Challenges in Characterization of GNSS Precise Positioning Systems for Automotive
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Labsat Flyer
GNSS Simulator RECORDS Real world GNSS signals REPLAYS GPS, Galileo, GLONASS, BeiDou, SBAS & QZSS RF data SIMULATES User defined scenarios anywhere The most affordable, portable, and versatile multi-constellation Global Navigation Satellite Simulator on the market. If you are selling, testing or developing products How does it work? incorporating satellite navigation chipsets, then you’ll receives the signal from a standard satellite find makes your job easier, quicker and antenna, but instead of processing each of the received more cost effective. signals to calculate a position fix, digitises and stores the original satellite signals at a very high Why use a Simulator? bandwidth onto a removable SD card or USB disk. records and replays real world data, allowing realistic and repeatable testing to be carried out under The RF output of the is then connected to controlled conditions. Signal artefacts including the antenna input of the device under test and the multipath, ionospheric effects and signal dropouts are recorded data is replayed back as an RF signal. The reproduced and there are no limits to the number of device under test will then start to track the satellites as satellites used in the test. though it was travelling along the same path taken by the during the original recording. Conventional testing usually requires driving the same route multiple times, where conditions vary and satellite How easy is it to use? constellations change between tests. This can make it One touch record/replay makes extremely very challenging to reproduce and fault find software simple to operate. With its rugged construction, built in errors or reception issues with the device under test. -

Dynamic Performance Evaluation of Various GNSS Receivers and Positioning Modes with Only One Flight Test
electronics Technical Note Dynamic Performance Evaluation of Various GNSS Receivers and Positioning Modes with Only One Flight Test Cheolsoon Lim 1, Hyojung Yoon 1, Am Cho 2, Chang-Sun Yoo 2 and Byungwoon Park 1,* 1 School of Aerospace Engineering, Sejong University, 209 Neungdong-ro, Gwangjin-gu, Seoul 05006, Korea; [email protected] (C.L.); [email protected] (H.Y.) 2 Future Aircraft Research Division, Korea Aerospace Research Institute, Daejeon 34133, Korea; [email protected] (A.C.); [email protected] (C.-S.Y.) * Correspondence: [email protected]; Tel.: +82-02-3408-4385 Received: 20 November 2019; Accepted: 7 December 2019; Published: 11 December 2019 Abstract: The performance of global navigation satellite system (GNSS) receivers in dynamic modes is mostly assessed using results obtained from independent maneuvering of vehicles along similar trajectories at different times due to limitations of receivers, payload, space, and power of moving vehicles. However, such assessments do not ensure valid evaluation because the same GNSS signal environment cannot be ensured in a different test session irrespective of how accurately it mimics the original session. In this study, we propose a valid methodology that can evaluate the dynamic performance of multiple GNSS receivers in various positioning modes with only one dynamic test. We used the record-and-replay function of RACELOGIC’s LabSat3 Wideband and developed a software that can log and re-broadcast Radio Technical Commission for Maritime Services (RTCM) messages for the augmented systems. A preliminary static test and a drone test were performed to verify proper operation of the system. -

