Principles of Timekeeping for the NEAR and STEREO Spacecraft
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

C:\Data\My Files\WP\PTTI\Proceedings TOC For
34th Annual Precise Time and Time Interval (PTTI) Meeting TIMEKEEPING AND TIME DISSEMINATION IN A DISTRIBUTED SPACE-BASED CLOCK ENSEMBLE S. Francis Zeta Associates Incorporated B. Ramsey and S. Stein Timing Solutions Corporation J. Leitner, M. Moreau, and R. Burns NASA Goddard Space Flight Center R. A. Nelson Satellite Engineering Research Corporation T. R. Bartholomew Northrop Grumman TASC A. Gifford National Institute of Standards and Technology Abstract This paper examines the timekeeping environments of several orbital and aircraft flight scenarios for application to the next generation architecture of positioning, navigation, timing, and communications. The model for timekeeping and time dissemination is illustrated by clocks onboard the International Space Station, a Molniya satellite, and a geostationary satellite. A mathematical simulator has been formulated to model aircraft flight test and satellite scenarios. In addition, a time transfer simulator integrated into the Formation Flying Testbed at the NASA Goddard Space Flight Center is being developed. Real-time hardware performance parameters, environmental factors, orbital perturbations, and the effects of special and general relativity are modeled in this simulator for the testing and evaluation of timekeeping and time dissemination algorithms. 1. INTRODUCTION Timekeeping and time dissemination among laboratories is routinely achieved at a level of a few nanoseconds at the present time and may be achievable with a precision of a few picoseconds within the next decade. The techniques for the comparison of clocks in laboratory environments have been well established. However, the extension of these techniques to mobile platforms and clocks in space will require more complex considerations. A central theme of this paper – and one that we think should receive the attention of the PTTI community – is the fact that normal, everyday platform dynamics can have a measurable effect on clocks that fly or ride on those platforms. -

Chapter 7. Relativistic Effects
Chapter 7. Relativistic Effects 7.1 Introduction This chapter details an investigation into relativistic effects that could cause clock errors and therefore position errors in clock coasting mode. The chapter begins with a description of relativistic corrections that are already taken into account for the GPS satellites. Though these corrections are known and implemented [ICD-GPS-200, 1991], no similar corrections are made for GPS receivers that are in motion. Deines derived a set of missing relativity terms for GPS receivers [Deines, 1992], and these are considered in great detail here. A MATLAB simulation was used to predict the relativity effects based on the derivation of Deines, and flight data were used to determine if these effects were present. 7.2 Relativistic Corrections for the GPS Satellite The first effect considered stems from a Lorentz transformation for inertial reference frames. This effect from special relativity is derived from the postulate that the speed of light is constant in all inertial reference frames [Lorentz et. al., 1923]. The correction accounts for time dilation, i.e. moving clocks beat slower than clocks at rest. A standard example is as follows [Ashby and Spilker, 1996]. Consider a train moving at velocity v along the x axis. A light pulse is emitted from one side of the train and reflects against a mirror hung on the opposite wall. The light pulse is then received and the round trip time recorded. If the train car has width w (see Fig. 7.1), then the round trip time according to an observer on the train is: 110 Mirror w Light Pulse Emit/Receive Light Pulse Experiment as Observed on Board the Train Mirror (at time of reflection) v w Emit Pulse Receive Pulse Light Pulse Experiment as Viewed by a Stationary Observer Figure 7.1 Illustration of Time Dilation Using Light Pulses 111 2w t ' (7.1) train c where c is the speed of light. -

User Manual for Amazfit GTR 2 (English Edition) Contents
User Manual for Amazfit GTR 2 (English Edition) Contents User Manual for Amazfit GTR 2 (English Edition) ......................................................................................1 Getting started................................................................................................................................................3 Appearance ....................................................................................................................................3 Power on and off............................................................................................................................3 Charging ........................................................................................................................................3 Wearing & Replacing Watch Strap ...............................................................................................4 Connecting & Pairing ....................................................................................................................4 Updating the system of your watch ...............................................................................................5 Control center ................................................................................................................................5 Time System..................................................................................................................................6 Units...............................................................................................................................................6 -

