Adaptive Antenna Array Beamforming and Power Management
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Study of Radiation Patterns Using Modified Design of Yagi-Uda Antenna G
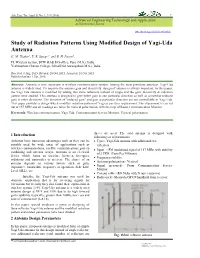
Adv. Eng. Tec. Appl. 5, No. 1, 7-9 (2016) 7 Advanced Engineering Technology and Application An International Journal http://dx.doi.org/10.18576/aeta/050102 Study of Radiation Patterns Using Modified Design of Yagi-Uda Antenna G. M. Thakur1, V. B. Sanap2,* and B. H. Pawar1. PI, Wireless section, DPW &Adl DG office, Pune (M.S.), India. Yeshwantrao Chavan College, Sillod Dist Aurangabad (M.S.), India. Received: 8 Aug. 2015, Revised: 20 Oct. 2015, Accepted: 28 Oct. 2015. Published online: 1 Jan. 2016. Abstract: Antenna is very important in wireless communication system. Among the most prevalent antennas, Yagi-Uda antenna is widely used. To improve the antenna gain and directivity, design of antenna is always important. In this paper, the Yagi Uda antenna is modified by adding two more reflectors instead of single and the gain, directivity & radiation pattern were studied. This antenna is designed to give better gain in one particular direction as well as somewhat reduced gain in other directions. The direction of "reduced gain" and gain at particular direction are not controllable in Yagi Uda. This paper provides a design which modifies radiation pattern of Yagi as per user requirement. The experiment is carried out at 157 MHz and all readings are taken for vertical polarization, with the help of Radio Communication Monitor. Keywords: Wireless communication, Yagi-Uda, Communication Service Monitor, Vertical polarization. 1 Introduction three) are used. The said antenna is designed with following set of parameters, Antennas have numerous advantages such as they can be Type:- Yagi-Uda antenna with additional two suitably used for wide range of applications such as reflectors wireless communications, satellite communications, pattern Input :- FM modulated signal of 157 MHz, with stability combining and antenna arrays. -

Array Designs for Long-Distance Wireless Power Transmission: State
INVITED PAPER Array Designs for Long-Distance Wireless Power Transmission: State-of-the-Art and Innovative Solutions A review of long-range WPT array techniques is provided with recent advances and future trends. Design techniques for transmitting antennas are developed for optimized array architectures, and synthesis issues of rectenna arrays are detailed with examples and discussions. By Andrea Massa, Member IEEE, Giacomo Oliveri, Member IEEE, Federico Viani, Member IEEE,andPaoloRocca,Member IEEE ABSTRACT | The concept of long-range wireless power trans- the state of the art for long-range wireless power transmis- mission (WPT) has been formulated shortly after the invention sion, highlighting the latest advances and innovative solutions of high power microwave amplifiers. The promise of WPT, as well as envisaging possible future trends of the research in energy transfer over large distances without the need to deploy this area. a wired electrical network, led to the development of landmark successful experiments, and provided the incentive for further KEYWORDS | Array antennas; solar power satellites; wireless research to increase the performances, efficiency, and robust- power transmission (WPT) ness of these technological solutions. In this framework, the key-role and challenges in designing transmitting and receiving antenna arrays able to guarantee high-efficiency power trans- I. INTRODUCTION fer and cost-effective deployment for the WPT system has been Long-range wireless power transmission (WPT) systems soon acknowledged. Nevertheless, owing to its intrinsic com- working in the radio-frequency (RF) range [1]–[5] are plexity, the design of WPT arrays is still an open research field currently gathering a considerable interest (Fig. -

