Paper Session I-A - Is It SEP Yet?
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
The Minor Planet Bulletin
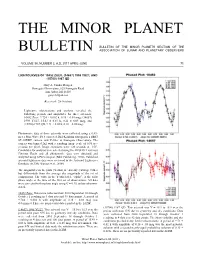
THE MINOR PLANET BULLETIN OF THE MINOR PLANETS SECTION OF THE BULLETIN ASSOCIATION OF LUNAR AND PLANETARY OBSERVERS VOLUME 38, NUMBER 2, A.D. 2011 APRIL-JUNE 71. LIGHTCURVES OF 10452 ZUEV, (14657) 1998 YU27, AND (15700) 1987 QD Gary A. Vander Haagen Stonegate Observatory, 825 Stonegate Road Ann Arbor, MI 48103 [email protected] (Received: 28 October) Lightcurve observations and analysis revealed the following periods and amplitudes for three asteroids: 10452 Zuev, 9.724 ± 0.002 h, 0.38 ± 0.03 mag; (14657) 1998 YU27, 15.43 ± 0.03 h, 0.21 ± 0.05 mag; and (15700) 1987 QD, 9.71 ± 0.02 h, 0.16 ± 0.05 mag. Photometric data of three asteroids were collected using a 0.43- meter PlaneWave f/6.8 corrected Dall-Kirkham astrograph, a SBIG ST-10XME camera, and V-filter at Stonegate Observatory. The camera was binned 2x2 with a resulting image scale of 0.95 arc- seconds per pixel. Image exposures were 120 seconds at –15C. Candidates for analysis were selected using the MPO2011 Asteroid Viewing Guide and all photometric data were obtained and analyzed using MPO Canopus (Bdw Publishing, 2010). Published asteroid lightcurve data were reviewed in the Asteroid Lightcurve Database (LCDB; Warner et al., 2009). The magnitudes in the plots (Y-axis) are not sky (catalog) values but differentials from the average sky magnitude of the set of comparisons. The value in the Y-axis label, “alpha”, is the solar phase angle at the time of the first set of observations. All data were corrected to this phase angle using G = 0.15, unless otherwise stated. -
Richard Nugent [email protected]
Volume 8, Number 3 November 2001 $5.00 North Am./$6.25 Other 2001 Lunar Leonid Impact International Occultation Timing Association, Inc. (IOTA) In this Issue Articles Page Statistical Comparison of Video and Visual Occultation Timings . 4 An Unusual Total Occultation or was it a Grazing Occultation?. 6 Minutes of the 2000 IOTA Annual Meeting . 7 In Memoriam: Robert Clyde . 14 Publication status of the Occultation Newsletter . .14 KIWI-Universal Time at a Pushbutton . 15 Watec 902H Camera . 16 2001 Leonid Lunar Impact Flash Confirmed. 16 Resources Page What to Send to Whom . 3 Membership and Subscription Information . 3 IOTA Publications. 3 The Offices and Officers of IOTA . 17 IOTA European Service (IOTA/ES) . 17 IOTA on the World Wide Web. Back Cover IOTA’s Telephone Network . Back Cover ON THE COVER: Lunar impact flash recorded by David Palmer at 19 November 2001 00:18:58 UT. The image was captured in evening twilight using a C-5 and a PC-23C camera at Los Alamos, New Mexico. David Dunham in Laurel, Maryland and Tony Cook in Alexandria, Virginia were able to confirm this impact. They both imaged the event with 8- inch telescopes using Watec 902H cameras while the Moon was near an altitude of only three degrees. 2 Occultation Newsletter, Volume 8, Number 3; November 2001 International Occultation Timing Association, Inc. (IOTA) What to Send to Whom Membership and Subscription Information All payments made to IOTA must be in United States Send new and renewal memberships and subscriptions, back funds and drawn on a US bank, or by credit card charge to issue requests, address changes, email address changes, graze VISA or MasterCard. -

