System Design for Telecommunication Gateways
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Intel® Quick Sync Video Technology Guide
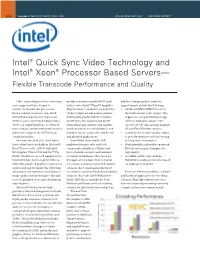
WP80 Superguide 3: THE CLOUD VIDEO SUPERGUIDE JANUARY/FEBRUARY 2015 SPONSORED CONTENT Intel® Quick Sync Video Technology and Intel® Xeon® Processor Based Servers— Flexible Transcode Performance and Quality Video transcoding involves converting provides enterprise-quality HEVC and and boost image quality. Some key one compressed video format to audio codecs, Intel® VTune™ Amplifier improvements include the following: another. In the past this process has XE performance analysis tools and Video • Additional JPEG/MJPEG decode in been a compute-intensive task which Quality Caliper stream quality analyzer. the multi-format codec engine. This demanded a large amount of precious Additionally, product family members, support is on top of existing energy- CPU resources. Intel® Quick Synch Video Intel® Video Pro Analyzer and Intel® efficient, high-performance AVC (QSV) can enable hardware-accelerated Stress Bitstreams and Encoder bundles encode/decode that sustains multiple transcoding to deliver better performance enable production–scale validation and 4K and Ultra HD video streams. than transcoding on the CPU without debug of encode, transcode, and decode • A dedicated new video quality engine sacrificing quality. and playback applications. to provide extensive video processing First introduced in 2011, Intel Quick Intel Media Server Studio SDK at low power consumption Sync technology is available in the Intel® implements many codec and tools • Programmable and media-optimized Xeon® Processor E3-1200 v3 with Intel components initially in software, and EU (execution units)/samplers for HD Graphics P4600/4700 and Iris™ Pro later as hybrid (software and hardware) high quality P5200. (From here on, we’ll simply refer to or entirely in hardware. -
ECE 435 – Network Engineering Lecture 15
ECE 435 { Network Engineering Lecture 15 Vince Weaver http://web.eece.maine.edu/~vweaver [email protected] 25 March 2021 Announcements • Note, this lecture has no video recorded due to problems with UMaine zoom authentication at class start time • HW#6 graded • Don't forget HW#7 • Project Topics due 1 RFC791 Post-it-Note Internet Protocol Datagram RFC791 Source Destination If other than version 4, Version attach form RFC 2460. Type of Service Precedence high reliability Routine Fragmentation Offset high throughput Priority Transport layer use only low delay Immediate Flash more to follow Protocol Flash Override do not fragment CRITIC/ECP this bit intentionally left blank TCP Internetwork Control UDP Network Control Other _________ Identifier _______________________ Length Header Length Data Print legibly and press hard. You are making up to 255 copies. _________________________________________________ _________________________________________________ _________________________________________________ Time to Live Options _________________________________________________ Do not write _________________________________________________ in this space. _________________________________________________ _________________________________________________ Header Checksum _________________________________________________ _________________________________________________ for more info, check IPv4 specifications at http://www.ietf.org/rfc/rfc0791.txt 2 HW#6 Review • Header: 0x000e: 4500 = version(4), header length(5)=20 bytes ToS=0 0x0010: 0038 = packet length (56 bytes) 0x0012: 572a = identifier 0x0014: 4000 = fragment 0100 0000 0000 0000 = do not fragment, offset 0 0x0016: 40 = TTL = 64 0x0017: 06 = Upper layer protocol (6=TCP) 0x0018: 69cc = checksum 0x001a: c0a80833 = source IP 192.168.8.51 0x001e: 826f2e7f = dest IP 130.111.46.127 • Valid IPs 3 ◦ 123.267.67.44 = N ◦ 8.8.8.8 = Y ◦ 3232237569 = 192.168.8.1 ◦ 0xc0a80801 = 192.168.8.1 • A class-A allocation is roughly 224=232 which is 0.39% • 192.168.13.0/24. -

