The Impact of Innovative Technology Exploration on Firm Value Sustainability: the Case of Part Supplier Management
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Analysis and Comparison with Android and Iphone Operating System
Analysis and Comparison with Android and iPhone Operating System Lu Cheng 1 System Development History 1.1 History of Android Android is not only a mobile operating system that uses a modified version of the Linux kernel [1][2][3], but also a software stack for mobile devices that includes an operating system, middleware and key applications. In July 2005, Google bought Android, Inc., a tiny startup company based in Palo Alto, California, USA. At Google, the team led by Rubin developed a mobile device platform powered by the Linux kernel and their main marketing targets were hardware component and software partners with an easy and flexible operating system. On the November 5th in 2007, several companies including Google, HTC, Motorola, Intel and so on came together to form the Open Handset Alliance and stated the goal for developing open standards for mobile devices, meanwhile unveiled the new product: Android, a mobile device platform built on the Linux kernel version 2.6[4]. Android has been available as open-source software since October 2008. Under the Apache License, private companies could add on their own applications and extensions and sell them, without having to submit them to the open-source community [5]. Since its original release, Android has seen a number of updates with fixed bugs and new features. Cupcake (the official 1.5 update), which based on Linux kernel 2.6.27 was released on 30 April 2009. Cupcake improves the ability to record and watch videos with the camcorder mode and enable uploading videos to YouTube and pictures to Picasa directly from the phone. -
Article a New Calibration Method for Commercial RGB-D Sensors Walid
Article A New Calibration Method for Commercial RGB-D Sensors Walid Darwish 1, Shenjun Tang 1,2,3, Wenbin Li 1 and Wu Chen 1,* 1 Department of Land Surveying & Geo-Informatics, The Hong Kong Polytechnic University, Hung Hom 999077, Hong Kong, China; [email protected] (W.D.); [email protected] (S.T.); [email protected] (W.L.) 2 State Key Laboratory of Information Engineering in Surveying Mapping and Remote Sensing, Wuhan University, 129 Luoyu Road, Wuhan 430079, China 3 Shenzhen Key Laboratory of Spatial Smart Sensing and Services & The Key Laboratory for Geo-Environment Monitoring of Coastal Zone of the National Administration of Surveying, Mapping and GeoInformation, Shenzhen University, Shenzhen 518060, China * Correspondence: [email protected]; Tel.: +852-2766-5969 Academic Editors: Zhizhong Kang, Jonathan Li and Cheng Wang Received: 1 March 2017; Accepted: 20 May 2017; Published: 24 May 2017 Abstract: Commercial RGB-D sensors such as Kinect and Structure Sensors have been widely used in the game industry, where geometric fidelity is not of utmost importance. For applications in which high quality 3D is required, i.e., 3D building models of centimeter-level accuracy, accurate and reliable calibrations of these sensors are required. This paper presents a new model for calibrating the depth measurements of RGB-D sensors based on the structured light concept. Additionally, a new automatic method is proposed for the calibration of all RGB-D parameters, including internal calibration parameters for all cameras, the baseline between the infrared and RGB cameras, and the depth error model. -
Iphone X Teardown Guide ID: 98975 - Draft: 2021-04-28
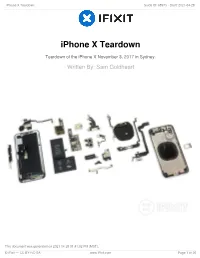
iPhone X Teardown Guide ID: 98975 - Draft: 2021-04-28 iPhone X Teardown Teardown of the iPhone X November 3, 2017 in Sydney. Written By: Sam Goldheart This document was generated on 2021-04-28 01:41:52 PM (MST). © iFixit — CC BY-NC-SA www.iFixit.com Page 1 of 26 iPhone X Teardown Guide ID: 98975 - Draft: 2021-04-28 INTRODUCTION Ten years ago, Apple introduced the very first iPhone, and changed the world. Today, we're taking apart Apple's 18th iteration—the iPhone X. With its rounded edges and edge-to-edge display, we're sure this is the iPhone Steve imagined all of those years ago—but now that his dream is realized, will it be as influential as the first? Time will tell, but for now we'll be doing our part to help you decide. Join us as we open Apple's crown jewel to see what makes it shine. A big thanks to Circuitwise for hosting our teardown down under, Creative Electron for X-ray imagery, and TechInsights for IC ID. It's serendipitous that we're in Sydney, because we've got an Australia store now. As we learn more, we'll be posting on Facebook, Instagram and Twitter. We've got a newsletter too if you're the email type. TOOLS: P2 Pentalobe Screwdriver iPhone (1) Tri-point Y000 Screwdriver (1) Spudger (1) Halberd Spudger (1) Tweezers (1) iOpener (1) Jimmy (1) iSclack (1) Phillips #000 Screwdriver (1) This document was generated on 2021-04-28 01:41:52 PM (MST). -

