Aldo Pratelli Günter Leugering Editors New Trends in Shape Optimization
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Remembrances of My Career at Brown University 1958-1978
Remembrances of My Career at Brown University 1958-1978 Wendell H. Fleming Spring 2007 Wendell Fleming Remembrances Page 1 Table of Contents Introduction PART I, 1958-1968 1. First year at Brown, 1958-59 2. Teaching 3. Nature of mathematical research 4. Higher education in the 1960s 5. Brown Mathematics Department in the 1960s 6. Family life in the 1960s PART II, 1968-78 7. Sabbatical year 1968-69 8. Vietnam War years 9. Faculty Policy Group 1970-72 10. Mathematics Ph.D. employment crisis 11. Family life in the 1970s 12. Sabbatical year 1976-77 PART III, Research Contributions 13. Geometric measure theory 14. Stochastic control 15. Differential games 16. Measure valued stochastic processes 17. Stochastic control with partial state information 18. Small random perturbations Afterword Appendix A: Short Vita Appendix B: Ph.D. students Wendell Fleming Remembrances Page 2 Introduction I came to Brown University in 1958 and continued there as a faculty member until I retired from teaching in 1995. Brown provided an unusually congenial and stimulating environment for my teaching and research. I never regretted our decision in 1958 to accept an Assistant Professorship in the Mathematics Department, nor did I ever pursue seriously opportunities to move from Brown to another university in the years afterward. For convenience, these remembrances of my first 20 years at Brown are divided into several parts. Part I concerns the years from 1958-68 and Part II from 1968-1978. Part III concerns my research contributions during those 20 years. A brief Afterword mentions my later years at Brown and the years of retirement. -
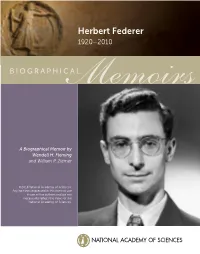
Herbert Federer 1920–2010
Herbert Federer 1920–2010 A Biographical Memoir by Wendell H. Fleming and William P. Ziemer ©2014National Academy of Sciences. Any opinions expressed in this memoir are those of the authors and do not necessarily reflect the views of the National Academy of Sciences. HERBERT FEDERER July 23, 1920–April 21, 2010 Elected to the NAS, 1975 Herbert Federer was born in Vienna, Austria, in 1920, immigrated to the United States in 1938, and became a naturalized citizen in 1944. Federer was a rather private person. In later years, he was reluctant to discuss with colleagues the painful memories of events related to his departure from Austria. For the rest of his life, he chose never to travel to Europe. Federer began his college education at a teachers college which later became the University of California, Santa Barbara. His exceptional mathematical talent was quickly recognized, and he soon transferred to the University of California, Berkeley. He received from Berkeley a B.A. in mathematics and physics in 1942 and his Ph.D in math- By Wendell H. Fleming ematics in 1944. During 1944 and 1945 Federer served in and William P. Ziemer the U.S. Army at the Ballistics Research Laboratory in Aber- deen, MD. Immediately after receiving an Army discharge, he joined the Department of Mathematics at Brown University, where he remained until his retirement in 1985. Another major event in Federer’s life was his marriage in 1949 to Leila Raines, who survives him at this writing. Mathematics and his family were Herb’s two great loves. He was devoted to his wife and their three children. -

Lecture Notes of the Unione Matematica Italiana
Lecture Notes of 3 the Unione Matematica Italiana Editorial Board Franco Brezzi (Editor in Chief) Persi Diaconis Dipartimento di Matematica Department of Statistics Università di Pavia Stanford University Via Ferrata 1 Stanford, CA 94305-4065, USA 27100 Pavia, Italy e-mail: [email protected], e-mail: [email protected] [email protected] John M. Ball Nicola Fusco Mathematical Institute Dipartimento di Matematica e Applicazioni 24-29 St Giles’ Università di Napoli “Federico II”, via Cintia Oxford OX1 3LB Complesso Universitario di Monte S. Angelo United Kingdom 80126 Napoli, Italy e-mail: [email protected] e-mail: [email protected] Alberto Bressan Carlos E. Kenig Department of Mathematics Department of Mathematics Penn State University University of Chicago University Park 1118 E 58th Street, University Avenue State College Chicago PA. 16802, USA IL 60637, USA e-mail: [email protected] e-mail: [email protected] Fabrizio Catanese Fulvio Ricci Mathematisches Institut Scuola Normale Superiore di Pisa Universitätstraße 30 Piazza dei Cavalieri 7 95447 Bayreuth, Germany 56126 Pisa, Italy e-mail: [email protected] e-mail: [email protected] Carlo Cercignani Gerard Van der Geer Dipartimento di Matematica Korteweg-de Vries Instituut Politecnico di Milano Universiteit van Amsterdam Piazza Leonardo da Vinci 32 Plantage Muidergracht 24 20133 Milano, Italy 1018 TV Amsterdam, The Netherlands e-mail: [email protected] e-mail: [email protected] Corrado De Concini Cédric Villani Dipartimento di Matematica Ecole Normale Supérieure de Lyon Università di Roma “La Sapienza” 46, allée d’Italie Piazzale Aldo Moro 2 69364 Lyon Cedex 07 00133 Roma, Italy France e-mail: [email protected] e-mail: [email protected] The Editorial Policy can be found at the back of the volume. -

