On the Generation of Cutting Planes Which Maximize the Bound Improvement
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A Branch-And-Price Approach with Milp Formulation to Modularity Density Maximization on Graphs
A BRANCH-AND-PRICE APPROACH WITH MILP FORMULATION TO MODULARITY DENSITY MAXIMIZATION ON GRAPHS KEISUKE SATO Signalling and Transport Information Technology Division, Railway Technical Research Institute. 2-8-38 Hikari-cho, Kokubunji-shi, Tokyo 185-8540, Japan YOICHI IZUNAGA Information Systems Research Division, The Institute of Behavioral Sciences. 2-9 Ichigayahonmura-cho, Shinjyuku-ku, Tokyo 162-0845, Japan Abstract. For clustering of an undirected graph, this paper presents an exact algorithm for the maximization of modularity density, a more complicated criterion to overcome drawbacks of the well-known modularity. The problem can be interpreted as the set-partitioning problem, which reminds us of its integer linear programming (ILP) formulation. We provide a branch-and-price framework for solving this ILP, or column generation combined with branch-and-bound. Above all, we formulate the column gen- eration subproblem to be solved repeatedly as a simpler mixed integer linear programming (MILP) problem. Acceleration tech- niques called the set-packing relaxation and the multiple-cutting- planes-at-a-time combined with the MILP formulation enable us to optimize the modularity density for famous test instances in- cluding ones with over 100 vertices in around four minutes by a PC. Our solution method is deterministic and the computation time is not affected by any stochastic behavior. For one of them, column generation at the root node of the branch-and-bound tree arXiv:1705.02961v3 [cs.SI] 27 Jun 2017 provides a fractional upper bound solution and our algorithm finds an integral optimal solution after branching. E-mail addresses: (Keisuke Sato) [email protected], (Yoichi Izunaga) [email protected]. -
Mathematical Programming Lecture 19 OR 630 Fall 2005 November 1, 2005 Notes by Nico Diener
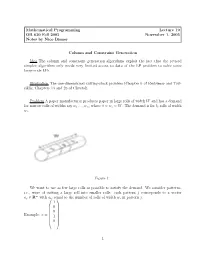
Mathematical Programming Lecture 19 OR 630 Fall 2005 November 1, 2005 Notes by Nico Diener Column and Constraint Generation Idea The column and constraint generation algorithms exploit the fact that the revised simplex algorithm only needs very limited access to data of the LP problem to solve some large-scale LPs. Illustration The one-dimensional cutting-stock problem (Chapter 6 of Bertsimas and Tsit- siklis, Chapters 13 and 26 of Chvatal). Problem A paper manufacturer produces paper in large rolls of width W and has a demand for narrow rolls of widths say w1, ..., wn, where 0 < wi < W . The demand is for bi rolls of width wi. Figure 1: We want to use as few large rolls as possible to satisfy the demand. We consider patterns, i.e., ways of cutting a large roll into smaller rolls: each pattern j corresponds to a vector m aj ∈ R with aij equal to the number of rolls of width wi in pattern j. 1 0 0 Example: a = 1 . 0 . . 1 If we could list all patterns say 1, 2, ..., N (N can be very large), then the problem would become: PN min j=1 xj PN j=1 ajxj = b, (1) xj ≥ 0 ∀j. Actually: We want xj, the number of rolls cut in pattern j, integer but we are just going to consider the LP relaxation. Problem N is large and A (the matrix made of columns aj) is known only implicitly: m PN Any vector a ∈ R satisfying i=1 wiai ≤ W , ai ≥ 0 and integer, defines a column of A. -