Design and Simulation of Smart Antenna Array Using Adaptive Beam Forming Method R
ISSN: 2319-5967 ISO 9001:2008 Certified International Journal of Engineering Science and Innovative Technology (IJESIT) Volume 3, Issue 6, November 2014 Design and Simulation of Smart Antenna Array Using Adaptive Beam forming Method R. Evangilin Beulah, N.Aneera Vigneshwari M.E., Department of ECE, Francis Xavier Engineering College, Tamilnadu (India) Abstract— This paper presents design of a smart antenna system based on direction-of-arrival estimation and adaptive beam forming. In order to obtain the antenna pattern synthesis for a ULA (uniform linear array) we use Dolph Chebyshev method. For the estimation of Direction-of-arrival (DOA) MUSIC algorithm (Multiple User Signal Classification) is used in order to identify the directions of the source signals incident on the antenna array comprising the smart antenna system. LMS algorithm is used for adaptive beam forming in order to direct the main beam towards the desired source signals and to adaptively move the nulls towards the unwanted interference in the radiation pattern. Thereby increasing the channel capacity to accommodate a higher number of users. The implementation of LMS algorithm helps in improving the following parameters in terms of signal to noise ration, convergence rate, increased channel capacity, average bit error rate. In this paper, we will discuss and analyze about the DolphChebyshev method for antenna pattern synthesis, MUSIC algorithm for DOA (Direction of Arrival) estimation and least mean squares algorithm for Beam forming. Index Terms—Uniform Linear Array (ULA), Direction of Arrival (DOA), Multiple User Signal Classification (MUSIC), Least Mean Square (LMS). I. INTRODUCTION A smart antenna has the ability to diminish noise, increase signal to noise ratio and enhance system competence [1]. -

High Gain Isotropic Rectenna Erika Vandelle, Phi Long Doan, Do Hanh Ngan Bui, T.-P
High gain isotropic rectenna Erika Vandelle, Phi Long Doan, Do Hanh Ngan Bui, T.-P. Vuong, Gustavo Ardila, Ke Wu, Simon Hemour To cite this version: Erika Vandelle, Phi Long Doan, Do Hanh Ngan Bui, T.-P. Vuong, Gustavo Ardila, et al.. High gain isotropic rectenna. 2017 IEEE Wireless Power Transfer Conference (WPTC), May 2017, Taipei, Taiwan. pp.54-57, 10.1109/WPT.2017.7953880. hal-01722690 HAL Id: hal-01722690 https://hal.archives-ouvertes.fr/hal-01722690 Submitted on 29 Aug 2018 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. High Gain Isotropic Rectenna E. Vandelle1, P. L. Doan1, D.H.N. Bui1, T.P. Vuong1, G. Ardila1, K. Wu2, S. Hemour3 1 Université Grenoble Alpes, CNRS, Grenoble INP*, IMEP–LAHC, Grenoble, France 2 Polytechnique Montréal, Poly-Grames, Montreal, Quebec, Canada 3 Université de Bordeaux, IMS Bordeaux, Bordeaux Aquitaine INP, Bordeaux, France *Institute of Engineering University of Grenoble Alpes {vandeler, buido, vuongt, ardilarg}@minatec.inpg.fr [email protected] [email protected] [email protected] Abstract— This paper introduces an original strategy to step up the capacity of ambient RF energy harvesters. -

25. Antennas II
25. Antennas II Radiation patterns Beyond the Hertzian dipole - superposition Directivity and antenna gain More complicated antennas Impedance matching Reminder: Hertzian dipole The Hertzian dipole is a linear d << antenna which is much shorter than the free-space wavelength: V(t) Far field: jk0 r j t 00Id e ˆ Er,, t j sin 4 r Radiation resistance: 2 d 2 RZ rad 3 0 2 where Z 000 377 is the impedance of free space. R Radiation efficiency: rad (typically is small because d << ) RRrad Ohmic Radiation patterns Antennas do not radiate power equally in all directions. For a linear dipole, no power is radiated along the antenna’s axis ( = 0). 222 2 I 00Idsin 0 ˆ 330 30 Sr, 22 32 cr 0 300 60 We’ve seen this picture before… 270 90 Such polar plots of far-field power vs. angle 240 120 210 150 are known as ‘radiation patterns’. 180 Note that this picture is only a 2D slice of a 3D pattern. E-plane pattern: the 2D slice displaying the plane which contains the electric field vectors. H-plane pattern: the 2D slice displaying the plane which contains the magnetic field vectors. Radiation patterns – Hertzian dipole z y E-plane radiation pattern y x 3D cutaway view H-plane radiation pattern Beyond the Hertzian dipole: longer antennas All of the results we’ve derived so far apply only in the situation where the antenna is short, i.e., d << . That assumption allowed us to say that the current in the antenna was independent of position along the antenna, depending only on time: I(t) = I0 cos(t) no z dependence! For longer antennas, this is no longer true. -