Algebraic Topology, JAMES P
OTICES OF THE AMERICAN MATHEMATICAL SOCIETY Newton's Principia Read 300 Years Later page 1148 V. /. Arno/'d and V. A. Vasi/'ev 1989 Annual AMS-MAA Survey page 1155 Los Angeles Meeting (November 18-19) page 1225 NOVEMBER 1989, VOLUME 36, NUMBER 9 Providence, Rhode Island, USA ISSN 0002-9920 Calendar of AMS Meetings and Conferences This calendar lists all meetings which have been approved prior to Mathematical Society in the issue corresponding to that of the Notices the date this issue of Notices was sent to the press. The summer which contains the program of the meeting. Abstracts should be sub and annual meetings are joint meetings of the Mathematical Associ mitted on special forms which are available in many departments of ation of America and the American Mathematical Society. The meet mathematics and from the headquarters office of the Society. Ab ing dates which fall rather far in the future are subject to change; this stracts of papers to be presented at the meeting must be received is particularly true of meetings to which no numbers have been as at the headquarters of the Society in Providence, Rhode Island, on signed. Programs of the meetings will appear in the issues indicated or before the deadline given below for the meeting. Note that the below. First and supplementary announcements of the meetings will deadline for abstracts for consideration for presentation at special have appeared in earlier issues. sessions is usually three weeks earlier than that specified below. For Abstracts of papers presented at a meeting of the Society are pub additional information, consult the meeting announcements and the lished in the journal Abstracts of papers presented to the American list of organizers of special sessions. -

From the AMS, Volume 46, Number 10
from.qxp 9/23/99 3:59 PM Page 1252 From the AMS Bylaws of the ciety and delegate to such committees such powers as may be necessary or convenient for the proper exercise of American Mathematical those powers. Agents appointed, or members of commit- tees designated, by the Board of Trustees need not be Society members of the Board. Nothing herein contained shall be construed to em- Article I power the Board of Trustees to divest itself of responsi- bility for, or legal control of, the investments, properties, Officers and contracts of the Society. Section 1. There shall be a president, a president elect (during the even-numbered years only), an immediate past Article III president (during the odd-numbered years only), three vice Committees presidents, a secretary, four associate secretaries, a trea- Section 1. There shall be eight editorial committees as fol- surer, and an associate treasurer. Section 2. It shall be a duty of the president to deliver lows: committees for the Bulletin, for the Proceedings, for an address before the Society at the close of the term of the Colloquium Publications, for the Journal, for Mathe- office or within one year thereafter. matical Surveys and Monographs, for Mathematical Re- views; a joint committee for the Transactions and the Mem- Article II oirs; and a committee for Mathematics of Computation. Section 2. The size of each committee shall be deter- Board of Trustees mined by the Council. Section 1. There shall be a Board of Trustees consisting of eight trustees, five trustees elected by the Society in ac- Article IV cordance with Article VII, together with the president, the treasurer, and the associate treasurer of the Society ex of- Council ficio. -

