Permanent Magnet Reluctance Actuators for Vibration Testing
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

University Physics 227N/232N Ch 27
Vector pointing OUT of page University Physics 227N/232N Ch 27: Inductors, towards Ch 28: AC Circuits Quiz and Homework This Week Dr. Todd Satogata (ODU/Jefferson Lab) [email protected] http://www.toddsatogata.net/2014-ODU Monday, March 31 2014 Happy Birthday to Jack Antonoff, Kate Micucci, Ewan McGregor, Christopher Walken, Carlo Rubbia (1984 Nobel), and Al Gore (2007 Nobel) (and Sin-Itiro Tomonaga and Rene Descartes and Johann Sebastian Bach too!) Prof. Satogata / Spring 2014 ODU University Physics 227N/232N 1 Testing for Rest of Semester § Past Exams § Full solutions promptly posted for review (done) § Quizzes § Similar to (but not exactly the same as) homework § Full solutions promptly posted for review § Future Exams (including comprehensive final) § I’ll provide copy of cheat sheet(s) at least one week in advance § Still no computer/cell phone/interwebz/Chegg/call-a-friend § Will only be homework/quiz/exam problems you have seen! • So no separate practice exam (you’ll have seen them all anyway) § Extra incentive to do/review/work through/understand homework § Reduces (some) of the panic of the (omg) comprehensive exam • But still tests your comprehensive knowledge of what we’ve done Prof. Satogata / Spring 2014 ODU University Physics 227N/232N 2 Review: Magnetism § Magnetism exerts a force on moving electric charges F~ = q~v B~ magnitude F = qvB sin ✓ § Direction follows⇥ right hand rule, perpendicular to both ~v and B~ § Be careful about the sign of the charge q § Magnetic fields also originate from moving electric charges § Electric currents create magnetic fields! § There are no individual magnetic “charges” § Magnetic field lines are always closed loops § Biot-Savart law: how a current creates a magnetic field: µ0 IdL~ rˆ 7 dB~ = ⇥ µ0 4⇡ 10− T m/A 4⇡ r2 ⌘ ⇥ − § Magnetic field field from an infinitely long line of current I § Field lines are right-hand circles around the line of current § Each field line has a constant magnetic field of µ I B = 0 2⇡r Prof. -

Power-Invariant Magnetic System Modeling
POWER-INVARIANT MAGNETIC SYSTEM MODELING A Dissertation by GUADALUPE GISELLE GONZALEZ DOMINGUEZ Submitted to the Office of Graduate Studies of Texas A&M University in partial fulfillment of the requirements for the degree of DOCTOR OF PHILOSOPHY August 2011 Major Subject: Electrical Engineering Power-Invariant Magnetic System Modeling Copyright 2011 Guadalupe Giselle González Domínguez POWER-INVARIANT MAGNETIC SYSTEM MODELING A Dissertation by GUADALUPE GISELLE GONZALEZ DOMINGUEZ Submitted to the Office of Graduate Studies of Texas A&M University in partial fulfillment of the requirements for the degree of DOCTOR OF PHILOSOPHY Approved by: Chair of Committee, Mehrdad Ehsani Committee Members, Karen Butler-Purry Shankar Bhattacharyya Reza Langari Head of Department, Costas Georghiades August 2011 Major Subject: Electrical Engineering iii ABSTRACT Power-Invariant Magnetic System Modeling. (August 2011) Guadalupe Giselle González Domínguez, B.S., Universidad Tecnológica de Panamá Chair of Advisory Committee: Dr. Mehrdad Ehsani In all energy systems, the parameters necessary to calculate power are the same in functionality: an effort or force needed to create a movement in an object and a flow or rate at which the object moves. Therefore, the power equation can generalized as a function of these two parameters: effort and flow, P = effort × flow. Analyzing various power transfer media this is true for at least three regimes: electrical, mechanical and hydraulic but not for magnetic. This implies that the conventional magnetic system model (the reluctance model) requires modifications in order to be consistent with other energy system models. Even further, performing a comprehensive comparison among the systems, each system’s model includes an effort quantity, a flow quantity and three passive elements used to establish the amount of energy that is stored or dissipated as heat. -