SOFA Time Scale and Calendar Tools
International Astronomical Union Standards Of Fundamental Astronomy SOFA Time Scale and Calendar Tools Software version 1 Document revision 1.0 Version for Fortran programming language http://www.iausofa.org 2010 August 27 SOFA BOARD MEMBERS John Bangert United States Naval Observatory Mark Calabretta Australia Telescope National Facility Anne-Marie Gontier Paris Observatory George Hobbs Australia Telescope National Facility Catherine Hohenkerk Her Majesty's Nautical Almanac Office Wen-Jing Jin Shanghai Observatory Zinovy Malkin Pulkovo Observatory, St Petersburg Dennis McCarthy United States Naval Observatory Jeffrey Percival University of Wisconsin Patrick Wallace Rutherford Appleton Laboratory ⃝c Copyright 2010 International Astronomical Union. All Rights Reserved. Reproduction, adaptation, or translation without prior written permission is prohibited, except as al- lowed under the copyright laws. CONTENTS iii Contents 1 Preliminaries 1 1.1 Introduction ....................................... 1 1.2 Quick start ....................................... 1 1.3 The SOFA time and date routines .......................... 1 1.4 Intended audience ................................... 2 1.5 A simple example: UTC to TT ............................ 2 1.6 Abbreviations ...................................... 3 2 Times and dates 4 2.1 Timekeeping basics ................................... 4 2.2 Formatting conventions ................................ 4 2.3 Julian date ....................................... 5 2.4 Besselian and Julian epochs ............................. -

Lecture 12: March 18 12.1 Overview 12.2 Clock Synchronization
CMPSCI 677 Operating Systems Spring 2019 Lecture 12: March 18 Lecturer: Prashant Shenoy Scribe: Jaskaran Singh, Abhiram Eswaran(2018) Announcements: Midterm Exam on Friday Mar 22, Lab 2 will be released today, it is due after the exam. 12.1 Overview The topic of the lecture is \Time ordering and clock synchronization". This lecture covered the following topics. Clock Synchronization : Motivation, Cristians algorithm, Berkeley algorithm, NTP, GPS Logical Clocks : Event Ordering 12.2 Clock Synchronization 12.2.1 The motivation of clock synchronization In centralized systems and applications, it is not necessary to synchronize clocks since all entities use the system clock of one machine for time-keeping and one can determine the order of events take place according to their local timestamps. However, in a distributed system, lack of clock synchronization may cause issues. It is because each machine has its own system clock, and one clock may run faster than the other. Thus, one cannot determine whether event A in one machine occurs before event B in another machine only according to their local timestamps. For example, you modify files and save them on machine A, and use another machine B to compile the files modified. If one wishes to compile files in order and B has a faster clock than A, you may not correctly compile the files because the time of compiling files on B may be later than the time of editing files on A and we have nothing but local timestamps on different machines to go by, thus leading to errors. 12.2.2 How physical clocks and time work 1) Use astronomical metrics (solar day) to tell time: Solar noon is the time that sun is directly overhead. -

Clock Synchronization Clock Synchronization Part 2, Chapter 5
Clock Synchronization Clock Synchronization Part 2, Chapter 5 Roger Wattenhofer ETH Zurich – Distributed Computing – www.disco.ethz.ch 5/1 5/2 Overview TexPoint fonts used in EMF. Motivation Read the TexPoint manual before you delete this box.: AAAA A • Logical Time (“happened-before”) • Motivation • Determine the order of events in a distributed system • Real World Clock Sources, Hardware and Applications • Synchronize resources • Clock Synchronization in Distributed Systems • Theory of Clock Synchronization • Physical Time • Protocol: PulseSync • Timestamp events (email, sensor data, file access times etc.) • Synchronize audio and video streams • Measure signal propagation delays (Localization) • Wireless (TDMA, duty cycling) • Digital control systems (ESP, airplane autopilot etc.) 5/3 5/4 Properties of Clock Synchronization Algorithms World Time (UTC) • External vs. internal synchronization • Atomic Clock – External sync: Nodes synchronize with an external clock source (UTC) – UTC: Coordinated Universal Time – Internal sync: Nodes synchronize to a common time – SI definition 1s := 9192631770 oscillation cycles of the caesium-133 atom – to a leader, to an averaged time, ... – Clocks excite these atoms to oscillate and count the cycles – Almost no drift (about 1s in 10 Million years) • One-shot vs. continuous synchronization – Getting smaller and more energy efficient! – Periodic synchronization required to compensate clock drift • Online vs. offline time information – Offline: Can reconstruct time of an event when needed • Global vs. -