Storage Area Networks Windows 2000 and Windows Server 2003
Server Clusters : Storage Area Networks Windows 2000 and Windows Server 2003 Microsoft Corporation Published: March 2003 Abstract This document describes what storage area networks (SAN) are, how server clusters can be deployed in a SAN, and how the Microsoft® Windows® platform, and Windows clustering in particular, take advantage of storage area network technology. Microsoft® Windows® Server 2003 Technical Article The information contained in this document represents the current view of Microsoft Corporation on the issues discussed as of the date of publication. Because Microsoft must respond to changing market conditions, it should not be interpreted to be a commitment on the part of Microsoft, and Microsoft cannot guarantee the accuracy of any information presented after the date of publication. This document is for informational purposes only. MICROSOFT MAKES NO WARRANTIES, EXPRESS OR IMPLIED, AS TO THE INFORMATION IN THIS DOCUMENT. Complying with all applicable copyright laws is the responsibility of the user. Without limiting the rights under copyright, no part of this document may be reproduced, stored in or introduced into a retrieval system, or transmitted in any form or by any means (electronic, mechanical, photocopying, recording, or otherwise), or for any purpose, without the express written permission of Microsoft Corporation. Microsoft may have patents, patent applications, trademarks, copyrights, or other intellectual property rights covering subject matter in this document. Except as expressly provided in any written license agreement from Microsoft, the furnishing of this document does not give you any license to these patents, trademarks, copyrights, or other intellectual property. © 2003. Microsoft Corporation. All rights reserved. Microsoft, Windows, Windows NT, SQL Server, and the Windows logo are either registered trademarks or trademarks of Microsoft Corporation in the United States and/or other countries. -

GPU Developments 2018
GPU Developments 2018 2018 GPU Developments 2018 © Copyright Jon Peddie Research 2019. All rights reserved. Reproduction in whole or in part is prohibited without written permission from Jon Peddie Research. This report is the property of Jon Peddie Research (JPR) and made available to a restricted number of clients only upon these terms and conditions. Agreement not to copy or disclose. This report and all future reports or other materials provided by JPR pursuant to this subscription (collectively, “Reports”) are protected by: (i) federal copyright, pursuant to the Copyright Act of 1976; and (ii) the nondisclosure provisions set forth immediately following. License, exclusive use, and agreement not to disclose. Reports are the trade secret property exclusively of JPR and are made available to a restricted number of clients, for their exclusive use and only upon the following terms and conditions. JPR grants site-wide license to read and utilize the information in the Reports, exclusively to the initial subscriber to the Reports, its subsidiaries, divisions, and employees (collectively, “Subscriber”). The Reports shall, at all times, be treated by Subscriber as proprietary and confidential documents, for internal use only. Subscriber agrees that it will not reproduce for or share any of the material in the Reports (“Material”) with any entity or individual other than Subscriber (“Shared Third Party”) (collectively, “Share” or “Sharing”), without the advance written permission of JPR. Subscriber shall be liable for any breach of this agreement and shall be subject to cancellation of its subscription to Reports. Without limiting this liability, Subscriber shall be liable for any damages suffered by JPR as a result of any Sharing of any Material, without advance written permission of JPR. -

CTL RFP Proposal
State of Maine Department of Education in coordination with the National Association of State Procurement Officials PROPOSAL COVER PAGE RFP # 201210412 MULTI-STATE LEARNING TECHNOLOGY INITIATIVE Bidder’s Organization Name: CTL Chief Executive - Name/Title: Erik Stromquist / COO Tel: 800.642.3087 x 212 Fax: 503.641.5586 E-mail: [email protected] Headquarters Street Address: 3460 NW Industrial St. Headquarters City/State/Zip: Portland, OR 97210 (provide information requested below if different from above) Lead Point of Contact for Proposal - Name/Title: Michael Mahanay / GM, Sales & Marketing Tel: 800.642.3087 x 205 Fax: 503.641.5586 E-mail: [email protected] Street Address: 3460 NW Industrial St. City/State/Zip: Portland, OR 97219 Proposed Cost: $294/yr. The proposed cost listed above is for reference purposes only, not evaluation purposes. In the event that the cost noted above does not match the Bidder’s detailed cost proposal documents, then the information on the cost proposal documents will take precedence. This proposal and the pricing structure contained herein will remain firm for a period of 180 days from the date and time of the bid opening. No personnel on the multi-state Sourcing Team or any other involved state agency participated, either directly or indirectly, in any activities relating to the preparation of the Bidder’s proposal. No attempt has been made or will be made by the Bidder to induce any other person or firm to submit or not to submit a proposal. The undersigned is authorized to enter into contractual obligations on behalf of the above-named organization. -