Transient Simulation of Magnetic Circuits Using the Permeance-Capacitance Analogy
Transient Simulation of Magnetic Circuits Using the Permeance-Capacitance Analogy Jost Allmeling Wolfgang Hammer John Schonberger¨ Plexim GmbH Plexim GmbH TridonicAtco Schweiz AG Technoparkstrasse 1 Technoparkstrasse 1 Obere Allmeind 2 8005 Zurich, Switzerland 8005 Zurich, Switzerland 8755 Ennenda, Switzerland Email: [email protected] Email: [email protected] Email: [email protected] Abstract—When modeling magnetic components, the R1 Lσ1 Lσ2 R2 permeance-capacitance analogy avoids the drawbacks of traditional equivalent circuits models. The magnetic circuit structure is easily derived from the core geometry, and the Ideal Transformer Lm Rfe energy relationship between electrical and magnetic domain N1:N2 is preserved. Non-linear core materials can be modeled with variable permeances, enabling the implementation of arbitrary saturation and hysteresis functions. Frequency-dependent losses can be realized with resistors in the magnetic circuit. Fig. 1. Transformer implementation with coupled inductors The magnetic domain has been implemented in the simulation software PLECS. To avoid numerical integration errors, Kirch- hoff’s current law must be applied to both the magnetic flux and circuit, in which inductances represent magnetic flux paths the flux-rate when solving the circuit equations. and losses incur at resistors. Magnetic coupling between I. INTRODUCTION windings is realized either with mutual inductances or with ideal transformers. Inductors and transformers are key components in modern power electronic circuits. Compared to other passive com- Using coupled inductors, magnetic components can be ponents they are difficult to model due to the non-linear implemented in any circuit simulator since only electrical behavior of magnetic core materials and the complex structure components are required. -

Reluctance Network Analysis for Complex Coupled Inductors
Journal of Power and Energy Engineering, 2017, 5, 1-14 http://www.scirp.org/journal/jpee ISSN Online: 2327-5901 ISSN Print: 2327-588X Reluctance Network Analysis for Complex Coupled Inductors Jyrki Penttonen1,2*, Muhammad Shafiq2, Matti Lehtonen1 1Department of Electrical Engineering, Aalto University, Espoo, Finland 2Vensum Ltd., Helsinki, Finland How to cite this paper: Penttonen, J., Abstract Shafiq, M. and Lehtonen, M. (2017) Reluc- tance Network Analysis for Complex The use of reluctance networks has been a conventional practice to analyze Coupled Inductors. Journal of Power and transformer structures. Basic transformer structures can be well analyzed Energy Engineering, 5, 1-14. by using the magnetic-electric analogues discovered by Heaviside in the 19th http://dx.doi.org/10.4236/jpee.2017.51001 century. However, as power transformer structures are getting more complex Received: December 16, 2016 today, it has been recognized that changing transformer structures cannot be Accepted: January 7, 2017 accurately analyzed using the current reluctance network methods. This paper Published: January 10, 2017 presents a novel method in which the magnetic reluctance network or arbi- Copyright © 2017 by authors and trary complexity and the surrounding electrical networks can be analyzed as a Scientific Research Publishing Inc. single network. The method presented provides a straightforward mapping This work is licensed under the Creative table for systematically linking the electric lumped elements to magnetic cir- Commons Attribution International License (CC BY 4.0). cuit elements. The methodology is validated by analyzing several practical http://creativecommons.org/licenses/by/4.0/ transformer structures. The proposed method allows the analysis of coupled Open Access inductor of any complexity, linear or non-linear. -