Column Generation for Linear and Integer Programming
Documenta Math. 65 Column Generation for Linear and Integer Programming George L. Nemhauser 2010 Mathematics Subject Classification: 90 Keywords and Phrases: Column generation, decomposition, linear programming, integer programming, set partitioning, branch-and- price 1 The beginning – linear programming Column generation refers to linear programming (LP) algorithms designed to solve problems in which there are a huge number of variables compared to the number of constraints and the simplex algorithm step of determining whether the current basic solution is optimal or finding a variable to enter the basis is done by solving an optimization problem rather than by enumeration. To the best of my knowledge, the idea of using column generation to solve linear programs was first proposed by Ford and Fulkerson [16]. However, I couldn’t find the term column generation in that paper or the subsequent two seminal papers by Dantzig and Wolfe [8] and Gilmore and Gomory [17,18]. The first use of the term that I could find was in [3], a paper with the title “A column generation algorithm for a ship scheduling problem”. Ford and Fulkerson [16] gave a formulation for a multicommodity maximum flow problem in which the variables represented path flows for each commodity. The commodities represent distinct origin-destination pairs and integrality of the flows is not required. This formulation needs a number of variables ex- ponential in the size of the underlying network since the number of paths in a graph is exponential in the size of the network. What motivated them to propose this formulation? A more natural and smaller formulation in terms of the number of constraints plus the numbers of variables is easily obtained by using arc variables rather than path variables. -

Branch-And-Price: Column Generation for Solving Huge Integer Programs ,Y
BranchandPrice Column Generation for y Solving Huge Integer Programs Cynthia Barnhart Ellis L Johnson George L Nemhauser Martin WPSavelsb ergh Pamela H Vance School of Industrial and Systems Engineering Georgia Institute of Technology Atlanta GA Abstract We discuss formulations of integer programs with a huge number of variables and their solution by column generation metho ds ie implicit pricing of nonbasic variables to generate new columns or to prove LP optimality at a no de of the branch andb ound tree We present classes of mo dels for whichthisapproach decomp oses the problem provides tighter LP relaxations and eliminates symmetryWethen discuss computational issues and implementation of column generation branchand b ound algorithms including sp ecial branching rules and ecientways to solvethe LP relaxation February Revised May Revised January Intro duction The successful solution of largescale mixed integer programming MIP problems re quires formulations whose linear programming LP relaxations give a go o d approxima Currently at MIT Currently at Auburn University This research has b een supp orted by the following grants and contracts NSF SES NSF and AFORS DDM NSF DDM NSF DMI and IBM MHV y An abbreviated and unrefereed version of this pap er app eared in Barnhart et al tion to the convex hull of feasible solutions In the last decade a great deal of attention has b een given to the branchandcut approach to solving MIPs Homan and Padb erg and Nemhauser and Wolsey give general exp ositions of this metho dology The basic -