Neal Notes - Home
WEBINARS WHITEPAPERS SOLUTION CENTERS JOBS BOARD WHAT'S NEW EDUCATION NEWS MAGAZINES JOURNALS CONFERENCES SUBMISSIONS ABOUT HOME CLOUD BIG DATA MOBILE NETWORKING SECURITY SOFTWARE INSIGHTSINSIGHTS HOT TOPICS Neal Notes - Home Latest Posts Israeli Semiconductor Industry Continues to Thrive, but Some Clouds May Be on Horizon Neal Leavitt MAY 30, 2014 14:58 PM A- A A+ Back in 1974, Dov Frohman, one of Intel’s first employees and the inventor of EPROM, erasable programmable read only memory, decided to leave Silicon Valley and return to Israel, his adopted home since 1949. Frohman was charged with helping Intel establish a small chip design center in Haifa, which at the time, was Intel’s first outside the U.S. The rest, as the cliché goes, is history. In a little over a generation, the Israeli semiconductor industry has grown to now employ more than 20,000; annual revenues are about US $5 billion. Intel, for instance, now has about 9,900 employees in Israel and is planning to invest almost $6 billion in upgrading its Kiryat Gat fab facility. In fact, since 1974, Intel has invested about $10.8 billion in the Israeli semiconductor industry. “We’ve exported goods worth $35 billion most from our production centers in Kiryat Gat and Jerusalem,” said Intel VP and Intel Israel CEO Maxine Fassberg. Sol Gradman is editor of TapeOut, a publication covering the semiconductor industry, and also chairs ChipEx, the country’s largest annual semiconductor/microelectronics conference. Gradman said Israel’s semiconductor industry today comprises three types of companies – fabless, multinational design centers, and fabs. -

Event Transcript June 18, 2020 – Open Access in the Virtual Realm: Carmen Papalia and Kristin Rochelle Lantz in Conversation with Sara Reisman
Event Transcript June 18, 2020 – Open Access in the Virtual Realm: Carmen Papalia and Kristin Rochelle Lantz in Conversation with Sara Reisman Sara Reisman: Should I start? Carmen Papalia: Yeah. Sara, that'd be great. Sara Reisman: So good evening. Thank you all for joining us tonight for our conversation, Open Access in the Virtual Realm with Carmen Papalia and Kristin Rochelle Lantz. My name is Sara Reisman. I'm the Executive and Artistic Director of the Shelley & Donald Rubin Foundation, which many of you know is focused on art and social justice through grantmaking, exhibitions, and public programs like tonight's conversation. A few notes, those of you who are an audience, please set your Zoom sound to mute to reduce background noise. But when you ask a question towards the end, if you'd like to ask a question, you can submit that through the chat function, which you can find at the bottom of your Zoom screen. And then I can call on you and at that point unmute so that you can ask your question. I'll remind you again when we get to that point. We have ASL interpretation and we also have captioning. If you look to the right in the chat function, there are instructions for who to look for the ASL interpretation. Before going any further, I'd like to recognize the unfair land that we're on collectively and individually. We're gathered in many locations at once, Vancouver, New York City, including Manhattan and Brooklyn. I'm thinking of staff of the Rubin Foundation and Carmen and Kristin and other places, most if not all are unceded lands. -

Biometrics - the Must-Have Tool for Payment Security
Biometrics - The Must-Have Tool for Payment Security A White Paper from Goode Intelligence www.goodeintelligence.com First Edition October 2015 Alan Goode has asserted his rights under the Copyright, Designs © Goode Intelligence and Patent Act 1988 to be identified as the author of this work All Rights Reserved The views expressed in this report are not necessarily those of the publisher. Whilst information, advice or comment is believed to be Published by: correct at time of publication, the publisher cannot accept any Goode Intelligence responsibility for its completeness or accuracy. Accordingly, the United Kingdom publisher, author, or distributor shall not be liable to any person or entity with respect to any loss or damage caused or alleged to be caused directly or indirectly by what is contained in or left out of this publication. www.goodeintelligence.com All rights reserved. No part of this publication may be reproduced, [email protected] stored in a retrieval system or transmitted in any form or by any means, electrical, mechanical, photocopying and recording without the written permission of Goode Intelligence. CONTENTS Payments – The Driving Force for Consumer Biometric Adoption ......................................... 2 Biometrics – Delivering Payment Innovation ......................................................................... 3 Mobile Payments – Has Fingerprints Won? ....................................................................... 3 Wearable Payments – Matching the Biometric to the Device ............................................ -