WDP.2458.25.4.B.02 Linear Polarization Wifi Dual Bands Patch
SPECIFICATION PATENT PENDING Part No. : WDP.2458.25.4.B.02 Product Name : Wi-Fi Dual-band 2.4/5 GHz Embedded Ceramic Patch Antenna 6dBi+ at 2.4GHz 6dBi+ on 5 to 6 GHz Features : 25mm*25mm*4mm 2400MHz to 2500MHz/5150MHz to 5850MHz Pin Type Supports IEEE 802.11 Dual-band Wi-Fi systems Dual linear polarization Tuned for 70x70mm ground plane RoHS & REACH Compliant SPE-14-8-039/B/WY Page 1 of 14 1. Introduction This unique patent pending high gain, high efficiency embedded ceramic patch antenna is designed for professional Wi-Fi dual-band IEEE 802.11 applications. It is mounted via pin and double-sided adhesive. The passive patch offers stable high gain response from 4 dBi to 6dBi on the 2.4GHz band and from 5dBi to 8dBi on the 5 ~6 GHz band. Efficiency values are impressive also across the bands with on average 60%+. The WDP.25’s high gain, high efficiency performance is the perfect solution for directional dual-band WiFi application which need long range but which want to use small compact embedded antennas. The much higher gain and efficiency of the WDP.25 over smaller less efficient more omni-directional chip antennas (these typically have no more than 2dBi gain, 30% efficiencies) means it can deliver much longer range over a wide sector. Typical applications are • Access Points • Tablets • High definition high throughput video streaming routers • High data MIMO bandwidth routers • Automotive • Home and industrial in-wall WiFi automation • Drones/Quad-copters • UAV • Long range WiFi remote control applications The WDP patch antenna has two distinct linear polarizations, on the 2.4 and 5GHz bands, increasing isolation between bands. -

Development of Earth Station Receiving Antenna and Digital Filter Design Analysis for C-Band VSAT
INTERNATIONAL JOURNAL OF SCIENTIFIC & TECHNOLOGY RESEARCH VOLUME 3, ISSUE 6, JUNE 2014 ISSN 2277-8616 Development of Earth Station Receiving Antenna and Digital Filter Design Analysis for C-Band VSAT Su Mon Aye, Zaw Min Naing, Chaw Myat New, Hla Myo Tun Abstract: This paper describes the performance improvement of C-band VSAT receiving antenna. In this work, the gain and efficiency of C-band VSAT have been evaluated and then the reflector design is developed with the help of ICARA and MATLAB environment. The proposed design meets the good result of antenna gain and efficiency. The typical gain of prime focus parabolic reflector antenna is 30 dB to 40dB. And the efficiency is 60% to 80% with the good antenna design. By comparing with the typical values, the proposed C-band VSAT antenna design is well optimized with gain of 38dB and efficiency of 78%. In this paper, the better design with compromise gain performance of VSAT receiving parabolic antenna using ICARA software tool and the calculation of C-band downlink path loss is also described. The particular prime focus parabolic reflector antenna is applied for this application and gain of antenna, radiation pattern with far field, near field and the optimized antenna efficiency is also developed. The objective of this paper is to design the downlink receiving antenna of VSAT satellite ground segment with excellent gain and overall antenna efficiency. The filter design analysis is base on Kaiser window method and the simulation results are also presented in this paper. Index Terms: prime focus parabolic reflector antenna, satellite, efficiency, gain, path loss, VSAT. -