Labsat Turntable System by RACELOGIC Is an Effective and Affordable GNSS Navigation Dead Reckoning (DR) Simulator
LabSat Turntable System by RACELOGIC is an effective and affordable GNSS Navigation Dead Reckoning (DR) Simulator Turntable System If you are selling, testing or developing dead reckoning (DR) products incorporating GPS, GLONASS or BeiDou receivers, the LabSat Turntable System makes your job easier, faster, and more effective. Why use a turntable? To cover for the losses in satellite visibility that occur in urban canyons, tunnels, and under bridges, most OEM navigation systems have a dead RECORD real world GNSS signals, vehicle dynamics and live video reckoning (DR) capability that utilises REPLAY GNSS signals synchronised with vehicle dynamics and video vehicle wheel speed data and turn rate information. If the dead reckoning SIMULATE live vehicle data into a navigation system signals are not present during bench testing, the navigation systems can Record: not function correctly. This problem is • LabSat records live-sky satellite signals from GPS, GLONASS and BeiDou overcome when using our full navigation • Wheel speed signals are taken from vehicle CAN or digital speed pulse testing solution comprising of a • Video VBOX records video as well as rate of turn from a VBOX IMU LabSat GNSS simulator, Video VBOX Replay: data logger, turntable, and yaw rate • LabSat streams satellite navigation signals into the device under test sensor. • Live-sky replay is totally realistic, incorporating multipath and obscuration How does it work? • Satellite-Based Augmentation Signals (SBAS) such as WAAS, EGNOS, and QZSS, are also reproduced The turntable system uses GPS, Results: GLONASS, and BeiDou satellite • The turntable revolves in simulation of original vehicle turns, activating the DR under signals recorded simultaneously with test vehicle yaw rate and wheel speed. -
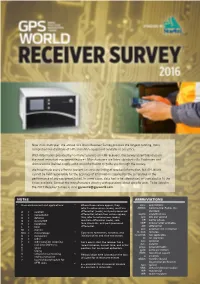
Click Here to Download the 2016 GPS World Receiver Survey
Now in its 24th year, the annual GPS World Receiver Survey provides the longest running, most comprehensive database of GPS and GNSS equipment available in one place. With information provided by 45 manufacturers on 438 receivers, the survey assembles data on the most important equipment features. Manufacturers are listed alphabetically. Footnotes and abbreviations (below) supply additional information to guide you through the survey. We have made every effort to present an accurate listing of receiver information, but GPS World cannot be held responsible for the accuracy of information supplied by the companies or the performance of any equipment listed. In some cases, data had to be abbreviated or truncated to fit the space available. Contact the manufacturers directly with questions about specific units. To be listed in the 2017 Receiver Survey, e-mail [email protected]. NOTES ABBREVIATIONS 1 User environment and applications: 2 Where three values appear, they apps: applications refer to autonomous (code), real-time ARINC: Aeronautical Radio, Inc. A = aviation differential (code), and post-processed standard C = recreational differential; where four values appear, async: asynchronous D = defense they refer to autonomous (code), bps: bits per second G = survey/GIS real-time differential (code), real- CP: carrier phase H = handheld time kinematic, and post-processed CEP: circular error probable L = land differential. diff: differential M = marine ext.: external / int. = internal Met = meteorology 3 Cold start: ephemeris, almanac, and m, min: minutes N = navigation initial position and time not known. na or NA: not applicable O = other nr: no response opt.: optional P = other position reporting 4 For a warm start, the receiver has a par.: parallel R = real-time DGPS ref. -
GPS Measurement and Recording - GNSS Introduction to GNSS Systems
www.dewesoft.com - Copyright © 2000 - 2021 Dewesoft d.o.o., all rights reserved. GPS measurement and recording - GNSS Introduction to GNSS systems Image 1: Galileo GNSS satellite Global Navigation Satellite System (GNSS) is a space based system of satellites that provide location (longitude, latitude, altitude) and time information in all weather conditions, anywhere on or near the Earth where there is an unobstructed line of sight to four or more GNSS satellites. Currently two GNSS systems have global coverage: GPS (Global Positioning System) is made by US and consists of at least 24 operational satellites around the Earth. It is currently the world's most utilized satellite navigation system. GLONASS (Globalnaya Navigatsionnaya Sputnikovaya Sistema) is the Russian navigation system which consists of 31 satellites (24 operational). Additional two global navigation systems are currently in construction: BeiDou Navigation Satellite System is Chinese GNSS system, which currently consists of 22 operational satellites in orbit. The system can already be used for positioning in Asia-Pacific region. Global operational capability with 35 satellites is expected in 2020. Galileo is European GNSS. Currently there are 18 satellites in orbit. It is expected to be in full operational capability by the year 2020. GPS basics [Video available in the online version] 1 2 How positioning is achieved? True range multilateration or trilateration is the basic concept behind GNSS position calculation. GNSS Satellites are sending signals which contain a fast periodic synchronization code and a slow navigation message. The synchronization code is used to determine the time it took for the signal to reach the receiver. -

Comparison of Global Navigation Satellite System Devices on Speed Tracking in Road (Tran)SPORT Applications
Sensors 2014, 14, 23490-23508; doi:10.3390/s141223490 OPEN ACCESS sensors ISSN 1424-8220 www.mdpi.com/journal/sensors Article Comparison of Global Navigation Satellite System Devices on Speed Tracking in Road (Tran)SPORT Applications Matej Supej 1,2,* and Ivan Čuk 1 1 Department of Biomechanics, Faculty of Sport, University of Ljubljana, Ljubljana 1000, Slovenia; E-Mail: [email protected] 2 Faculty of Mathematics, Natural Sciences and Information Technologies, University of Primorska, Koper 6000, Slovenia * Author to whom correspondence should be addressed; E-Mail: [email protected]; Tel.: +386-1-520-7762; Fax: +386-1-520-7750. External Editor: Felipe Jimenez Received: 15 September 2014; in revised form: 24 November 2014 / Accepted: 28 November 2014 / Published: 8 December 2014 Abstract: Global Navigation Satellite Systems (GNSS) are, in addition to being most widely used vehicle navigation method, becoming popular in sport-related tests. There is a lack of knowledge regarding tracking speed using GNSS, therefore the aims of this study were to examine under dynamic conditions: (1) how accurate technologically different GNSS measure speed and (2) how large is latency in speed measurements in real time applications. Five GNSSs were tested. They were fixed to a car’s roof-rack: a smart phone, a wrist watch, a handheld device, a professional system for testing vehicles and a high-end Real Time Kinematics (RTK) GNSS. The speed data were recorded and analyzed during rapid acceleration and deceleration as well as at steady speed. The study produced four main findings. Higher frequency and high quality GNSS receivers track speed at least at comparable accuracy to a vehicle speedometer. -