The Matter of Time
Preprints (www.preprints.org) | NOT PEER-REVIEWED | Posted: 15 June 2021 doi:10.20944/preprints202106.0417.v1 Article The matter of time Arto Annila 1,* 1 Department of Physics, University of Helsinki; [email protected] * Correspondence: [email protected]; Tel.: (+358 44 204 7324) Abstract: About a century ago, in the spirit of ancient atomism, the quantum of light was renamed the photon to suggest its primacy as the fundamental element of everything. Since the photon carries energy in its period of time, a flux of photons inexorably embodies a flow of time. Time comprises periods as a trek comprises legs. The flows of quanta naturally select optimal paths, i.e., geodesics, to level out energy differences in the least time. While the flow equation can be written, it cannot be solved because the flows affect their driving forces, affecting the flows, and so on. As the forces, i.e., causes, and changes in motions, i.e., consequences, cannot be separated, the future remains unpre- dictable, however not all arbitrary but bounded by free energy. Eventually, when the system has attained a stationary state, where forces tally, there are no causes and no consequences. Then time does not advance as the quanta only orbit on and on. Keywords: arrow of time; causality; change; force; free energy; natural selection; nondeterminism; quantum; period; photon 1. Introduction We experience time passing, but the experience itself lacks a theoretical formulation. Thus, time is a big problem for physicists [1-3]. Although every process involves a passage of time, the laws of physics for particles, as we know them today, do not make a difference whether time flows from the past to the future or from the future to the past. -

Changing the Time on Your Qqest Time Clock For
IntelliClockDaylight SavingSeries Time CHANGING THE TIME ON YOUR QQEST IQTIME 1000 CLOCK FOR DAYLIGHT SAVING TIME HardwareIt’s Daylight Specifications Saving Time Automatic DST Uploads main ClockLink screen. Highlight the clock that you would like to upload again! Make sure that your the date and time to and click on the clocks are reset before the The ClockLink Scheduler contains a “Connect” link. The ClockLink utility time changes. pre-configured Daylight Saving script connects to the selected time clock. As our flagship data collection terminal, Dimensionsintended & Weight: to automatically upload the 8.75” x 8.25” x 1.5”, approx. 1.65 lbs.; with the IQ1000, our most advanced time time to your clocks each Daylight . Once you have connected to a time biometric authentication module 1.9 lbs HID Proximity3 Card Reader: clock, delivers the capabilities required Saving. This script already exists in clock, the clock options are displayed the ClockLink Scheduler, and cannot HID 26 bit and 37 bit formats supported for even the most demanding Keypad: 25 keys (1-9, (decimal point), CLEAR, on the right-hand side of the screen. be edited or deleted. Since Windows The row of icons at the top of the applications. ENTER,automatically MENU, Lunch updates and Meal/Br the eakcomputer’s Keys, Communication Options: Job Costing and Tracking Keys, Department Directscreen Ethernet allows or Cellular you to select which time for Daylight Saving, the time offset functions you would like to perform at Transfernever Keys, needs Tip/Gratuity to be updated.Keys. Key “Click”. Selectable by user. If enabled, the clock will Cellular:the GSM clock. -