Mass-Producing Your Certified Cluster Solutions
Mass-Producing Your Certified Cluster Solutions White Paper The Intel® Cluster Ready program is designed to help you make the most of your engineering Intel® Cluster Ready resources. The program enables you to sell several different types of clusters from each solution High-Performance you design, by varying the hardware while maintaining the same software stack. You can gain a Computing broader range of cluster products to sell without engineering each one “from scratch.” As long as the software stack remains the same and works on each one of the hardware configurations, you can be confident that your clusters will interoperate with registered Intel Cluster Ready applications. Your customers can purchase your clusters with that same confidence, knowing they’ll be able to get their applications up and running quickly on your systems. Intel® Cluster Ready: Mass-Producing Your Certified Cluster Solutions Table of Contents Overview of Production-Related Activities � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � 3 Creating and certifying recipes � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � 3 Maintaining recipes � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � 3 Mass-producing recipes � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � -

Intel Announces X25-V 40GB Solid-State Drive for $125 15 March 2010
Intel Announces X25-V 40GB Solid-State Drive for $125 15 March 2010 applications and their favorite gaming application, such as Dragon Age: Origins, and experience up to 43 percent faster overall system performance or 86 percent improvement in their gaming experience. The SSD also speeds operations such as system start up, the opening of applications and files or resuming from standby. The Intel X25-V SSD The Intel X25-V features 40GB of 34nm NAND flash memory. This non-volatile memory retains data, even when the power is turned off, and is used in applications such as smartphones, Intel Corp. announced today a new addition to its personal music players, memory cards or SSDs for award-winning lineup of high-performance solid- fast and reliable storage of data. SSD benefits over state drives (SSDs): the Intel X25-V Value SATA a traditional HDD include higher performance, SSD. Priced at $125, the 40 gigabyte (GB) drive is battery saving and ruggedness. "Adding the Intel aimed at value segment netbooks and dual- X25-V to our existing family of high-performance drive/boot drive desktop set-ups to offer users the SSDs gives our resellers a full range of high- performance and reliability advantages of solid- performing, quality SSDs for notebook upgrades, state computing at an affordable, entry-level price. dual-drive desktop set ups or embedded applications," said Pete Hazen, director of SSDs can replace or coexist with traditional hard marketing for the Intel NAND Solutions Group. disk drives (HDDs). With no movable parts or spinning platters, SSDs are more reliable and The 40GB Intel X25-V complements Intel's higher higher performing than HDDs. -