Column Generation Algorithms for Nonlinear Optimization, II: Numerical
Column generation algorithms for nonlinear optimization, II: Numerical investigations Ricardo Garcia-Rodenas a, Angel Marinb'*, Michael Patriksson c,d a Universidad de Castilla La Mancha, Escuela Superior de Informatica, Paseo de la Universidad, 4, 13071 Ciudad Real, Spain b Universidad Politecnica de Madrid, Escuela Tecnica Superior de Ingenieros Aeronauticos, Plaza Cardenal Cisneros, 3, 28040 Madrid, Spain c Department of Mathematical Sciences, Chalmers University of Technology, SE-412 96 Goteborg, Sweden d Department of Mathematical Sciences, University of Gothenburg, SE-412 96 Goteborg, Sweden ABSTRACT Garcia et al. [1] present a class of column generation (CG) algorithms for nonlinear programs. Its main motivation from a theoretical viewpoint is that under some circumstances, finite convergence can be achieved, in much the same way as for the classic simplicial decomposition method; the main practical motivation is that within the class there are certain nonlinear column generation problems that can accelerate the convergence of a solution approach which generates a sequence of feasible points. This algorithm can, for example, accelerate simplicial decomposition schemes by making the subproblems nonlinear. This paper complements the theoretical study on the asymptotic and finite convergence of these methods given in [1] with an experimental study focused on their computational efficiency. Three types of numerical experiments are conducted. The first group of test problems has been designed to study the parameters involved in these methods. The second group has been designed to investigate the role and the computation of the prolongation of the generated columns to the relative boundary. The last one has been designed to carry out a more complete investigation of the difference in computational efficiency between linear and nonlinear column generation approaches. -
![Arxiv:1907.01541V2 [Math.OC] 1 Jun 2020 to Which Positive Mass Is Associated), but Are Supported on the Same Structured Set (A Pixel Grid)](https://docslib.b-cdn.net/cover/1762/arxiv-1907-01541v2-math-oc-1-jun-2020-to-which-positive-mass-is-associated-but-are-supported-on-the-same-structured-set-a-pixel-grid-1981762.webp)
Arxiv:1907.01541V2 [Math.OC] 1 Jun 2020 to Which Positive Mass Is Associated), but Are Supported on the Same Structured Set (A Pixel Grid)
A Column Generation Approach to the Discrete Barycenter Problem Steffen Borgwardt1 and Stephan Patterson2 1 [email protected]; University of Colorado Denver 2 [email protected]; University of Colorado Denver Abstract. The discrete Wasserstein barycenter problem is a minimum-cost mass transport problem for a set of discrete probability measures. Although a barycenter is computable through linear pro- gramming, the underlying linear program can be extremely large. For worst-case input, the best known linear programming formulation is exponential in the number of variables but contains an extremely low number of constraints, making it a prime candidate for column generation. In this paper, we devise a column generation strategy through a Dantzig-Wolfe decomposition of the linear program. Critical to the success of an efficient computation, we produce efficiently solvable subproblems, namely, a pricing problem in the form of a classical transportation problem. Further, we describe two efficient methods for constructing an initial feasible restricted master problem, and we use the structure of the constraints for a memory-efficient implementation. We support our algorithm with some computational experiments that demonstrate significant improvement in the memory requirements and running times compared to a computation using the full linear program. Keywords: discrete barycenter, optimal transport, linear programming, column generation MSC 2010: 49M27, 90B80, 90C05, 90C08, 90C46 1 Introduction Optimal transport problems involving joint transport to a set of probability measures appear in a variety of fields, including recent work in image processing [15,22], machine learning [14,21,27], and graph theory [25], to name but a few. A barycenter is another probability measure which minimizes the total distance to all input measures (i.e, images) and acts as an average distribution in the probability space. -

Column Generation Algorithms for Nonlinear Optimization, I: Convergence Analysis
Column generation algorithms for nonlinear optimization, I: Convergence analysis Ricardo Garc´ıa,∗ Angel Mar´ın,† and Michael Patriksson‡ October 10, 2002 Abstract Column generation is an increasingly popular basic tool for the solution of large-scale mathematical programming problems. As problems being solved grow bigger, column gener- ation may however become less efficient in its present form, where columns typically are not optimizing, and finding an optimal solution instead entails finding an optimal convex com- bination of a huge number of them. We present a class of column generation algorithms in which the columns defining the restricted master problem may be chosen to be optimizing in the limit, thereby reducing the total number of columns needed. This first paper is devoted to the convergence properties of the algorithm class, and includes global (asymptotic) con- vergence results for differentiable minimization, finite convergence results with respect to the optimal face and the optimal solution, and extensions of these results to variational inequal- ity problems. An illustration of its possibilities is made on a nonlinear network flow model, contrasting its convergence characteristics to that of the restricted simplicial decomposition (RSD) algorithm. Key words: Column generation, simplicial decomposition, inner approximation, sim- plices, column dropping, optimal face, non-degeneracy, pseudo-convex minimization, weak sharpness, finite convergence, pseudo-monotone+ mapping, variational inequalities. 1 Introduction 1.1 Origin and use Column generation (CG for short) is a classic and increasingly popular means to attack large- scale problems in mathematical programming. A column generation algorithm can, roughly, be said to proceed according to the following two steps, used iteratively in succession: (1) A relaxation of the original problem is constructed, based on current estimates of the optimal solution. -