Correlation of the Magnetic and Mechanical Properties of Steel
. CORRELATION OF THE MAGNETIC AND MECHANICAL PROPERTIES OF STEEL By Charles W. Burrows CONTENTS Page I. Purpose and scoph op paper 173 II. Relation op the magnetic to the other characteristics op steel. 175 III. Magnetic behavior op steel under the inpluence op mechanical STRESS 182 1 Resimie of early work 182 2. For stresses below the elastic limit 184 3. For stresses greater than the elastic limit 188 (a) Experiments of Fraichet 189 IV. Inhomogeneities and plaws 200 I. Inhomogeneities in steel rails 203 T. Conclusions 207 VI. Bibliography 209 I. PURPOSE AND SCOPE OF PAPER So much work on this subject has been done during the last few years that the prospects are very bright that a magnetic examination of steel will furnish information of practical value as to its fitness for mechanical uses, without at the same time injuring or destroying the specimen imder test. This paper is a review of the work done in correlating the mag- netic and mechanical properties of steel. The International Association for Testing Materials has designated this as one of the important problems of to-day and has assigned its investi- gation to a special committee. A number of investigators are actively engaged on this problem. Among the mechanical properties that have been studied in connection with the magnetic characteristics are hardness, toughness, elasticity, tensile strength, and resistance to repeated stresses. The well-known fact that not only do these various properties depend upon the chemical composition and the heat 173 174 Bulletin of the Bureau of Standards {Voi.13 treatment, but that frequently very slight changes in the chemical composition or the heat treatment produce very appreciable effects on the magnetic and mechanical properties complicates the problem considerably. -
Magnetic Circuit and Reluctance (How Do We Calculate Magnetic Field Or
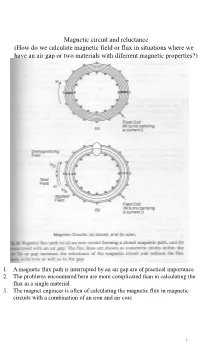
Magnetic circuit and reluctance (How do we calculate magnetic field or flux in situations where we have an air gap or two materials with diferrent magnetic properties?) 1. A magnetic flux path is interrupted by an air gap are of practical importance. 2. The problems encountered here are more complicated than in calculating the flux in a single material. 3. The magnet engineer is often of calculating the magnetic flux in magnetic circuits with a combination of an iron and air core 1 (i) In closed circuit case ( a ring of iron is wound with N turns of a solenoid which carries a current i) Ni N : Turns Magnetic field H L L : The average length of the ring Flux density passing → Ampere’s law → Ni H dl B μo(H M) circuit in the ring path Ni B μ ( M) Ni HL (B μH) o L B Ni L B B L μ Ni M L μo μ We can define here the magnetomotive N: the number of turns i: the current flowing in the force η which for a solenoid is Ni solenoid A magnetic analogue of flow Ohm’s law We can formulate a general : magnetic flux equation relating the Rm magnetic flux Rm : magnetic relutcance V i i R V Rm R 2 If the iron ring has cross-section area A(m²) permeability μ Turns of solenoid N length L Starting from the B A H A - The term L/μA is the relationship between Ni magnetic reluctance of A path. flux, magnetic induction L and magnetic field Ni - Magnetic reluctance is L series in a magnetic A circuit may be added is analogous to L R R m A A 1 3 Magnetic circuit Electrical circuit magnetomotive force electromotive force Flux () Current (i) reluctance resistance l l Reluctance Resistance R A A 1 Reluctivity Resistivity 1 conductivity permeability (ii) In open circuit case • If the air gap is small, there will be little leakage of the flux at the gap, but B = μH can no longer apply since the μ of air and the iron ring are different. -

Fundamentals of Magnetics
Chapter 1 Fundamentals of Magnetics Copyright © 2004 by Marcel Dekker, Inc. All Rights Reserved. Introduction Considerable difficulty is encountered in mastering the field of magnetics because of the use of so many different systems of units - the centimeter-gram-second (cgs) system, the meter-kilogram-second (mks) system, and the mixed English units system. Magnetics can be treated in a simple way by using the cgs system. There always seems to be one exception to every rule and that is permeability. Magnetic Properties in Free Space A long wire with a dc current, I, flowing through it, produces a circulatory magnetizing force, H, and a magnetic field, B, around the conductor, as shown in Figure 1-1, where the relationship is: B = fi0H, [gauss] 1H = ^—, [oersteds] H B =— , [gauss] m cmT Figure 1-1. A Magnetic Field Generated by a Current Carrying Conductor. The direction of the line of flux around a straight conductor may be determined by using the "right hand rule" as follows: When the conductor is grasped with the right hand, so that the thumb points in the direction of the current flow, the fingers point in the direction of the magnetic lines of force. This is based on so-called conventional current flow, not the electron flow. When a current is passed through the wire in one direction, as shown in Figure l-2(a), the needle in the compass will point in one direction. When the current in the wire is reversed, as in Figure l-2(b), the needle will also reverse direction. This shows that the magnetic field has polarity and that, when the current I, is reversed, the magnetizing force, H, will follow the current reversals. -