ISS 2016 Bootcamp: Intel Omni-Path Architecture
Intel® Scalable System Framework A Configurable Design Philosophy Extensible to a Wide Range of Workloads Small Clusters Through Supercomputers Compute Memory/Storage Compute and Data-Centric Computing Fabric Software Standards-Based Programmability Intel Silicon On-Premise and Cloud-Based Photonics Intel® Xeon® Processors Intel® Solutions for Lustre* Intel® Omni-Path Architecture HPC System Software Stack Intel® Xeon Phi™ Processors Intel® SSDs Intel® True Scale Fabric Intel® Software Tools Intel® Xeon Phi™ Coprocessors Intel® Optane™ Technology Intel® Ethernet Intel® Cluster Ready Program Intel® Server Boards and Platforms 3D XPoint™ Technology Intel® Silicon Photonics Intel® Visualization Toolkit 1 YANG YANGUO May 2016 Intel Confidential Agenda Quick Overview: HPC Fabrics What is Intel® 100Gb Omni-Path Architecture(OPA)? Why is Intel 100Gb OPA Summary Intel® Solutions Summit 2016 Intel Confidential 3 Intel Confidential What is Different Between Networks and Fabrics? Network: Universal interconnect designed to HPC Fabric: Optimized interconnect allows allow any-and-all systems to communicate many nodes to perform as a single system Intel® Omni-Path Architecture or Infiniband Key NETWORK (Ethernet) Attributes: Key FABRIC Attributes: . Flexibility for any application . Targeted for specific applications . Designed for universal communication . Optimized for performance and efficiency . Extensible configuration . Engineered topologies . Multi-vendor components . Single-vendor solutions Intel® Solutions Summit 2016 Intel Confidential 5 Fabric: InfiniBand* and OPA InfiniBand/OPA is a multi-lane, high-speed serial interconnect (Copper or Fiber) . Typically presented as a 4x solution . Speeds: 40Gb/s (M & Intel QDR), 56Gb/s (M FDR), 100Gb/s (EDR & Intel OPA) High bandwidth, low latency HPC interconnect for commodity servers . Ethernet switch latency is typically measured in μs, but InfiniBand/OPA is in nanoseconds . -

Career Center Annual Report
CAREER CENTER ANNUAL REPORT 2019–2020 th Best Return on 5Investment 1 73 % Students Utilized Mines % Career Services 95 Positive Outcomes Rate2,3 IN A YEAR OF UNPRECEDENTED CHALLENGES, 1,200 Organizations THE STUDENTS, FACULTY, AND STAFF OF Recruited or MINES HAVE RISEN TO THE OCCASION, Hired at Mines REFLECTING THE INDOMITABLE OREDIGGER SPIRIT OF RESILIENCE THAT IS AT THE HEART OF THE MINES EXPERIENCE. THE CAREER Average CENTER HAS BEEN NIMBLE IN ADAPTING TO Starting $ Salary 3 NEW CIRCUMSTANCES AND CHANGING NEEDS. k 1 Among public universities nationwide 2 Employed79 in industry, government, military, www.payscale.com/college-salary-report/best-schools-by- continuing education, or international students type/bachelors/public-schools returning to their home countries. 3 Combined BS, MS, and PhD grads “IT IS ABSOLUTELY AMAZING TO BE ABLE TO PUT ON GLOVES AND TOUCH A VEHICLE THAT IS GOING INTO SPACE, LET ALONE CONTRIBUTE TO A TEAM OF INCREDIBLY SMART INDIVIDUALS TO HELP BUILD THIS VEHICLE AND GET IT INTO SPACE.” NADIA SMITH Mechanical Engineering REACHING BS, Class of 2021 FOR THE STARS GR ADUATED $ STUDENT 79K Average Starting OUTCOMES Salary 1 % A Record 22 Graduates Continue with 1,548 Advanced Education3 Total Graduates The Class of 2020 graduated into a labor market unlike any in recent history with a pandemic impacting course delivery and an unexpected, % sudden shift in the economy. Despite these Positive challenges, Mines graduates saw positive outcomes, Outcomes similar to prior years—a testament to their enduring 95 1,2 Rate value as professionals and graduates. 2 Employed in industry, government, military, continuing education, 1 BS, MS, and PhD grads or international students returning to their home countries. -