The V-Band Photometry of Asteroids from ASAS-SN
Astronomy & Astrophysics manuscript no. 40759˙ArXiV © ESO 2021 July 22, 2021 V-band photometry of asteroids from ASAS-SN Finding asteroids with slow spin ? J. Hanusˇ1, O. Pejcha2, B. J. Shappee3, C. S. Kochanek4;5, K. Z. Stanek4;5, and T. W.-S. Holoien6;?? 1 Institute of Astronomy, Faculty of Mathematics and Physics, Charles University, V Holesoviˇ ckˇ ach´ 2, 18000 Prague, Czech Republic 2 Institute of Theoretical Physics, Faculty of Mathematics and Physics, Charles University, V Holesoviˇ ckˇ ach´ 2, 18000 Prague, Czech Republic 3 Institute for Astronomy, University of Hawai’i, 2680 Woodlawn Drive, Honolulu, HI 96822, USA 4 Department of Astronomy, The Ohio State University, 140 West 18th Avenue, Columbus, OH 43210, USA 5 Center for Cosmology and Astroparticle Physics, The Ohio State University, 191 W. Woodruff Avenue, Columbus, OH 43210, USA 6 The Observatories of the Carnegie Institution for Science, 813 Santa Barbara St., Pasadena, CA 91101, USA Received x-x-2021 / Accepted x-x-2021 ABSTRACT We present V-band photometry of the 20,000 brightest asteroids using data from the All-Sky Automated Survey for Supernovae (ASAS-SN) between 2012 and 2018. We were able to apply the convex inversion method to more than 5,000 asteroids with more than 60 good measurements in order to derive their sidereal rotation periods, spin axis orientations, and shape models. We derive unique spin state and shape solutions for 760 asteroids, including 163 new determinations. This corresponds to a success rate of about 15%, which is significantly higher than the success rate previously achieved using photometry from surveys. -

The Minor Planet Bulletin (Warner Et Al
THE MINOR PLANET BULLETIN OF THE MINOR PLANETS SECTION OF THE BULLETIN ASSOCIATION OF LUNAR AND PLANETARY OBSERVERS VOLUME 35, NUMBER 4, A.D. 2008 OCTOBER-DECEMBER 143. THE LIGHTCURVE OF ASTEROID 5331 ERIMOMISAKI 05 and Jan 09, respectively. The Vincent data were taken under poor conditions, which is reflected by the large error bars. Caleb Boe, Russell I. Durkee However, the data support the proposed period and were crucial in Shed of Science Observatory completing the curve. Analysis was performed using MPO 5213 Washburn Ave S. Minneapolis, MN 55410, USA Canopus. Silvano Casulli Acknowledgments Vallemare Di Borbona Observatory, Vallemare di Borbona, ITALY Thanks to Raoul Behrend for posting Casulli’s results on his website and for coordinating the exchange of data. Dr. Fiona Vincent School of Physics & Astronomy Special thanks to the Tzec Maun Foundation and its founder, University of St. Andrews Michael K. Wilson, for providing free access to telescopes for North Haugh, St. Andrews KY16 9SS, Scotland, UK students and researchers. David Higgins References Hunters Hill Observatory Ngunnawal, Canberra 2913 Behrend, R. (2007). Observatoire de Geneve web site, AUSTRALIA http://obswww.unige.ch/~behrend/page1cou.html (Received: 2008 June 1) Warner, B.D., Harris A.W. , Pravec, P. Kaasalainen, M., and Benner, L.A.M. (2007). Lightcurve Photometry Opportunities October-December 2007 Asteroid 5331 Erimomisaki was observed between 2007 http://minorplanetobserver.com/astlc/default.htm Nov. 30 and 2008 Jan. 9. A synodic period of 24.26 ± 0.02 h with a mean amplitude of 0.27 ± 0.02 mag was derived. Observations of 5331 Erimomisaki were carried out over ten nights between 2007 November and 2008 January. -

The Minor Planet Bulletin 40 (2013) 207
THE MINOR PLANET BULLETIN OF THE MINOR PLANETS SECTION OF THE BULLETIN ASSOCIATION OF LUNAR AND PLANETARY OBSERVERS VOLUME 40, NUMBER 4, A.D. 2013 OCTOBER-DECEMBER 187. LIGHTCURVE ANALYSIS OF EXTREMELY CLOSE Canopus package (Bdw Publishing). NEAR-EARTH ASTEROID – 2012 DA14 Asteroid 2012 DA14 is a near-Earth object (Aten category, q = Leonid Elenin 0.8289, a = 0.9103, e = 0.0894, i = 11.6081). Before the current Keldysh Institute of Applied Mathematics RAS close approach, 2012 DA14 had orbital elements within the Apollo ISON-NM Observatory (MPC H15), ISON category (q = 0.8894, a = 1.0018, e = 0.1081, i = 10.3372). 140007, Lyubertsy, Moscow region, 8th March str., 47-17 Parameters of the orbit make this asteroid an interesting target for a [email protected] possible space mission. Asteroid 202 DA14 was discovered on Feb 23 2012 by the La Sagra Sky Survey, LSSS (MPC code J75). Igor Molotov Keldysh Institute of Applied Mathematics RAS An extremely close approach to the Earth (0.00022 AU or ~34 000 ISON km) occurred 2013 Feb 15.80903. We observed this asteroid after its close approach, 2013 Feb 16, from 02:11:35 UT to 12:17:43 UT (Received: 20 February*) (Table1). Our total observational interval was 10 h 16 min, i.e. ~108% of the rotation period. In this paper we present one of the first lightcurves of near-Earth asteroid 2012 DA14. This is a very interesting near-Earth asteroid, which approached the Earth at a very close distance on Feb. 15 2013. From our UT Δ r phase mag measurements we find a rotational period of 9.485 ± 02:11:35 0.0011 0.988 73.5 11.8 0.144 h with an amplitude of 1.79 mag. -