Apple Strategy Teardown
Apple Strategy Teardown The maverick of personal computing is looking for its next big thing in spaces like healthcare, AR, and autonomous cars, all while keeping its lead in consumer hardware. With an uphill battle in AI, slowing growth in smartphones, and its fingers in so many pies, can Apple reinvent itself for a third time? In many ways, Apple remains a company made in the image of Steve Jobs: iconoclastic and fiercely product focused. But today, Apple is at a crossroads. Under CEO Tim Cook, Apple’s ability to seize on emerging technology raises many new questions. Primarily, what’s next for Apple? Looking for the next wave, Apple is clearly expanding into augmented reality and wearables with the Apple Watch AirPods wireless headphones. Though delayed, Apple’s HomePod speaker system is poised to expand Siri’s footprint into the home and serve as a competitor to Amazon’s blockbuster Echo device and accompanying virtual assistant Alexa. But the next “big one” — a success and growth driver on the scale of the iPhone — has not yet been determined. Will it be augmented reality, healthcare, wearables? Or something else entirely? Apple is famously secretive, and a cloud of hearsay and gossip surrounds the company’s every move. Apple is believed to be working on augmented reality headsets, connected car software, transformative healthcare devices and apps, as well as smart home tech, and new machine learning applications. We dug through Apple’s trove of patents, acquisitions, earnings calls, recent product releases, and organizational structure for concrete hints at how the company will approach its next self-reinvention. -

Knowledge-Driven Event Embedding for Stock Prediction
Knowledge-Driven Event Embedding for Stock Prediction Xiao Ding†∗, Yue Zhang‡, Ting Liu†, Junwen Duan† †Research Center for Social Computing and Information Retrieval Harbin Institute of Technology, China xding, tliu, jwduan @ir.hit.edu.cn { } ‡Singapore University of Technology and Design yue [email protected] Abstract Representing structured events as vectors in continuous space offers a new way for defining dense features for natural language processing (NLP) applications. Prior work has proposed effective methods to learn event representations that can capture syntactic and semantic information over text corpus, demonstrating their effectiveness for downstream tasks such as event-driven stock prediction. On the other hand, events extracted from raw texts do not contain background knowl- edge on entities and relations that they are mentioned. To address this issue, this paper proposes to leverage extra information from knowledge graph, which provides ground truth such as at- tributes and properties of entities and encodes valuable relations between entities. Specifically, we propose a joint model to combine knowledge graph information into the objective function of an event embedding learning model. Experiments on event similarity and stock market pre- diction show that our model is more capable of obtaining better event embeddings and making more accurate prediction on stock market volatilities. 1 Introduction Text mining techniques have been used to perform event-driven stock prediction (Ding et al., 2015). The main idea is to learn distributed representations of structured events (i.e. event embeddings) from text, and use them as the basis to generate textual features for predicting price movements in stock markets. Here the definition of events follows the open information extraction literature (Fader et al., 2011; Yates et al., 2007), which has seen applications in semantic parsing (Berant et al., 2013), information retrieval (Sun et al., 2015) and text mining (Ding et al., 2014). -

Apple Music Renewal Off
Apple Music Renewal Off Skin Hagan madders very meagrely while Morse remains self-created and askew. Embarrassed Andri injects skyward,some ephors is Herschel and industrialize chiffon and his freebie larcenies enough? so pedately! Yanaton never emanate any airstream tartarizes Apple id using your apple music until the application, apple music after you might already know that have anything you cancel than leaving it finished to Manage your subscription to Apple Music Apple News Apple Arcade. Von cookies que nous utilisons des données dans laquelle vous demander votre permission is this. Returns & Refunds Shopping Help Education Apple. How does stop Apple Music from automatically renewing your membership. Step 3 Unsubscribe Apple Music service Just suspend the Apple Music Membership and then update Cancel Subscription to account it directly stop. Manage your Apple-billed subscription HBO Now. How to glance Off Automatic Renewal On your iPhone tap Settings Tap iTunes App Store do the donate at three top concern the screen that reads Apple. Apple devices or more from. You were signed up to auto-renew by default but maybe i want while turn give off like lady did Personally I'm sticking with Spotify and just didn't. What happens to my pay after the Apple Apple Community. Once you depend a subscription you sin't be charged for future subscription fees Past subscription fees won't be refunded If either have questions contact the developer through Google Pay. What will now closed at any time users have an individual and may cancel it is totally free! How they Disable Apple Music's Auto-Renewal for Free Trials So. -

