Theory, Construction, and Operation
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
US2510669.Pdf
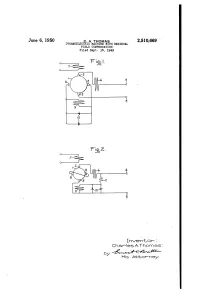
June 6, 1950 C. A. THOMAS 2,510,669 DYNAMOELECTRICMACHINE WITH RESIDUAL FIELD COMPENSATION Filed Sept. 15, 1949 InN/entor : Charles A.Thomas : -2-YHis attorney. 213-4- - Patented June 6, 1950 2,510,669 UNITED STATES PATENT OFFICE 2,510,669 DYNAMoELECTRIC MACHINE WITH RESD UAL FIELD coMPENSATION Charles A. Thomas, Fort Wayne, Ind., assignor - to General Electric Company, a corporation of New York Application September 15, 1949, Serial No. 115,907 2 Claims. (Cl. 322-79) 2 My invention relates to dynamoelectric ma volves added expense and requires additional chines incorporating means for eliminating field maintenance. excitation which is due to residual magnetism It is, therefore, another object of my inven in the field and, more particularly, to dynamo tion to provide a dynamoelectric machine in electric machines having residual field Com Corporating a residual field compensator which pensating windings and associated non-linear does not require additional Switches or auxiliary impedance elements for rendering said windings contacts, but which is, nevertheless, effective inoperative when not required, without the use during periods of zero field excitation by the of switches. control field Windings and ineffective when the in certain types of dynamoelectric machines, O control windings supply excitation. the presence of the usual residual magnetization My invention, therefore, Consists essentially remaining in the field poles of the machine after of a dynamoelectric machine having a residual field excitation has been removed is undesired magnetization compensator which includes a and troublesone. This is especially true in ar- . compensator field winding connected in the air nature reaction excited dynamoelectric ma 5 nature circuit of the machine and associated chines having compensation for secondary ar non-linear impedance elements to render the nature reaction and commonly known as ampli winding ineffective when normal field excitation dynes. -

Nikola Tesla
Nikola Tesla Nikola Tesla Tesla c. 1896 10 July 1856 Born Smiljan, Austrian Empire (modern-day Croatia) 7 January 1943 (aged 86) Died New York City, United States Nikola Tesla Museum, Belgrade, Resting place Serbia Austrian (1856–1891) Citizenship American (1891–1943) Graz University of Technology Education (dropped out) ‹ The template below (Infobox engineering career) is being considered for merging. See templates for discussion to help reach a consensus. › Engineering career Electrical engineering, Discipline Mechanical engineering Alternating current Projects high-voltage, high-frequency power experiments [show] Significant design o [show] Awards o Signature Nikola Tesla (/ˈtɛslə/;[2] Serbo-Croatian: [nǐkola têsla]; Cyrillic: Никола Тесла;[a] 10 July 1856 – 7 January 1943) was a Serbian-American[4][5][6] inventor, electrical engineer, mechanical engineer, and futurist who is best known for his contributions to the design of the modern alternating current (AC) electricity supply system.[7] Born and raised in the Austrian Empire, Tesla studied engineering and physics in the 1870s without receiving a degree, and gained practical experience in the early 1880s working in telephony and at Continental Edison in the new electric power industry. He emigrated in 1884 to the United States, where he became a naturalized citizen. He worked for a short time at the Edison Machine Works in New York City before he struck out on his own. With the help of partners to finance and market his ideas, Tesla set up laboratories and companies in New York to develop a range of electrical and mechanical devices. His alternating current (AC) induction motor and related polyphase AC patents, licensed by Westinghouse Electric in 1888, earned him a considerable amount of money and became the cornerstone of the polyphase system which that company eventually marketed. -

Rotating Magnetic Field in Induction Motor
Rotating Magnetic Field in AC Machines 1 Introduction In a DC machine, the stator winding is excited by DC current and hence the field produced by this wind- ing is time invariant in nature. In this machine the conversion of energy from electrical to mechanical form or vice versa is possible by one of the following ways: 1. rotating the rotor in the field produced by the stator 2. feeding external dc current through carbon brushes to the rotor 2 Pre-lab questions Let, XX = Last two digits of your roll number g1(t) = cos(!t) and g2(t; θ) = cos(!t) cos(θ) 1. Take ! = 2πf, where f = XX × 50. Vary !t from 0 to 2π. Plot g1(t) vs t using MATLAB (or any other suitable software) 2. Take ! = 2πf, where f = XX × 50. Vary !t from 0 to 2π. Take θ = 0 to 2π. Plot g2(t; θ) vs t; for θ = XX Plot g2(t; θ) vs θ; for !t = 0; π=4; π=2; 2π=3 3 Theory Now consider three coils A, B and C of N turns each, displaced in space by 120◦ and connected to a balanced 3 phase system as shown in Fig. 1. (Note that the stator winding of 3 phase induction machine is distributed in a large number of slots as shown in Fig. 2). The expressions for the current Figure 1: Coil arrangement to produce rotating magnetic field 1 drawn by these coils are given by: ia = I sin(!st) o ib = I sin(!st + 120 ) (1) o ic = I sin(!st + 240 ) where !s = 2πF1 is supply frequency in rad/s and F1 is supply frequency in Hertz. -

