Agent Based Cucumber Plant Climbing Characteristic Simulation
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Invasive Plants in Your Backyard!
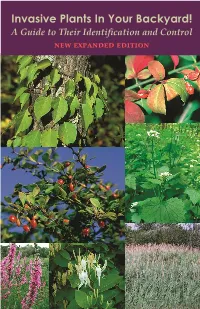
Invasive Plants In Your Backyard! A Guide to Their Identification and Control new expanded edition Do you know what plants are growing in your yard? Chances are very good that along with your favorite flowers and shrubs, there are non‐native invasives on your property. Non‐native invasives are aggressive exotic plants introduced intentionally for their ornamental value, or accidentally by hitchhiking with people or products. They thrive in our growing conditions, and with no natural enemies have nothing to check their rapid spread. The environmental costs of invasives are great – they crowd out native vegetation and reduce biological diversity, can change how entire ecosystems function, and pose a threat Invasive Morrow’s honeysuckle (S. Leicht, to endangered species. University of Connecticut, bugwood.org) Several organizations in Connecticut are hard at work preventing the spread of invasives, including the Invasive Plant Council, the Invasive Plant Working Group, and the Invasive Plant Atlas of New England. They maintain an official list of invasive and potentially invasive plants, promote invasives eradication, and have helped establish legislation restricting the sale of invasives. Should I be concerned about invasives on my property? Invasive plants can be a major nuisance right in your own backyard. They can kill your favorite trees, show up in your gardens, and overrun your lawn. And, because it can be costly to remove them, they can even lower the value of your property. What’s more, invasive plants can escape to nearby parks, open spaces and natural areas. What should I do if there are invasives on my property? If you find invasive plants on your property they should be removed before the infestation worsens. -

Landscape Vines for Southern Arizona Peter L
COLLEGE OF AGRICULTURE AND LIFE SCIENCES COOPERATIVE EXTENSION AZ1606 October 2013 LANDSCAPE VINES FOR SOUTHERN ARIZONA Peter L. Warren The reasons for using vines in the landscape are many and be tied with plastic tape or plastic covered wire. For heavy vines, varied. First of all, southern Arizona’s bright sunshine and use galvanized wire run through a short section of garden hose warm temperatures make them a practical means of climate to protect the stem. control. Climbing over an arbor, vines give quick shade for If a vine is to be grown against a wall that may someday need patios and other outdoor living spaces. Planted beside a house painting or repairs, the vine should be trained on a hinged trellis. wall or window, vines offer a curtain of greenery, keeping Secure the trellis at the top so that it can be detached and laid temperatures cooler inside. In exposed situations vines provide down and then tilted back into place after the work is completed. wind protection and reduce dust, sun glare, and reflected heat. Leave a space of several inches between the trellis and the wall. Vines add a vertical dimension to the desert landscape that is difficult to achieve with any other kind of plant. Vines can Self-climbing Vines – Masonry serve as a narrow space divider, a barrier, or a privacy screen. Some vines attach themselves to rough surfaces such as brick, Some vines also make good ground covers for steep banks, concrete, and stone by means of aerial rootlets or tendrils tipped driveway cuts, and planting beds too narrow for shrubs. -

54 Lab 05: Leaf Development in Pisum Sativum (Pea)
Lab 05: Leaf development in Pisum sativum (pea) Pea leaf mutants demonstrate the plasticity of leaf development. A change in one gene product results in the conversion of compound leaves to simple leaves (unifoliata-uni), the conversion of leaflets to tendrils (afila-af), tendrils to leaflets (tendril-less-tl), partial loss of stipules (reduced stipules-st), change in leaflet and stipule shape (sinuate leaf-sil), and crinkling of leaves due to loss of adaxial identity (crispa-cri). More detailed descriptions and pictures of each mutant can be found on the last page of this lab. To prepare for this lab, you need to read sections 4.16-4.18 in your book (Cronk, 2010). In this lab you will: -describe wild-type pea leaves -identify which genes are defective in a series of mutant plants -make predictions of the phenotypes of additional mutant combinations -make predictions of the effects of mutations in other plants -contrast pea mutants with other plants with compound leaves Characterizing mutants Obtain a pot with a wild-type pea plant to share with your table. In the space below, sketch one leaf, including its attachment to the stem. Include the petiole, rachis, stipules, the correct number of leaflets and tendrils. Label each part of the leaf. 54 We will typically have five single mutants, but this may vary year-to-year. Describe and illustrate the plant’s appearance (leaf phenotype) and attempt to determine which of the genes described in the introduction is mutated (genotype) in each case. When you are done, you may check your answers with your TA. -