Assa Handbook-1998
ASTRONOMICAL HANDBOOK FOR SOUTHERN AFRICA 1 9 9 8 G Ot \ i 9 77 057 719007 PLANETARIUM f ^ S A MUSEUM 25 Queen Victoria Street, 61 Cape Town 8000, @ (021) 24 3330 o Public shows o Shows especially for young children o Monthly sky updates o Astronomy courses o School shows o Music concerts o Club bookings o Corporate launch venue For more information telephone 24 3330 ASTRONOMICAL HANDBOOK FOR SOUTHERN AFRICA 1998 The 52nd year of publication This booklet is intended both as an introduction to observational astronomy for the interested layman - even if his interest is only a passing one - and as a handbook for the established amateur or professional astronomer. Front cover The 5” Hirst Moonwatch Telescope of the Cederberg Observatory at the Cape Centre 'sidewalk astronomy' outing held at the Victoria and Albert Waterfront in November 1995. Photograph: C R G Turk ® t h e Astronomical Society of Southern Africa, Cape Town. 1997 ISSN 0571-7191 CONTENTS ASTRONOMY IN SOUTHERN AFRICA......................................... .1 DIARY................................................................. 6 THE SUN............................................................... 8 THE MOON............................................................. 11 THE PLANETS......................... 20 THE MOONS OF JUPITER ............................................28 THE MOONS OF SATURN.............................................. 32 COMETS AND METEORS...................................................33 THE STARS........................................................... -

The Minor Planet Bulletin 32-2, 34-35 Florida Gulf Coast University (FGCU) in Fort Myers, Florida
THE MINOR PLANET BULLETIN OF THE MINOR PLANETS SECTION OF THE BULLETIN ASSOCIATION OF LUNAR AND PLANETARY OBSERVERS VOLUME 32, NUMBER 4, A.D. 2005 OCTOBER-DECEMBER 73. CCD PHOTOMETRY OF ASTEROIDS 651 ANTIKLEIA, The targets were selected from a list of asteroid photometry 738 ALAGASTA, AND 2151 HADWIGER USING A opportunities published by Brian Warner on his Collaborative REMOTE COMMERCIAL TELESCOPE Asteroid Lightcurve Link (CALL) website (Warner, 2004). Selection criteria included: proximity of the asteroids to each other Pedro V. Sada and to a nearby suitable star calibration field to save on telescope Eder D. Canizales slewing time, asteroid declination and closeness of opposition date Edgar M. Armada to dates of observation for maximum nightly coverage, appropriate Departamento de Física y Matemáticas asteroid magnitude to acquire enough counts for a S/N of at least Universidad de Monterrey 100 with 1-minute V-filtered exposures, and a high reported Av. I. Morones Prieto 4500 Pte. asteroid absolute magnitude (H-value) to target the smallest Garza García, N. L., 66238 asteroid size possible. MÉXICO Usable data were collected on 2004 March 16-17, 28-30 and April (Received: June 6 Revised: June 13) 14 & 16 for 651 Antikleia; and May 7 & 11-13 for 738 Alagasta and 2151 Hadwiger. All dates are UT. In total, 174 images were obtained and processed for Antikleia, 113 for Alagasta and 105 for CCD photometry of asteroids 651 Antikleia, Hadwiger, using a standard Johnson V photometric filter and 1- 738 Alagasta, and 2151 Hadwiger obtained remotely at minute exposure times. Of these, 159 (91%) were used in the final Tenagra Observatories during March, April and May analysis for Antikleia, 111 (98%) for Alagasta and 105 (100%) for 2004 is reported.