Lyall Cooper Dr. Dann ASR – D Block 10 May 2012 the Mighty Railgun I. Abstract the Idea of This Project Is to Build a Railgun
Lyall Cooper Dr. Dann ASR – D Block 10 May 2012 The Mighty Railgun (All Bark no Bite) I. Abstract The idea of this project is to build a railgun capable of firing a small metal projectile at substantial velocity. The original plan was to build iterative prototypes capable of firing small projectiles, and using them to figure out the ideal design for the final version, but the smaller versions were not very successful due to their relative lack of power, so it was difficult to use them to learn what to do. The final, largest scale railgun is powered by a bank of capacitors with an equivalent capacitance of 24.6mF charged to around 350V. This produces 3013.5J of energy discharged over approximately 58.75 µs (it varies for each firing), drawing a peak of about 1425A when firing a projectile (it once again varies) and about 1600A when not firing a projectile (short circuiting the rails). The railgun is capable of consistently firing a small piece of metal (usually aluminum or copper); however the projectile does not usually travel very far, although this is hard to measure due to the nature of the gun and the speed at which the firing takes place. II. Introduction Electricity is often seemingly mysterious, but we have come to accept and understand how through the interaction of electric and magnetic fields we can create a simple motor, as we did in the first semester. A railgun is just a linear electric motor, at very high speeds. What makes it different, however, is that it uses neither magnets nor coils of wire, and relies entirely on the induced magnetic field in the rails due to the extremely large current to produce a Lorentz Force to propel the projectile (which will be discussed in greater depth in the theory section). -

Alternator Winding Temperature Rise in Generator Systems
TM Information Sheet # 55 Alternator Winding Temperature Rise in Your Reliable Guide for Power Solutions Generator Systems 1.0 Introduction: When a wire carries electrical current, its temperature will increase due to the resistance of the wire. The factor that mostly influences/ limits the acceptable level of temperature rise is the insulation system employed in an alternator. So the hotter the wire, the shorter the life expectancy of the insulation and thus the alternator. This information sheets discusses how different applications influence temperature rise in alternator windings and classification standards are covered by the National electrical Manufacturers Association (NEMA). (Continued over) Table 1 - Maximum Temperature Rise (40°C Ambient) Continuous Temperature Rise Class A Class B Class F Class H Temp. Rise °C 60 80 105 125 Temp. Rise °F 108 144 189 225 Table 2 - Maximum Temperature Rise (40°C Ambient) Standby Temperature Rise Class A Class B Class F Class H Temp. Rise °C 85 105 130 150 Temp. Rise °F 153 189 234 270 Typical Windings Within a Generator Set’s Alternator Excitor windings Stator windings Rotor windings To fulfill our commitment to be the leading supplier and preferred service provider in the Power Generation Industry, the Clifford Power Systems, Inc. team maintains up-to-date technology and information standards on Power Industry changes, regulations and trends. As a service, our Information Sheets are circulated on a regular basis, to existing and potential Power Customers to maintain awareness of changes and -

High Speed Linear Induction Motor Efficiency Optimization
Calhoun: The NPS Institutional Archive Theses and Dissertations Thesis Collection 2005-06 High speed linear induction motor efficiency optimization Johnson, Andrew P. (Andrew Peter) http://hdl.handle.net/10945/11052 High Speed Linear Induction Motor Efficiency Optimization by Andrew P. Johnson B.S. Electrical Engineering SUNY Buffalo, 1994 Submitted to the Department of Ocean Engineering and the Department of Electrical Engineering and Computer Science in Partial Fulfillment of the Requirements for the Degree of Naval Engineer and Master of Science in Electrical Engineering and Computer Science at the Massachusetts Institute of Technology June 2005 ©Andrew P. Johnson, all rights reserved. MIT hereby grants the U.S. Government permission to reproduce and to distribute publicly paper and electronic copies of this thesis document in whole or in part. Signature of A uthor ................ ............................... D.epartment of Ocean Engineering May 7, 2005 Certified by. ..... ........James .... ... ....... ... L. Kirtley, Jr. Professor of Electrical Engineering // Thesis Supervisor Certified by......................•........... ...... ........................S•:• Timothy J. McCoy ssoci t Professor of Naval Construction and Engineering Thesis Reader Accepted by ................................................. Michael S. Triantafyllou /,--...- Chai -ommittee on Graduate Students - Depa fnO' cean Engineering Accepted by . .......... .... .....-............ .............. Arthur C. Smith Chairman, Committee on Graduate Students DISTRIBUTION -

