1) the buffet response occurs in the first bending mode; (2) the buffet response increases with increasing dynamic pressure, but changes in response are not linearly proportional to the changes in dynamic pressure; (3) the buffet response is larger at M=0.30 than it is at the higher Mach numbers; (4) the maximum intensity of the buffeting is described as heavy to severe using an assessment criteria proposed by another investigator; and (5) the data at different dynamic pressures and for the different tails correlate reasonably well using the buffet excitation parameter derived from the dynamic analysis of buffeting.