Morphological Phylogenetics of Bignoniaceae Juss
beni-suef university journal of basic and applied sciences 3 (2014) 172e177 HOSTED BY Available online at www.sciencedirect.com ScienceDirect journal homepage: www.elsevier.com/locate/bjbas Full Length Article Morphological phylogenetics of Bignoniaceae Juss. * Usama K. Abdel-Hameed Ain Shams University, Faculty of Science, Botany Department, Abassia, Cairo, Egypt article info abstract Article history: The most recent classification of Bignoniaceae recognized seven tribes, Phylogenetic and Received 7 April 2014 monographic studies focusing on clades within Bignoniaceae had revised tribal and generic Received in revised form boundaries and species numbers for several groups, the portions of the family that remain 22 September 2014 most poorly known are the African and Asian groups. The goal of the present study is to Accepted 23 September 2014 identify the primary lineages of Bignoniaceae in Egypt based on macromorphological traits. Available online 4 November 2014 A total of 25 species of Bignoniaceae in Egypt was included in this study (Table 1), along with Barleria cristata as outgroup. Parsimony analyses were conducted using the program Keywords: NONA 1.6, preparation of data set matrices and phylogenetic tree editing were achieved in Cladistics WinClada Software. The obtained cladogram showed that within the studied taxa of Phylogeny Bignoniaceae there was support for eight lineages. The present study revealed that the two Morphology studied species of Tabebuia showed a strong support for monophyly as well as Tecoma and Monophyletic genera Kigelia. It was revealed that Bignonia, Markhamia and Parmentiera are not monophyletic Bignoniaceae genera. Copyright 2014, Beni-Suef University. Production and hosting by Elsevier B.V. All rights reserved. -
SPECIES IDENTIFICATION GUIDE National Plant Monitoring Scheme SPECIES IDENTIFICATION GUIDE
National Plant Monitoring Scheme SPECIES IDENTIFICATION GUIDE National Plant Monitoring Scheme SPECIES IDENTIFICATION GUIDE Contents White / Cream ................................ 2 Grasses ...................................... 130 Yellow ..........................................33 Rushes ....................................... 138 Red .............................................63 Sedges ....................................... 140 Pink ............................................66 Shrubs / Trees .............................. 148 Blue / Purple .................................83 Wood-rushes ................................ 154 Green / Brown ............................. 106 Indexes Aquatics ..................................... 118 Common name ............................. 155 Clubmosses ................................. 124 Scientific name ............................. 160 Ferns / Horsetails .......................... 125 Appendix .................................... 165 Key Traffic light system WF symbol R A G Species with the symbol G are For those recording at the generally easier to identify; Wildflower Level only. species with the symbol A may be harder to identify and additional information is provided, particularly on illustrations, to support you. Those with the symbol R may be confused with other species. In this instance distinguishing features are provided. Introduction This guide has been produced to help you identify the plants we would like you to record for the National Plant Monitoring Scheme. There is an index at -

Leaves and Their Modified Forms
L eaves and Their Modified Forms By GRACE L. MOORE, B. S. ’95 THESIS FOR THE DEGREE OF MASTER OF SCIENCE IN NATURAL SCIENCE IH THE UNIVERSITY OF ILLINOIS Presented June, 1900 UNIVERSITY OF ILLINOIS There is no longer a question as to the commom origin of the infinitely manifold forms of leaves but it is interesting to notice ho?/- great is the variation of these forms. This metamorphosis is exhibited in greatest diversity by leaves of phanerogams,in which various ho mologous structures have been distinguished as foliage leaves, scale leaves, floral leaves and seed leaves. But before one can recognize leaves as metamorphosed,it is necessary to be famil iar with the origin,form and function of the typical leaf. scales of winter buds, spines, tendrils, floral organs and parts of fruit capsules. In the lan guage of Kerner as translated by Oliver,"leaves are laterally developed members of limited growth,which spring in geometrical succession from the outer layers of tissue below the growing point of the stem." The typical leaf consists of three parts,lamina,petiole and stipules. The lamina is the green,expanded portion which makes up the greater part of the leaf;the petiole,the slender,cylindrical stem which supports the lamina; and the stipules, the two small,green,lateral appendages at the base of the petiole. The function of the leaf is threefold; assimilation, transpiration and respiration. The leaf of Cydonia Japónica furnishes a striking example of a typical leaf,with the parts in their proper proportion and serving their original functions. (Pi. -