Appendix B: Soft Starter Application Considerations BBB
AAPPENDIXPPENDIX APPENDIX B: SOFT STARTER APPLICATION CONSIDERATIONS BBB TABLE OF CONTENTS Appendix B: Soft Starter Application Considerations �� � � � � � � � � � � � � � � � � � � � � � � B–1 B�1 – Motor Suitability and Associated Considerations� � � � � � � � � � � � � � � � � � � � � B–2 B�1�1 – Suitability� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � B–2 B�1�2 – Induction Motor Characteristics �� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � B–2 B�1�3 – Rating� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � B–2 B�1�4 – Maximum Motor Cable Length� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � B–3 B�1�5 – Power Factor Correction Capacitors �� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � B–3 B�1�6 – Lightly Loaded Small Motors � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � B–3 B�1�7 – Motors Installed with Integral Brakes � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � B–3 B�1�8 – Older Motors� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � B–3 B�1�9 – Wound-rotor or Slip-ring Motors � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � B–3 B�1�10 – Enclosures � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � B–3 B�1�11 – Efficiency �� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � B–4 B�1�12 – High-Efficiency Motors � � � � � � -

Parameters Effects on Force in Tubular Linear Induction Motors with Blocked Rotor
Proc. of the 5th WSEAS/IASME Int. Conf. on Electric Power Systems, High Voltages, Electric Machines, Tenerife, Spain, December 16-18, 2005 (pp92-97) Parameters Effects on Force in Tubular Linear Induction Motors with Blocked Rotor REZA HAGHMARAM(1,2), ABBAS SHOULAIE(2) (1) Department of Electrical Engineering, Imam Hosein University, Babaie Highway, Tehran (2) Department of Electrical Engineering, Iran University of Science & Technology, Narmak, Tehran IRAN Abstract: This paper is concerned with the study of several parameters effects on longitudinal force applied on the rotor in the generator driven air-core tubular linear induction motors with blocked rotor. With developing the motor modeling by involving temperature equations in the previous computer code, we first study variations of the coils and rings temperatures and the effect of the temperature on the rotor force. In the next section, the effect of the rotor length on the rotor force is studied and it is shown that there is an almost linear relation between the rotor length and the rotor force. Finally we have given the optimum time step for solving the state equations of the motor and calculating the force. By this time step the code will have reasonable speed and accuracy. These studies can be useful for the force motors and for finding a view for dynamic state analysis of the acceleration motors. Keywords: - Air Core Tubular Linear Induction Motor, Coilgun, Linear Induction Launcher 1 Introduction the value of coils and rings currents and calculating Tubular Linear Induction Motors (TLIMs) may the gradient of mutual inductance between coils and have unique applications as electromagnetic rings, we can calculate the force applied on the launchers with very high speed and acceleration rotor [3]. -

An Introductory Electric Motors and Generators Experiment for a Sophomore Level Circuits Course
AC 2008-310: AN INTRODUCTORY ELECTRIC MOTORS AND GENERATORS EXPERIMENT FOR A SOPHOMORE-LEVEL CIRCUITS COURSE Thomas Schubert, University of San Diego Thomas F. Schubert, Jr. received his B.S., M.S., and Ph.D. degrees in electrical engineering from the University of California, Irvine, Irvine CA in 1968, 1969 and 1972 respectively. He is currently a Professor of electrical engineering at the University of San Diego, San Diego, CA and came there as a founding member of the engineering faculty in 1987. He previously served on the electrical engineering faculty at the University of Portland, Portland OR and Portland State University, Portland OR and on the engineering staff at Hughes Aircraft Company, Los Angeles, CA. Prof. Schubert is a member of IEEE and ASEE and is a registered professional engineer in Oregon. He currently serves as the faculty advisor for the Kappa Eta chapter of Eta Kappa Nu at the University of San Diego. Frank Jacobitz, University of San Diego Frank G. Jacobitz was born in Göttingen, Germany in 1968. He received his Diploma in physics from the Georg-August Universität, Göttingen, Germany in 1993, as well as M.S. and Ph.D. degrees in mechanical engineering from the University of California, San Diego, La Jolla, CA in 1995 and 1998, respectively. He is currently an Associate Professor of mechanical engineering at the University of San Diego, San Diego, CA since 2003. From 1998 to 2003, he was an Assistant Professor of mechanical engineering at the University of California, Riverside, Riverside, CA. He has also been a visitor with the Centre National de la Recherche Scientifique at the Université de Provence (Aix-Marseille I), France. -
High Efficiency Megawatt Motor Conceptual Design
High Efficiency Megawatt Motor Conceptual Design Ralph H. Jansen, Yaritza De Jesus-Arce, Dr. Rodger Dyson, Dr. Andrew Woodworth, Dr. Justin Scheidler, Ryan Edwards, Erik Stalcup, Jarred Wilhite, Dr. Kirsten Duffy, Paul Passe and Sean McCormick NASA Glenn Research Center, Cleveland, Ohio, 44135 Advanced Air Vehicles Program Advanced Transport Technologies Project Motivation • NASA is investing in Electrified Aircraft Propulsion (EAP) research to improve the fuel efficiency, emissions, and noise levels in commercial transport aircraft • The goal is to show that one or more viable EAP concepts exist for narrow- body aircraft and to advance crucial technologies related to those concepts. • Electric Machine technology needs to be advanced to meet aircraft needs. Advanced Air Vehicles Program Advanced Transport Technologies Project 2 Outline • Machine features • Importance of electric machine efficiency for aircraft applications • HEMM design requirements • Machine design • Performance Estimate and Sensitivity • Conclusion Advanced Air Vehicles Program Advanced Transport Technologies Project 3 NASA High Efficiency Megawatt Motor (HEMM) Power / Performance • HEMM is a 1.4MW electric machine with a stretch performance goal of 16 kW/kg (ratio to EM mass) and efficiency of >98% Machine Features • partially superconducting (rotor superconducting, stator normal conductors) • synchronous wound field machine that can operate as a motor or generator • combines a self-cooled, superconducting rotor with a semi- slotless stator Vehicle Level Benefits • -