A Criterion for Sets of Locally Finite Perimeter
A CRITERION FOR SETS OF LOCALLY FINITE PERIMETER A Thesis Presented by Heba Badri Bou Kaed Bey to The Faculty of Natural and Applied Sciences in Partial Fulfillment of the Requirements for the Degree of Master of Science in Mathematics Notre Dame University-Louaize Zouk Mosbeh, Lebanon April 2019 Copyright by Heba Badri Bou Kaed Bey 2019 Abstract of the Thesis A CRITERION FOR SETS OF LOCALLY FINITE PERIMETER by Heba Badri Bou Kaed Bey Master of Science in Mathematics Notre Dame University-Louaize, Zouk Mosbeh, Lebanon 2019 Geometric measure theory could be described as differential geom- etry, generalized through measure theory to deal with maps and surfaces that are not necessarily smooth, and applied to the calcu- lus of variations. Geometric measure theory is important because it studies sets, their variation and their boundaries (from the mea- sure theoretic sense). In particular, a very interesting branch in Geometric measure theory, is the sets of locally finite perimeter. Just as their name actually shows, these sets are essentially sets whose perimeter is (locally) finite. In this thesis we start by giving a formal definition for sets of locally finite perimeter. Moreover, we will use the Hausdorff measure ( just like the surface measure ) as a tool to give us the perimeter of the (measure theoretic) bound- aries of these sets. Then we will prove a criteria for sets of locally finite perimeter, which states that a set is of locally finite perime- ter, if and only if, (locally) the Hausdorff measure of its ( measure theoretic ) boundary is finite. To my parents. -

Compactness Theorem for Integral Currents
White’s Compactness Theorem for Integral Currents Menaka Lashitha Bandara Supervisors: Dr. Maria Athanassenas Prof. Robert Bartnik Assoc. Prof. Alan Pryde School of Mathematical Sciences, Monash University, Clayton, Victoria, Australia, 3168 16 October 2006 Acknowledgements I would like to firstly thank Dr. Maria Athanassenas for her great insights, wonderful remarks, and excellent supervision! Thank you so much! I’ve had an incredibly wonderfully honours year. Also, Prof. Robert Bartnik deserves much thanks for his assistance. His incredible ability to draw pictures from even the most complex of definitions is awe-inspiring! Without both these terrific individuals, I would not have been able to achieve so much in this thesis. Dr. Marty Ross also deserves much credit and praise. His excellent lectures in Measure Theory at the AMSI summer school provided me with a solid foundation to work from. If it was not for his excellent Real Analysis lectures in 2003, I may not have fallen so hard in love with Analysis. As a result of this thesis, I have disturbed both Assoc. Prof. Alan Pryde and Dr. Pengzi Miao many times. Thank you both for taking time with me. Last but not least, I would like to thank my parents. If it were not for their Food for Maths program, I would have been forced to waste more time cooking than proving. i Contents Introduction 1 1 Preliminaries 2 1.1 Hausdorff Measure . 2 1.2 Lipschitz Functions . 3 1.3 Rectifiability . 3 1.4 Gradients, Area, Co-area . 5 2 Currents, Varifolds, Densities and Slices 7 2.1 Forms and p-Vectors . -