Arrays: the Two-Element Array
LECTURE 13: LINEAR ARRAY THEORY - PART I (Linear arrays: the two-element array. N-element array with uniform amplitude and spacing. Broad-side array. End-fire array. Phased array.) 1. Introduction Usually the radiation patterns of single-element antennas are relatively wide, i.e., they have relatively low directivity. In long distance communications, antennas with high directivity are often required. Such antennas are possible to construct by enlarging the dimensions of the radiating aperture (size much larger than ). This approach, however, may lead to the appearance of multiple side lobes. Besides, the antenna is usually large and difficult to fabricate. Another way to increase the electrical size of an antenna is to construct it as an assembly of radiating elements in a proper electrical and geometrical configuration – antenna array. Usually, the array elements are identical. This is not necessary but it is practical and simpler for design and fabrication. The individual elements may be of any type (wire dipoles, loops, apertures, etc.) The total field of an array is a vector superposition of the fields radiated by the individual elements. To provide very directive pattern, it is necessary that the partial fields (generated by the individual elements) interfere constructively in the desired direction and interfere destructively in the remaining space. There are six factors that impact the overall antenna pattern: a) the shape of the array (linear, circular, spherical, rectangular, etc.), b) the size of the array, c) the relative placement of the elements, d) the excitation amplitude of the individual elements, e) the excitation phase of each element, f) the individual pattern of each element. -

Log Periodic Antenna
TE0321 - ANTENNA & PROPAGATION LABORATORY Laboratory Manual DEPARTMENT OF TELECOMMUNICATION ENGINEERING SRM UNIVERSITY S.R.M. NAGAR, KATTANKULATHUR – 603 203. FOR PRIVATE CIRCULATION ONLY ALL RIGHTS RESERVED SRM UNIVERSITY Faculty of Engineering & Technology Department of Telecommunication Engineering S. No CONTENTS Page no. Introduction – antenna & Propagation 1 6 Arranging the trainer & Performing functional Checks List of Experiments 1 12 Performance analysis of Half wave dipole antenna 2 15 Performance analysis of Folded dipole antenna 3 19 Performance analysis of Loop antenna 4 23 Performance analysis of Yagi ‐Uda antenna 5 38 Performance analysis of Helix antenna 6 41 Performance analysis of Slot antenna 7 44 Performance analysis of Log periodic antenna 8 47 Performance analysis of Parabolic antenna 9 51 Radio wave propagation path loss calculations ANTENNA & PROPAGATION LAB INTRODUCTION: Antennas are a fundamental component of modern communications systems. By Definition, an antenna acts as a transducer between a guided wave in a transmission line and an electromagnetic wave in free space. Antennas demonstrate a property known as reciprocity, that is an antenna will maintain the same characteristics regardless if it is transmitting or receiving. When a signal is fed into an antenna, the antenna will emit radiation distributed in space a certain way. A graphical representation of the relative distribution of the radiated power in space is called a radiation pattern. The following is a glossary of basic antenna concepts. Antenna An antenna is a device that transmits and/or receives electromagnetic waves. Electromagnetic waves are often referred to as radio waves. Most antennas are resonant devices, which operate efficiently over a relatively narrow frequency band. -