Macos Where Is My Total Commander Fman Es Una Gran Alternativa a TC Enmac
MacOs – Where Is My Total Commander Fman Es Una Gran Alternativa A TC En Mac MacOs – Where Is My Total Commander Fman Es Una Gran Alternativa A TC En Mac 1 / 3 2 / 3 To update, please download the shareware/demo version from above, then follow ... Or try Commander One - Free File Manager for Mac OS X with PRO Pack of ... Aimed to be an alternative of Total Commander for Mac users. Or CRAX Commander, which makes it easier for true fans of TC to migrate from Windows to Mac.. Altap Salamander is the first Windows File Explorer replacement that makes a ... is my Total Commander? fman es una gran alternativa a TC en Mac #MacOs .... The most popular Mac alternative is Small Double Commander icon Double ... Other interesting Mac alternatives to Total Commander are Small fman icon fman (Freemium), Small ... Plus it is available for much more platforms (linux, macos, bsd, ..) than just ... It's like TC but more modern and cross-platform. Guest • Apr 2017 .... #MacOs - Where is my Total Commander? fman es una gran alternativa a TC en Mac.. Total Commander - home Homepage of Total Commander, a file manager ... Free Your Desired Mac OS Apps GetinMac is The Apple Mac OS X Software & Games Website. ... Google Drive self-hosted alternative. ... Miles de fotos en nuestro contenido gratis para que disfrutes de una gran ... TC Arms File Manager :: Home.. NET Unofficial Total Commander database of all Total Commander''s plugins, addons ... Embark on a grand and epic quest as the Luminary – the hero chosen by ... OpenSSL will attempt to find an alternative certificate chain if the first attempt to .. -

Product Change Notification
Product Change Notification Change Notification #: 117391 - 00 Change Title: Select Intel® Arria® 10 Devices, PCN 117391-00, Product Design, EDCRC and Partial Reconfiguration Update Date of Publication: January 15, 2020 Key Characteristics of the Change: Product Design Forecasted Key Milestones: Availability of error message in Intel Quartus Prime software version 18.1.1 Now and above, if EDCRC and/or PR usage is detected without implementing software fix. Refer to the following KDB link for more details on the error message. https://www.intel.com/content/altera-www/global/en_us/index/support/support- resources/knowledge-base/component/2019/is-there-a-problem-with-intel--fpga- when-flipflop-dsp-m20k-lutra.html Availability of optimized internal voltage VCCHG fix in affected Intel Arria® Refer to Table 1 below 10 devices Description of Change to the Customer: Intel Programmable Solutions Group is notifying customers of potential problems in selected Intel Arria® 10 devices when Error Detection Cyclic Redundancy Check (EDCRC) is On or Partial Reconfiguration (PR) is used. This is the same change described in ADV2003 issued on January 10, 2020. Reason for Change: Due to potential problems discovered in selected Intel Arria® 10 devices using the EDCRC/PR feature, the above update was needed to help customers mitigate it. There is no change to the Intel Arria® 10 device silicon and materials. Page 1 of 3 Confidential - Disclosed Pursuant to CNDA PCN #117391- 00 Customer Impact of Change and Recommended Action: Failure signature: Unexpected output from Flipflop/DSP/M20k/LUTRAM when EDCRC or PR is used. The problems will not occur if EDCRC or PR is turned-off. -

Product Change Notification
Product Change Notification Change Notification #: 116422 - 00 Change Title: For select Intel® SSD DC S4500 Series and Intel® SSD DC S4600 Series SKUs, PCN 116422-00, Product Discontinuance, End of Life Date of Publication: August 31, 2018 Key Characteristics of the Change: Product Discontinuance Forecasted Key Milestones: Last Product Discontinuance Order Date: December 31, 2018 Last Product Discontinuance Shipment Date: April 30, 2019 Description of Change to the Customer: Intel is announcing the End of Life timeline for the Intel® SSD DC S4500 Series and Intel® SSD DC S4600 Series SKUs listed in the products affected table list in the PCN announcement. The Intel® SSD DC S4500 Series and Intel® SSD DC S4600 Series products listed on the "Products Affected/Intel Ordering Codes" table below will be discontinued and unavailable for additional orders after the December 31, 2018. Effective April 30, 2019 Intel will stop shipping Intel® SSD DC S4500 Series and Intel® SSD DC S4600 Series hardware. Customer Impact of Change and Recommended Action: While Intel will make commercially reasonable efforts to support last time order quantities, it is recommended for customers to transition to the next generation of products - Intel® SSD D3-S4510 Series and D3-S4610 Series. Please contact your local Intel Field Sales representative if you have any further questions about this End of Life notice. Page 1 of 3 PCN #116422 - 00 Products Affected / Intel Ordering Codes: Product Name Product Code MM# Intel® SSD DC S4500 Series (240GB, 2.5in SATA 6Gb/s,