Products Overview
Products Overview NavtechGPS Your ONE Source for GNSS Products and Solutions Woman-Owned Small Business 800-628-0885 +1-703-256-8900 www.NavtechGPS.com V042914 www.NavtechGPS.com Let our experts help you with your GPS/GNSS technology needs GNSS Equipment Sales Seminars We sell, integrate and support equipment from more Learn from industry leading GNSS professionals. than 30 manufacturers to offer complete systems Training held on-site at your location or at solutions or single components. public venues. Precy Aquino-Jessen Franck Boynton Carolyn McDonald Technical Sales & Vice President & CTO President and Seminar Government Accounts Director Executive Management Carolyn McDonald Franck Boynton Mary Miller CEO and President Vice President & CTO Chief Financial Officer This catalog features only a small selection of the many manufacturers we represent and products we carry. Please see our website for a complete list of products, services and manufactuers. Please also see our website and separate seminar catalog for a list of the many GNSS training courses we offer, both on-site and at choice locations. Contents Product and Services Overview ..................................................................................................................................................................................3 Distributors, Resellers, Integrators and Innovators ................................................................................................................................................5 Chronos Technology ..........................................................................................................................................................................................................................................................................5 -

September Issue 2020
•GIS • GPS September 2020 Volume 19 Issue5 • CAD • REMOTE SENSING • PHOTOGRAMMETRY • SURVEYING • CARTOGRAPHY • IMAGE PROCESSING • BUSINESS GEOGRAPHICS GeoConnexion International Magazine EMERGENCYDISPATCH HOWTOSENDUAVSTOMONITOR SITUATIONSAUTOMATICALLYANDSAFELY MAKING CONSTRUCTION BOMB-PROOF SCANNING AT THECLIFF-FACE The latest geoinformation serving the World Imaging Power Leica GS18 I Mapping just got simpler, safer and more efficient than ever before. Meet the Leica GS18 IGNSS rover with Visual Positioning. With it, you can effortlessly measure points you couldn’t reach before. Just capture the site and measure using images. GS18 Iisso innovative, you can measure points over a busy street even if cars are passing by. Once you capture the site, you can measure every detail whenever you want to. Measure what you see leica-geosystems.com/GS18I Leica Geosystems AG leica-geosystems.com ©2020 Hexagon AB and/or its subsidiaries and affiliates. Leica Geosystems is part of Hexagon. All rights reserved. DISTANCE LEARNING Editorial: Rob Buckley, Editor -GeoInternational [email protected] PeterFitzGibbon, Editor -GeoUK [email protected] COVID-19 IS MAKING US ALL SOCIALLY +44(0) 1992 788249 DISTANT. BUT WE’RE ALL HAVING TO Eric van Rees,NewsEditor LOOK AT NEW WAYS OF UNDERSTANDING +34-958281507 LOCATION AT A DISTANCE [email protected] ROBBUCKLEY Columnists: EDITOR GeoInternational [email protected] LouiseFriis-Hansen, FIG DanielKatzer, Hinte Messe Alistair Maclenan, Quarry OneEleven SimonChester, OGC GeoUK Mark Poveda, Modern Surveying TerriFreemantle, Observations Seppe Cassettari, GEO:Innovation Publisher: MaiWard +44(0) 1223 279151 [email protected] News reports of successful early trials of emergencysituations to monitor them. But Advertising: vaccines forCovid-19 arewelcome,but it’s without pilots,how can this be done safely? MickiKnight, Sales&MarketingDirector hardtotellwhen –orevenif–the worldwill On page 36, meanwhile,Vincenzo +44(0) 7801 907666 returntonormal following the pandemic. -