Tendril Coiling in Grapevine: Jasmonates and a New Role for GABA?
Journal of Plant Growth Regulation https://doi.org/10.1007/s00344-018-9807-x Tendril Coiling in Grapevine: Jasmonates and a New Role for GABA? Jaiana Malabarba1,2 · Michael Reichelt3 · Giancarlo Pasquali1 · Axel Mithöfer2 Received: 31 January 2018 / Accepted: 9 April 2018 © The Author(s) 2018 Abstract Grapevine (Vitis vinifera L., Vitaceae) belongs to the genus Vitis, and is characterized as a vine due to the presence of ten- drils, which are located opposite to leaves. Tendrils are thigmo-responsive organs, able to carry out delicate mechanosensory responses upon touch and related stimuli. These organs are an adaptation of the plant to climb with the help of support to higher places and finally remain at a position with favorable light quality. In previous studies on Bryonia dioica (Cucur- bitaceae), phytohormones of the jasmonate class were identified as the endogenous hormone signals to initiate coiling of the tendrils. Strikingly, this is still the only example for jasmonate-induced tendril coiling. In grapevine, three compounds (12-oxo-phytodienoic acid, jasmonic acid (JA), and JA isoleucine conjugate) of the jasmonate class were found at higher concentrations in non-coiled tendrils when compared with coiled ones. Upon treatment with phytohormones, we could con- firm the activity of jasmonates on tendril coiling in grapevine. However, not jasmonates but a non-proteinogenic amino acid, γ-aminobutyric acid (GABA), was detected to accumulate in grapevine tendrils at significantly higher levels than in all other tissues, independent of their coiling status. For GABA we detected a significant, transient positive effect on tendril coiling. Use of a GABA synthesis blocker, 3-mercaptopropionic acid, caused reduced GABA- but not JA-induced coiling scores. -

Lab 6 Plants 2
Plants II Objectives: 1. Describe the life histories of cycads, conifers and angiosperms and indicate which is the dominant generation in each division. 2. Compare and contrast the gametophyte of a fern, a conifer and an angiosperm. 3. Give reasons why gymnosperms persisted, even though angiosperms became dominant. 4. Describe the adaptations present in angiosperms but not in gymnosperms that made angiosperms so successful. 5. List the important features that distinguish monocots and dicots. 6. Given a plant specimen or description, place it correctly in one of these groups: Coniferophyta, Cycadophyta, or Anthophyta. Introduction There are two divisions of plants that produce seeds – gymnosperms (“naked seed”) and angiosperms (“hidden seed”). Gymnosperms include the cycads, which resemble palm trees but have cones (Cycadophyta), Gingko (Gingkophyta), Gnetum and its relatives (Gnetophyta), and the familiar conifers (Coniferophyta). Angiosperms are placed in the division Anthophyta, which includes all flowering plants. These plants have solved the problem of reproducing on land by doing away with flagellated sperm altogether. The male spores are retained within the parent plant and develop into immature male gametophytes called pollen grains. These are resistant to dehydration and can be spread in large numbers by the wind. Additionally, the young sporophyte embryo does not develop into a mature sporophyte immediately but can survive as a dormant seed until environmental conditions are favorable. The production of pollen and seeds allowed these plants to reproduce in the absence of water and major reason for their success. Gymnosperms such as conifers have continued to survive in spite of the success of angiosperms because they are better adapted to poor, rocky soils and extreme cold. -

Carnivorous Plantsplants –– Classicclassic Perspectivesperspectives Andand Newnew Researchresearch
CarnivorousCarnivorous plantsplants –– classicclassic perspectivesperspectives andand newnew researchresearch Barry Rice The Nature Conservancy, Davis, USA The ranks of known carnivorous plants have grown to approximately 600 species. We are learning that the relationships between these feeders and their prey are more complex, and perhaps gentler, than previously suspected. Unfortunately, these extraordinary life forms are becoming extinct before we can even document them! Carnivorous plants are able to do four things: they attract, false signals, the trigger hairs must be bent, not once, but trap, digest and absorb animal life forms. While these four two or more times in rapid succession. In effect, the plant abilities may seem remarkable in combination, they are, can count! When the trap first closes, the lobes fit together individually, quite common in the plant kingdom. All very loosely, the marginal spines interweaving to form a plants that produce flowers for the purpose of summoning botanical jail. Prey items that are too small to be worth pollinators are already skilled at attracting animals. Many digesting can quickly escape, and the trap will reopen the plants trap animals at least temporarily, usually for the next day. But, large prey remain trapped, and their purposes of pollination. Digestion may seem odd, but all panicked motions continue to stimulate the trigger hairs. plants produce enzymes that have digestive capabilities – This encourages the traps to seal completely, suffocating carnivorous plants have only relocated the site of enzy- the prey, and to release digestive enzymes. (Children who matic activity to some external pitcher or leaf surface. feed dead flies to their pet Venus flytraps are often disap- Finally, absorption of nutrients is something that all pointed when, the next day, the uninterested plants open plants do (or, at least, all that survive past the cotyledon their traps and reject the inanimate morsels – only live stage). -