Stochastic Analysis, Control, Optimization and Applications a Volume in Honor of W.H
Wendell H. Fleming Stochastic Analysis, Control, Optimization and Applications A Volume in Honor of W.H. Fleming William M. McEneaney, G. George Yin, and Qing Zhang Editors Springer-Science+Business Media, LLC William M. McEneaney G. George Yin Department of Mathematics Department of Mathematics North Carolina State University Wayne State University Raleigh, NC 27695 Detroit, MI 48202 Qing Zhang Department of Mathematics University of Georgia Athens, GA 30602 Library of Congress Cataloging-in-Publieatioii Data Stochastic analysis, control, optimization and applications : a volume in honor of W.H. Fleming / William McEneaney, G. George Yin, Qing Zhang, [editors], p. cm. Includes bibliographical references and index. ISBN 978-1-4612-7281-6 ISBN 978-1-4612-1784-8 (eBook) DOI 10.1007/978-1-4612-1784-8 1. Stochastic analysis. 2. Control theory. I. Fleming, Wendell Helms, 1928- . II. McEneaney, William. III. Yin, George, 1954- . IV. Zhang, Qing, 1959- QA274.2.S7718 1999 519.2—dc21 98-45990 CIP AMS Subject Classifications: 90,93 Printed on acid-free paper. © 1999 Springer Science+Business Media New York Originally published by Birkhäuser Boston in 1999 Softcover reprint of the hardcover 1st edition 1999 All rights reserved. This work may not be translated or copied in whole or in part without the written permission of the publisher, Springer-Science-+Business Media, LLC, except for brief excerpts in, connection with reviews or scholarly analysis. Use in connection with any form of information storage and retrieval, electronic adaptation, computer software, or by similar or dissimilar methodology now known or hereafter developed is forbidden. The use of general descriptive names, trade names, trademarks, etc., in this publication, even if the former are not especially identified, is not to be taken as a sign that such names, as understood by the Trade Marks and Merchandise Marks Act, may accordingly be used freely by anyone. -
Linear Algebraic Groups" by Homological Ideas
Calendar This Calendar lists all of the meetings which have been approved by the Council up to the date this issue of the c/{oticeiJ was sent to press. The summer and annual meetings are joint meetings of the Mathematical Association of America and the American Mathematical Society. The meeting dates which fall rather far in the future are subject to change; this is particularly true of meetings to which no numbers have yet been assigned. Abstracts should be submitted on special forms which are available in most departments of mathematics; forms can also be obtained by writing to the headquarters of the Society. Abstracts to be presented at the meeting in person must be received at the headquarters of the Society in Providence, Rhode Island, on or before the deadline for the meeting. Meeting Deadline for Abstracts* Number Date Place and News Items 726 August 18-22, 1975 Kalamazoo, Michigan June 17, 1975 (79th Summer Meeting) 727 October 25, 1975 Cambridge, Massachusetts Sept. 2, 1975 728 November 1, 1975 Chicago, illinois Sept. 2, 1975 729 November 7-8, 1975 Blacksburg, Virginia Sept. 23, 1975 730 November 15, 1975 Los Angeles, California Sept. 23, 1975 731 January 22-26, 1976 San Antonio, Texas Nov. 5, 1975 (82nd Annual Meeting) 732 March 4-5, 1976 Tallahassee, Florida 733 March 15-20, 1976 Urbana, Illinois 734 April 23-24, 1976 Reno, Nevada 735 June 18-19, 1976 Portland, Oregon November 19-20, 1976 Columbia, South Carolina November 26-27, 1976 Albuquerque, New Mexico January\27-31, 1977 St. Louls, Missouri (83rd jAnnual Meeting) *Deadline for abstracts not presented at a meeting (by title) August 1975 issue: June 10 October 1975 issues: August 26 November 1975 issue: September 16 OTHER EVENTS August 16-17, 1975 Short Course on Applied Combinatorics, Kalamazoo, Michigan Please &Ira: the peel-off label on these cJ{oticei) to correspondence with the Society concerning fi.scal matters, changes of addreM, promotions, or when placing orders for books and journals. -

Ennio De Giorgi Selected Papers Ennio De Giorgi (Courtesy of Foto Frassi, Pisa) Ennio De Giorgi Selected Papers
Ennio De Giorgi Selected Papers Ennio De Giorgi (Courtesy of Foto Frassi, Pisa) Ennio De Giorgi Selected Papers Published with the support of Unione Matematica Italiana and Scuola Normale Superiore ABC Editors Luigi Ambrosio Mario Miranda SNS, Pisa, Italy University of Trento, Italy Gianni Dal Maso Sergio Spagnolo SISSA, Trieste, Italy University of Pisa, Italy Marco Forti University of Pisa, Italy Library of Congress Control Number: 2005930439 ISBN-10 3-540-26169-9 Springer Berlin Heidelberg New York ISBN-13 978-3-540-26169-8 Springer Berlin Heidelberg New York This work is subject to copyright. All rights are reserved, whether the whole or part of the material is con- cerned, specifically the rights of translation, reprinting, reuse of illustrations, recitation, broadcasting, re- production on microfilm or in any other way, and storage in data banks. Duplication of this publication or parts thereof is permitted only under the provisions of the German Copyright Law of September 9, 1965,in its current version, and permission for use must always be obtained from Springer. Violations are liable for prosecution under the German Copyright Law. Springer is a part of Springer Science+Business Media springer.com c Springer-Verlag Berlin Heidelberg 2006 Printed in The Netherlands The use of general descriptive names, registered names, trademarks, etc. in this publication does not imply, even in the absence of a specific statement, that such names are exempt from the relevant protective laws and regulations and therefore free for general use. Typesetting: by the editors and TechBooks using a Springer LATEX macro package Cover design: Erich Kirchner, Heidelberg Printed on acid-free paper SPIN: 11372011 41/TechBooks 543210 Preface The project of publishing some selected papers by Ennio De Giorgi was under- taken by the Scuola Normale Superiore and the Unione Matematica Italiana in 2000.