Clock/Calendar Implementation on the Stm32f10xxx Microcontroller RTC
AN2821 Application note Clock/calendar implementation on the STM32F10xxx microcontroller RTC The internal RTC (real-time clock) of the 32-bit, ARM® Cortex™-M3-based medium-density STM32F10xxx microcontroller is an independent timer. It provides a set of continuously running counters, which, using suitable software, can be used to implement a clock/calendar function. The RTC and backup registers are supplied through a switch that draws power from either the VDD supply (when present) or the backup battery. Thus the RTC runs even when the main supply is switched off. This application note gives an example of how to implement the clock/calendar functionality using the medium-density STM32F10xxx microcontroller in low-power and standard applications. The firmware example also performs leap year counting and tamper time stamping. It provides a low-power mode demonstration and a basic RTC calibration routine to compensate for crystal and temperature variations. The STM3210B-EVAL board supports the firmware example described in this application note without any modification to its hardware. Figure 1. STM3210B-EVAL board April 2009 Doc ID 14949 Rev 2 1/28 www.st.com Contents AN2821 Contents 1 Overview of the medium-density STM32F10xxx backup domain . 6 1.1 Main backup domain features . 6 1.2 Main RTC features . 7 2 Configuring the RTC registers . 8 3 Clock/calendar functionality features . 9 3.1 Clock/calendar basics . 9 3.1.1 Implementing the clock function on the medium-density STM32F10xxx . 9 3.1.2 Implementing calendar function on the medium-density STM32F10xxx . 9 3.1.3 Summer time correction . 11 3.2 Clock source selection . -
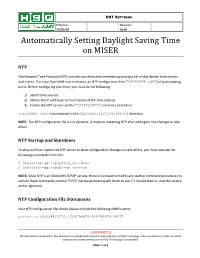
Automatically Setting Daylight Saving Time on MISER
DST SETTINGS Effective: Revision: 12/01/10 Draft Automa tically Setting Daylight Saving Time on MISER NTP The Network Time Protocol (NTP) provides synchronized timekeeping among a set of distributed time servers and clients. The local OpenVMS host maintains an NTP configuration file ( TCPIP$NTP.CONF) of participating peers. Before configuring your host, you must do the following: 1) Select time sources. 2) Obtain the IP addresses or host names of the time sources. 3) Enable the NTP service via the TCPIP$CONFIG command procedure. TCPIP$NTP.CONF is maintained in the SYS$SPECIFIC[TCPIP$NTP] directory. NOTE: The NTP configuration file is not dynamic; it requires restarting NTP after editing for the changes to take effect. NTP Startup and Shutdown To stop and then restart the NTP server to allow configuration changes to take effect, you must execute the following commands from DCL: $ @sys$startup:tcpip$ntp_shutdown $ @sys$startup:tcpip$ntp_startup NOTE: Since NTP is an OpenVMS TCP/IP service, there is no need to modify any startup command procedures to include these commands; normal TCP/IP startup processing will check to see if it should start or stop the service at the right time. NTP Configuration File Statements Your NTP configuration file should always include the following driftfile entry. driftfile SYS$SPECIFIC:[TCPIP$NTP]TCPIP$NTP.DRIFT CONFIDENTIAL All information contained in this document is confidential and is the sole property of HSQ Technology. Any reproduction in part or whole without the written permission of HSQ Technology is prohibited. PAGE: 1 of 9 DST SETTINGS ] NOTE: The driftfile is the name of the file that stores the clock drift (also known as frequency error) of the system clock. -
Time & Timers, and GPS Introduction
FYS3240 PC-based instrumentation and microcontrollers Time & timers, and GPS introduction Spring 2014 – Lecture #11 Bekkeng, 20.12.2013 TAI and UTC time • International Atomic Time (TAI) as a time scale is a weighted average of the time kept by over 300 atomic clocks in over 60 national laboratories worldwide. • Coordinated Universal Time (UTC) is the primary time standard by which the world regulates clocks and time, and is based on TAI but with leap seconds added at irregular intervals to compensate for the slowing of the Earth's rotation. • Since 30 June 2012 when the last leap second was added TAI has been exactly 35 seconds ahead of UTC. The 35 seconds results from the initial difference of 10 seconds at the start of 1972, plus 25 leap seconds in UTC since 1972. • UTC is the time standard used for many internet and World Wide Web standards. The Network Time Protocol (NTP), designed to synchronize the clocks of computers over the Internet, encodes times using the UTC system. Synchronize PC clock to NTP server in Windows Note: this Internet time settings is not available when the computer is part of a domain (such as the domain UIO.no) Windows Time service Leap seconds • Time is now measured using stable atomic clocks • A leap second is a one-second adjustment that is occasionally applied to UTC time in order to keep its time of day close to the mean solar time. o Solar time is a reckoning of the passage of time based on the Sun's position in the sky. -

Outbound Contact Deployment Guide
Outbound Contact Deployment Guide Time Zones 9/30/2021 Time Zones Time Zones Contents • 1 Time Zones • 1.1 Creating a Custom Time Zone for a Tenant • 1.2 Time Zones Object--Configuration Tab Fields • 1.3 Time Zones and Time-Related Calculations Outbound Contact Deployment Guide 2 Time Zones Outbound Contact uses time zones in call records to determine the contact's time zone. Genesys Administrator populates the tz_dbid field with the international three-letter abbreviation for the time zone parameter when it imports or exports a calling list. Call time, dial schedule time, and valid dial time (dial from and dial till) are based on the record's time-zone. For more information about the time zone abbreviations see Framework Genesys Administrator Help. If Daylight Savings Time (DST) is configured for time zones located below the equator using the Current Year or Fixed Date (Local) properties, define Note: both the Start Date and End Date in the DST definition as the current year and make the Start Date later than the End Date. Outbound Contact dynamically updates time changes from winter to summer and summer to winter. The default set of Time Zones created during Configuration Server installation is located in the Time Zones folder under the Environment (for a multi-tenant environment) or under the Resources folder (for a single tenant). Creating a Custom Time Zone for a Tenant • To create a custom Time Zone for a Tenant, if necessary. Start 1. In Genesys Administrator, select Provisioning > Environment > Time Zones. 2. Click New. 3. Define the fields in the Configuration tab.