Climbing Plants: Attachment Adaptations and Bioinspired Innovations
Plant Cell Reports (2018) 37:565–574 https://doi.org/10.1007/s00299-017-2240-y REVIEW Climbing plants: attachment adaptations and bioinspired innovations Jason N. Burris1 · Scott C. Lenaghan2,3 · C. Neal Stewart Jr.1 Received: 30 June 2017 / Accepted: 22 November 2017 / Published online: 29 November 2017 © Springer-Verlag GmbH Germany, part of Springer Nature 2017 Abstract Climbing plants have unique adaptations to enable them to compete for sunlight, for which they invest minimal resources for vertical growth. Indeed, their stems bear relatively little weight, as they traverse their host substrates skyward. Climbers possess high tensile strength and flexibility, which allows them to utilize natural and manmade structures for support and growth. The climbing strategies of plants have intrigued scientists for centuries, yet our understanding about biochemical adaptations and their molecular undergirding is still in the early stages of research. Nonetheless, recent discoveries are promising, not only from a basic knowledge perspective, but also for bioinspired product development. Several adaptations, including nanoparticle and adhesive production will be reviewed, as well as practical translation of these adaptations to commercial applications. We will review the botanical literature on the modes of adaptation to climb, as well as specialized organs—and cellular innovations. Finally, recent molecular and biochemical data will be reviewed to assess the future needs and new directions for potential practical products that may be bioinspired by climbing plants. Keywords Nanoparticles · Tendrils · Hooks · Adhesion · Biomimicry · Engineering · Robotics For centuries, scientists have been intrigued by the special- Despite the prolonged fascination with climbing plants, ized adaptations of climbing plants that enable them to com- we know surprisingly little about the molecular biology, pete for resources such as sunlight (Niklas 2011). -

Physiology of Rapid Movements in Higher Plants
PHYSIOLOGY OF RAPID MOVEMENTS IN HIGHER PLANTS By TAKAO SIBAOKA Biolouicallnstitute, Faculty of Science Tohoku University, Sendai, Japan Among the various behaviors in higher plants, a peculiar one, that a part of the leaf or flower in certain plants shows very rapid movement upon stimulus, has invited the attention of a number of investigators since the beginning of botanical research. However, in spite of this long history of study, numerous fundamental aspects of the phenomena remain to be clari fied. Since the definition of the rapid movement is still unclear, discussion in this review will be restricted to three types of the movements: (a) rapid response in the pulvini of the mimosas; (b) shutting movement in the traps of two carnivores, Dionaea and Aldrovanda (an aquatic plant); and (c) visible movements in the stamen and pistil of some plants upon stimulus. This review is not intended to be a comprehensive resume of all published works on the movements. I intend to restrict my discussion to a consider ation of various results in an attempt to discover a general mechanism un derlying these movements, and will stress the relation between electrical re sponse and the movement. Several reviews and monographs have been published that approach this problem from various points of view (18, 19, 24, 42, 101, 103), including the author's own works (11, 71). In this review I will return to some of the important older literature which provides a basis for understanding the mechanism. PERCEPTION OF STIMULUS AND RESPONSE BEHAVIOR Dionaea and Aldrovanda.-Features of perception of stimulus and the process of response in these two carnivorous plants (3) are essentially simi lar to each other, though their form, size, and habitat are quite different. -

Basic Botany Presentation
Basic Botany Learning Objectives • Explain basic plant processes that affect plant growth. • Understand the classification system of botanical nomenclature. • Distinguish between monocot and true dicots/eudicots. • Recognize the basic parts of a plant, their functions, and specialized terms. • Understand how plant morphology helps us classify and identify plants. Part I: Introduction What is Botany? • The scientific study of plants… – classification – evolution – structure • internal structure = anatomy • external structure = morphology – physiology – ecology – uses • Also known as plant science or plant biology What is Horticulture? The art and science of cultivating plants, including ornamentals, fruit, and vegetables. What is a Science? • A study of something… • Must distinguish between the different parts • Must try to understand all the part’s functions • Need to understand the roles or influences the parts have on each other • Have the ability to manipulate the parts to change the whole • Horticulturist: a manipulator of nature. What is a Plant? • A photosynthetic, multicellular organism… – Containing photosynthetic pigments called chlorophylls – Capable of making its own food (sugar)… – …and storing it, usually in the form of starch Plant Processes • Photosynthesis – The process of turning light energy into carbohydrates that can be transported and stored by the plant 6 CO2 + 6 H2O + light → C6H12O6 (sugar) + 6 O2 (oxygen) Laura Guerin; Source: CK-12 Foundation; License: CC BY-NC 3.0 Plant Processes • Respiration – The process where