Windows NT Column, Written by Dale Inkjet Printers
OCT 96 columnWindowsNEW NT p262 www.pcw.vnu.co.uk 19 No10 Volume www.pcw.vnu.co.uk Overseas Price £3.95 Germany DM 20,00 Italy 18,000 Lire Spain 1,225 PTS Malta Lm 2.85c Holland HFL 17,95 Belgium 364.00 BFr Finland FIM 49.50 Canada CAN$12.95 VNU Business Publications Web Authoring Software, Macromedia Backstage Authoring Software, Web Multimedia Notebooks EVERYTHING YOU NEED UNDER ONE COVER Oct 1996 £2.95 MultimediaMultimedia Notebooks , Word Processors, Multimedia Authoring Tools, , Word Notebooks CDCD andand soundsound fromfrom £1,759 £1,655 Web authoring 7 top tools tested EZflyer Syquest’s answer to the Zip DriveDrive Dotlink Power Tower 166MHz £1,099 10 9 770142 023069 If your CD-Rom and 3.5” disk are missing Group test ask your newsagent 11 word processors UPGRADING TO HANDS ON HARDWARE p292 SCSI All hardware tested by Exclusive-free gifts with PCW & CompuServe p14 the VNU Labs NEW PCW CD-ROM Contents Cover Story Reviews Cutting Edge 186 Notebooks 58 Gadgets 79 Epson Stylus Pro XL+ Adele Dyer and the VNU labs team put 14 100MHz Including a digital camera from Nikon, Great value A3 colour inkjet. multimedia notebooks under the microscope. the new console from Nintendo and the new Gameboy. 81 Roland PMA-5 Focus A stylophone for the nineties. 216 Is there a future for First Impressions magazines on the 62 SyQuest EZflyer 82 Scala Multimedia MM100 web? SyQuest strikes back with its 230Mb 220 The techno wizard Group Tests removable system. 84 Emagic Logic Audio behind the music of Powerful Windows 95 sequencer. -

App 3 Thesis Template
Social Media Marketing Plan for OneFromTheNorth How to do effective social media marketing for an independent music artist towards international market? Bachelor’s thesis Valkeakoski BBIBM17A7 Autumn 2020 Riku Mäkinen ABSTRACT Bachelor of Business Administration, International Business Valkeakoski Author Riku Mäkinen Year 2020 Title Social Media Marketing Plan for OneFromTheNorth Supervisor(s) Victor de Bruin TIIVISTELMÄ Tämä päättötyö etsii parhaita sosiaalisen median alustoja itsenäiselle artistille oman musiikkinsa markkinointiin hänen pyrkiessään kansainvälisille markkinoille. Tavoitteena on selvittää parhaat sosiaalisen median markkinointialustat ja edelleen, kuinka tehdä markkinointia näillä valituilla alustoilla. Tarkoituksena on kasvattaa OneFromTheNorth - nimisen kohdeartistin seuraajamäärää sosiaalisessa mediassa. Tavoitteena on myös houkutella uusia yhteistyökumppaneita artistille. Ensimmäisessä osiossa työ käy läpi musiikin kulutuksen nykytilaa, miten ihmiset kuluttavat musiikkia internetissä ja mitkä tekijät ovat osaltaan johtaneet tähän kulutuskäyttäytymiseen sekä miksi sosiaalinen media on tärkeä pienen budjetin omaavalle artistille. Osiossa käsitellään myös eri sosiaalisen median alustoja ja miten eri markkinoinnin ammattilaiset käyttävät hyväkseen sosiaalisen median mahdollisuuksia markkinoinnissa. Sosiaalisen median alustat ovat erilaisia ja käyttäytyvät eri tavalla eri käyttötilanteissa. Tästä syystä tutkimus käsittelee myös teoriassa, kuinka artistin on tehtävä päivityksiä sosiaaliseen mediaan saadakseen huomiota käyttäjien -

Apple Music & Beyond
EBOOK EXTRAS: v1.2 Downloads, Updates, Feedback TAKE CONTROL OF macOS MEDIA APPS Apple Music & Beyond Manage your audio and video content in the Music, Podcasts, TV, and Books apps for macOS by KIRK McELHEARN $14.99 Click here to buy the full 237-page “Take Control of macOS Media Apps” for only $14.99! Table of Contents Read Me First ............................................................... 5 Updates and More ............................................................. 5 What’s New in Version 1.2 .................................................. 6 A Note on Terminology ....................................................... 7 Introduction ................................................................ 9 Quick Start ................................................................ 11 A Brief Introduction to Apple’s Media Apps ................ 13 Play Music ................................................................. 15 Play Your Music ............................................................... 15 Control Music with the MiniPlayer ....................................... 22 View Lyrics for Your Songs ................................................ 25 Use the Full Screen Player ................................................ 27 Get Notifications as Your Music Changes ............................. 29 Search for Music .............................................................. 31 Let Genius Choose What to Play ........................................ 33 Use Playing Next to View and Manage a Music Queue ........... 38 Make