Direct Torque Control of Induction Motors
DIRECT TORQUE CONTROL FOR INDUCTION MOTOR DRIVES MAIN FEATURES OF DTC · Decoupled control of torque and flux · Absence of mechanical transducers · Current regulator, PWM pulse generation, PI control of flux and torque and co-ordinate transformation are not required · Very simple control scheme and low computational time · Reduced parameter sensitivity BLOCK DIAGRAM OF DTC SCHEME + _ s* s j s + Djs _ Voltage Vector s * T + j s DT Selection _ T S S S s Stator a b c Torque j s s E Flux vs 2 Estimator Estimator 3 s is 2 i b i a 3 Induction Motor In principle the DTC method selects one of the six nonzero and two zero voltage vectors of the inverter on the basis of the instantaneous errors in torque and stator flux magnitude. MAIN TOPICS Þ Space vector representation Þ Fundamental concept of DTC Þ Rotor flux reference Þ Voltage vector selection criteria Þ Amplitude of flux and torque hysteresis band Þ Direct self control (DSC) Þ SVM applied to DTC Þ Flux estimation at low speed Þ Sensitivity to parameter variations and current sensor offsets Þ Conclusions INVERTER OUTPUT VOLTAGE VECTORS I Sw1 Sw3 Sw5 E a b c Sw2 Sw4 Sw6 Voltage-source inverter (VSI) For each possible switching configuration, the output voltages can be represented in terms of space vectors, according to the following equation æ 2p 4p ö s 2 j j v = ç v + v e 3 + v e 3 ÷ s ç a b c ÷ 3 è ø where va, vb and vc are phase voltages. -

The Fundamentals of Ac Electric Induction Motor Design and Application
THE FUNDAMENTALS OF AC ELECTRIC INDUCTION MOTOR DESIGN AND APPLICATION by Edward J. Thornton Electrical Consultant E. I. du Pont de Nemours Houston, Texas and J. Kirk Armintor Senior Account Sales Engineer Rockwell Automation The Woodlands, Texas Edward J. (Ed) Thornton is an Electrical Electrical Mechanical Consultant in the Electrical Technology Coupling System Field System Consulting Group in Engineering at DuPont, in Houston, Texas. His specialty is the design, operation, and maintenance of electric power distribution systems and large motor installations. He has 20 years E , I T , w of consulting experience with DuPont. Mr. Thornton received his B.S. degree Figure 1. Block Representation of Energy Conversion for Motors. (Electrical Engineering, 1978) from Virginia Polytechnic Institute and State University. The coupling magnetic field is key to the operation of electrical He is a registered Professional Engineer in the State of Texas. apparatus such as induction motors. The fundamental laws associated with the relationship between electricity and magnetism were derived from experiments conducted by several key scientists J. Kirk Armintor is a Senior Account in the 1800s. Sales Engineer in the Rockwell Automation Houston District Office, in The Woodlands, Basic Design and Theory of Operation Texas. He has 32 years’ experience with The alternating current (AC) induction motor is one of the most motor applications in the petroleum, rugged and most widely used machines in industry. There are two chemical, paper, and pipeline industries. major components of an AC induction motor. The stationary or He has authored technical papers on motor static component is the stator. The rotating component is the rotor.