GPS/GNSS Equipment Overview
GPS/GNSS Equipment Overview Delivering expert system design and COTS equipment solutions for over two decades launch • RecoveRy • geopositioning • navigation YOUR ONE SOURCE FOR GNSS EQUIPMENT AND TRAINING 041516 v www.NavtechGPS.com • 800.628.0885 • +1.703.256.8900 • Woman-Owned Small Business Your ONE Source for GNSS NavtechGPS Products, Solutions and Training We sell products from ... Products and Services In-house expertise on a wide range of components and systems from more than 30 manufacturers. Customized systems using off-the-shelf components COTS( ) Indoor locating and positioning in gps-denied areas RF networking system design and installation (Das) Space weather monitor receivers for tracking through scintillation. Hand-held gnss jamming, interference detection and mitigation Differential subscription services GNSS heading and attitude GNSS record/replay OEM receiver boards PPP systems GPS/GNSS simulators RtK systems OEM on-chip gps-aided ins GNSS antennas GNSS development software Smart antennas Signal distribution products Customized cables GNSS inertial navigation GIS equipment GNSS signal interference mitigation SBAS Post-processing software GNSS Training and Seminars NavtechGPS is a world leader in GPS/GNSS education and training with nearly 30 years of experience. We conduct on-site courses for 10 or more people, saving you overhead, travel expenses and time. We can tailor any course from our comprehensive list of courses to meet your group’s needs. ® For individuals or smaller groups, our public venues offer an excel- lent learning environment, networking opportunities and time for in-depth instruction. References and Books We stock highly specialized GPS/GNSS titles. Most orders ship the same day. -

GNSS Simulator RECORDS Real World GNSS Signals REPLAYS GPS, Galileo, GLONASS, Beidou, SBAS & QZSS RF Data SIMULATES User Defined Scenarios Anywhere
GNSS Simulator RECORDS Real world GNSS signals REPLAYS GPS, Galileo, GLONASS, BeiDou, SBAS & QZSS RF data SIMULATES User defined scenarios anywhere The most affordable, portable, and versatile multi-constellation Global Navigation Satellite Simulator on the market. If you are selling, testing or developing products How does it work? incorporating satellite navigation chipsets, then you’ll LabSat 3 receives the signal from a standard satellite find LabSat 3 makes your job easier, quicker and more antenna, but instead of processing each of the received cost effective. signals to calculate a position fix, LabSat 3 digitises and stores the original satellite signals at a very high Why use a Simulator? bandwidth onto a removable SD card or USB disk. LabSat 3 records and replays real world data, allowing realistic and repeatable testing to be carried out under The RF output of the LabSat 3 is then connected to the controlled conditions. Signal artefacts including antenna input of the device under test and the recorded multipath, ionospheric effects and signal dropouts are data is replayed back as an RF signal. The device under reproduced and there are no limits to the number of test will then start to track the satellites as though it was satellites used in the test. travelling along the same path taken by the LabSat 3 during the original recording. Conventional testing usually requires driving the same route multiple times, where conditions vary and satellite How easy is it to use? constellations change between tests. This can make it One touch record/replay makes LabSat 3 extremely very challenging to reproduce and fault find software simple to operate. -

Differential Base Station (RLVBBS6)
Differential Base Station (RLVBBS6) The RACELOGIC DGNSS RTK Base Station is designed to improve positional accuracy of VBOX systems as well as other compatible GNSS systems by calculating and transmitting differential GNSS correction data. By setting up the Base Station in a known position, it is able to accurately monitor the difference between its known position and the position that it is calculating from GNSS satellite signals. The difference is then transmitted via radio to allow a remote GNSS system to correct its position. The differential correction message can be broadcasted in RTCM v2, RTCM v3, RTCM v3.2 MSM4 and MSM7, or proprietary RTK formats using an internal or mast mounted radio modem transmitter. Depending on the type of rover unit used, position accuracies of up to 2 cm* are available. Features • Survey grade GNSS multi-band receiver (GPS • Optional integral or mast mount radio transmitters L1/L2/L1C/L2C, GLONASS L1/L2, Galileo E1/E5a/E5b, with range of up to 10 km (approx. 6.2 miles) line BeiDou B1/B2. of sight and 2 km in built-up areas • Accuracy*: Horizontal up to 5mm + 0.5ppm x • Self-survey mode Baseline; Vertical up to 10mm + 0.8 x Baseline • Up to 18 hrs built-in battery life (depending on • RTCM v2, RTCM v3, RTCM v3.2 MSM4 and MSM7, or radios in use) or external power proprietary outputs • Rugged IP64 (splash proof) enclosure • 25-position memory to store and recall different • Compatible with a wide range of radios to suit reference locations location and range requirements * 95 % CEP (Circle Error Probable) means 95 % of the time the position readings will fall within a circle of the stated radius.