The Study of Magnetic Circuits Is Important in the Study of Energy
MAGNETIC CIRCUITS The study of magnetic circuits is important in the study of energy systems since the operation of key components such as transformers and rotating machines (DC machines, induction machines, synchronous machines) can be characterized efficiently using magnetic circuits. Magnetic circuits, which characterize the behavior of the magnetic fields within a given device or set of devices, can be analyzed using the circuit analysis techniques defined for electric circuits. The quantities of interest in a magnetic circuit are the vector magnetic field H (A/m), the vector magnetic flux density B (T = Wb/m2) and the total magnetic flux Rm (Wb). The vector magnetic field and vector magnetic flux density are related by where : is defined as the total permeability (H/m), :r is the relative !7 permeability (unitless), and :o = 4B×10 H/m is the permeability of free space. The total magnetic flux through a given surface S is found by integrating the normal component of the magnetic flux density over the surface where the vector differential surface is given by ds = an ds and where an defines a unit vector normal to the surface S. The relative permeability is a measure of how much magnetization occurs within the material. There is no magnetization in free space (vacuum) and negligible magnetization in common conductors such as copper and aluminum. These materials are characterized by a relative permeability of unity (:r =1). There are certain magnetic materials with very high relative permeabilities that are commonly found in components of energy systems. These materials (iron, steel, nickel, cobalt, etc.), designated as ferromagnetic materials, are characterized by significant magnetization. -

Gyrator Capacitor Modeling Approach to Study the Impact of Geomagnetically Induced Current on Single-Phase Core Transformer
University of Tennessee, Knoxville TRACE: Tennessee Research and Creative Exchange Masters Theses Graduate School 5-2017 Gyrator Capacitor Modeling Approach to Study the Impact of Geomagnetically Induced Current on Single-Phase Core Transformer Parul Kaushal University of Tennessee, Knoxville, [email protected] Follow this and additional works at: https://trace.tennessee.edu/utk_gradthes Recommended Citation Kaushal, Parul, "Gyrator Capacitor Modeling Approach to Study the Impact of Geomagnetically Induced Current on Single-Phase Core Transformer. " Master's Thesis, University of Tennessee, 2017. https://trace.tennessee.edu/utk_gradthes/4752 This Thesis is brought to you for free and open access by the Graduate School at TRACE: Tennessee Research and Creative Exchange. It has been accepted for inclusion in Masters Theses by an authorized administrator of TRACE: Tennessee Research and Creative Exchange. For more information, please contact [email protected]. To the Graduate Council: I am submitting herewith a thesis written by Parul Kaushal entitled "Gyrator Capacitor Modeling Approach to Study the Impact of Geomagnetically Induced Current on Single-Phase Core Transformer." I have examined the final electronic copy of this thesis for form and content and recommend that it be accepted in partial fulfillment of the equirr ements for the degree of Master of Science, with a major in Electrical Engineering. Syed Kamrul Islam, Major Professor We have read this thesis and recommend its acceptance: Yilu Liu, Benjamin J. Blalock Accepted for the Council: Dixie L. Thompson Vice Provost and Dean of the Graduate School (Original signatures are on file with official studentecor r ds.) Gyrator-Capacitor Modeling Approach to Study the Impact of Geomagnetically Induced Current on Single-Phase Core Transformer A Thesis Presented for the Master of Science Degree The University of Tennessee, Knoxville Parul Kaushal May 2017 Copyright © 2017 by Parul Kaushal All rights reserved. -