The Impact of Sensor Positioning on the Array Manifold Adham Sleiman, Student Member, IEEE, and Athanassios Manikas, Senior Member, IEEE
IEEE TRANSACTIONS ON ANTENNAS AND PROPAGATION, VOL. 51, NO. 9, SEPTEMBER 2003 2227 The Impact of Sensor Positioning on the Array Manifold Adham Sleiman, Student Member, IEEE, and Athanassios Manikas, Senior Member, IEEE Abstract—A framework is presented in this study which the importance or relevance of a sensor’s position in the array analyzes the importance of each sensor in an antenna array for an application-specific criterion in the area of detection and based on its location in the overall geometry. Moving away from resolution capabilities of the array have been investigated in [1], the conventional methods of measuring sensor importance by means of application-specific criteria, a new approach, based [2]. Other criteria have lead to the design of arrays with the aim on the array manifold and its differential geometry, is used to of maximizing the mainlobe to sidelobe ratio while minimizing measure the significance of each sensor’s position in an array. By the 3 dB range of the mainlobe through Fourier, Dolph–Cheby- considering two-dimensional manifolds (function of azimuth and shev, Taylor and other synthesis techniques [3]–[8]. elevation angles) of planar arrays of isotropic sensors, and by using previously established results on the differential geometry By realising that the performance of an array system under a of such manifolds, a sensitivity analysis is performed which specific application is closely related to the manifold subtended leads to characterization and quantification of sensor location by this array, it becomes apparent that the importance of a sensor importance in an array geometry. Based on this framework, a criterion is developed for assessing an overall geometry. -
Design and Analysis of Microstrip Patch Antenna Arrays
Design and Analysis of Microstrip Patch Antenna Arrays Ahmed Fatthi Alsager This thesis comprises 30 ECTS credits and is a compulsory part in the Master of Science with a Major in Electrical Engineering– Communication and Signal processing. Thesis No. 1/2011 Design and Analysis of Microstrip Patch Antenna Arrays Ahmed Fatthi Alsager, [email protected] Master thesis Subject Category: Electrical Engineering– Communication and Signal processing University College of Borås School of Engineering SE‐501 90 BORÅS Telephone +46 033 435 4640 Examiner: Samir Al‐mulla, Samir.al‐[email protected] Supervisor: Samir Al‐mulla Supervisor, address: University College of Borås SE‐501 90 BORÅS Date: 2011 January Keywords: Antenna, Microstrip Antenna, Array 2 To My Parents 3 ACKNOWLEGEMENTS I would like to express my sincere gratitude to the School of Engineering in the University of Borås for the effective contribution in carrying out this thesis. My deepest appreciation is due to my teacher and supervisor Dr. Samir Al-Mulla. I would like also to thank Mr. Tomas Södergren for the assistance and support he offered to me. I would like to mention the significant help I have got from: Holders Technology Cogra Pro AB Technical Research Institute of Sweden SP I am very grateful to them for supplying the materials, manufacturing the antennas, and testing them. My heartiest thanks and deepest appreciation is due to my parents, my wife, and my brothers and sisters for standing beside me, encouraging and supporting me all the time I have been working on this thesis. Thanks to all those who assisted me in all terms and helped me to bring out this work. -

University of Cincinnati
UNIVERSITY OF CINCINNATI _____________ , 20 _____ I,______________________________________________, hereby submit this as part of the requirements for the degree of: ________________________________________________ in: ________________________________________________ It is entitled: ________________________________________________ ________________________________________________ ________________________________________________ ________________________________________________ Approved by: ________________________ ________________________ ________________________ ________________________ ________________________ Digital Direction Finding System Design and Analysis A thesis submitted to the Division of Graduate Studies and Research of the University of Cincinnati in partial fulfillment of the requirements for the degree of MASTER OF SCIENCE (M.S.) in the Department of Electrical & Computer Engineering and Computer Science of the College of Engineering 2003 by Huazhou Liu B.E., Xi’an Jiaotong University P. R. China, 2000 Committee Chair: Professor Howard Fan ABSTRACT Direction Finding (DF) system is used in many military and civilian operations such as surveillance, reconnaissance, and rescue, etc. In the past years, direction finding system is implemented usually using analog RF techniques such as Butler matrix and analog beamforming. Analog direction finding systems have drawbacks inherent from their analog properties such as expensive implementation, inflexibility to adjust or change functionality, intensive calibration procedures and