Air Gap Elimination in Permanent Magnet Machines
AIR GAP ELIMINATION IN PERMANENT MAGNET MACHINES By Andy Judge A Dissertation Submitted to the Faculty of the WORCESTER POLYTECHNIC INSTITUTE In partial fulfillment of the requirements for the Degree of Doctor of Philosophy In Mechanical Engineering by _________________________________________________________ March 2012 APPROVED: _________________________________________________________ Dr. James D. Van de Ven, Advisor _________________________________________________________ Dr. Cosme Furlong-Vazquez, Committee Member _________________________________________________________ Dr. Alexander E. Emanuel, Committee Member _________________________________________________________ Dr. Eben C. Cobb, Committee Member _________________________________________________________ Dr. David J. Olinger, Graduate Committee Representative ABSTRACT In traditional Permanent Magnet Machines, such as electric motors and generators, power is transmitted by magnetic flux passing through an air gap, which has a very low magnetic permeability, limiting performance. However, reducing the air gap through traditional means carries risks in manufacturing, with tight tolerances and associated costs, and reliability, with thermal and dynamic effects requiring adequate clearance. Using a magnetically permeable, high dielectric strength material has the potential to improve magnetic performance, while at the same time offering performance advantages in heat transfer. Ferrofluids were studied as a method for improved permeability in the rotor / stator gap with a combined -

Co Simulation of Electric and Magnetic Circuits
Session 3632 Co-simulation of Electric and Magnetic Circuits James H. Spreen Indiana Institute of Technology, Ft. Wayne, IN Abstract: This paper reviews magnetic circuit models of magnetic structures, developed as analogs of electric resistor networks. It demonstrates magnetic simulation by circuit simulation of a magnetic circuit representing a three-winding magnetic structure, using known winding currents to calculate magnetic fluxes. Simultaneous simulation of both a magnetic circuit representing a magnetic structure and electric circuits connected to the windings eliminates the need to specify winding currents as known independent sources. This technique is here termed "co-simulation" for brevity. The controlled sources and auxiliary circuits necessary to implement co-simulation are arranged with winding turns as factors in controlled sources, to allow easy adaptation for different windings. Co-simulation is illustrated using the same three- winding structure used in the magnetic simulation, with a pulse input to one winding and a resistive load on the other two windings. The results of this co-simulation are compared to an electric circuit simulation in which the magnetic structure is described with three self inductances and three coupling coefficients. Extensions of co-simulation to account for nonlinear magnetic core behavior and core loss are described. I. Introduction A convenient point of introduction of magnetic circuit analysis is to note an analogy1,2 which can be established between magnetic and electric quantities. Specifically, magnetic potential or magnetomotive force ℑ (mmf) is represented by electric potential v or electromotive force (emf), magnetic flux φ is represented by electric current i, and magnetic reluctance ℜ is represented by electrical resistance R. -
LECTURE 27 Basic Magnetic's Issues in Transformers A. Overview B
1 LECTURE 27 Basic Magnetic’s Issues in Transformers A. Overview 1. General Comments on Transformer Inductance’s Lm and Ll(leakage) as well as Transformer winding resistance’s 2. Core Materials and Their Available Geometric Shapes a. Transformer core materials b. Available Core Shapes B. Core Flux Paths:Pbm. 12.3 of Erickson C. Electrical Models of Transformers 1. Overview of the Model Elements 2. Ideal Transformer versus Real Transformers with Ll(leakage) and Lm (magnetizing) Effects via understanding MMF Sources a. Ideal Case and magnetizing Lm b. Leakage Inductance: Ll c. Minimizing Ll d. Ll(primary) vs Ll(secondary) D. Eddy Current Effects in OTHER non-ferrite high frequency Transformers 2 LECTURE 27 Basic Magnetic’s Issues in Transformers A. Overview 1. General Comments on Transformer Inductance’s Lm and Ll(leakage) as well as Transformer resistance’s The magnetic’s issues in transformers involve one core and several sets of current carrying coils wound around the core. The generation of the magnetic flux inside the core by one set of current carrying coils and the transmission of the flux throughout the core is the first step in transformer action. The magnetization flux is created via a magnetizing inductance, Lm, which is placed in the primary of the transformer. Placement of auxiliary coils on the same core, that are subsequently subjected to the same flux or a portion of it generated by the primary coils, will generate induced voltages in the auxiliary coils. The core is fully specified by the manufacturers in terms of its magnetic properties. The permeability value will reveal how much of the core flux is in the interior of the core and how much flux leaks into the region outside the core.