A Branch-And-Price Algorithm for Combined Location and Routing Problems Under Capacity Restrictions
A Branch-and-Price Algorithm for Combined Location and Routing Problems Under Capacity Restrictions Z. Akca ∗ R.T. Berger † T.K Ralphs ‡ September 17, 2008 Abstract We investigate the problem of simultaneously determining the location of facilities and the design of vehicle routes to serve customer demands under vehicle and facility capacity restrictions. We present a set-partitioning-based formulation of the problem and study the relationship between this formulation and the graph-based formulations that have been used in previous studies of this problem. We describe a branch-and-price algorithm based on the set-partitioning formulation and discuss computational experi- ence with both exact and heuristic variants of this algorithm. 1 Introduction The design of a distribution system begins with the questions of where to locate the facilities and how to allo- cate customers to the selected facilities. These questions can be answered using location-allocation models, which are based on the assumption that customers are served individually on out-and-back routes. How- ever, when customers have demands that are less-than-truckload and thus can receive service from routes making multiple stops, the assumption of individual routes will not accurately capture the transportation cost. Therefore, the integration of location-allocation and routing decisions may yield more accurate and cost-effective solutions. In this paper, we investigate the so-called location and routing problem (LRP). Given a set of candidate facility locations and a set of customer locations, the objective of the LRP is to determine the number and location of facilities and construct a set of vehicle routes from facilities to customers in such a way as to minimize total system cost. -

A Column Generation Based Decomposition Algorithm for A
A Column Generation Based Decomp osition Algorithm for a Parallel Machine Just-In-Time Scheduling Problem Zhi-Long Chen Department of Systems Engineering UniversityofPennsylvania Philadelphia, PA 19104-6315 Email: [email protected] enn.edu Warren B. Powell Department of Civil Engineering & Op erations Research Princeton University Princeton, NJ 08544, USA Octob er 1997 abstract We prop ose a column generation based exact decomp osition algorithm for the problem of scheduling n jobs with an unrestrictively large common due date on m identical par- allel machines to minimize total weighted earliness and tardiness. We rst formulate the problem as an integer program, then reformulate it, using Dantzig-Wolfe decomp osition, as a set partitioning problem with side constraints. Based on this set partitioning for- mulation, a branch and b ound exact solution algorithm is develop ed for the problem. In the branch and b ound tree, each no de is the linear relaxation problem of a set partition- ing problem with side constraints. This linear relaxation problem is solved by column generation approach where columns represent partial schedules on single machines and are generated by solving two single machine subproblems. Our computational results show that this decomp osition algorithm is capable of solving problems with up to 60 jobs in reasonable cpu time. Key words: Parallel machine scheduling; Just-in-time; Set partitioning; Dantzig- Wolfe decomp osition; Column generation; Branch and b ound 1 1 Intro duction The current emphasis on the Just-In-Time JIT philosophy in industry has motivated the study of the scheduling mo dels capable of capturing the essence of this idea. -

Cqboost : a Column Generation Method for Minimizing the C-Bound
CqBoost : A Column Generation Method for Minimizing the C-Bound Franc¸ois Laviolette, Mario Marchand, Jean-Francis Roy Departement´ d’informatique et de genie´ logiciel, Universite´ Laval Quebec´ (QC), Canada [email protected] Abstract The C-bound, introduced in Lacasse et al. [1], gives a tight upper bound of a ma- jority vote classifier. Laviolette et al. [2] designed a learning algorithm named MinCq that outputs a dense distribution on a set of base classifiers by minimiz- ing the C-bound, together with a PAC-Bayesian generalization guarantee. In this work, we use optimization techniques to design a column generation algorithm that optimizes the C-bound and outputs particularly sparse solutions. 1 Introduction Many state-of-the-art binary classification learning algorithms, such as Bagging [3], Boosting [4], and Random Forests [5], output prediction functions that can be seen as a majority vote of “simple” classifiers. Majority votes are also central in the Bayesian approach (see Gelman et al. [6] for an introductory text). Moreover, classifiers produced by kernel methods, such as the Support Vector Machine [7], can also be viewed as majority votes. Indeed, to classify an example x, the SVM PjSj classifier computes sgn i=1 αi yi k(xi; x) . Hence, as for standard binary majority votes, if the total weight of each αi yi k(xi; x) that votes positive is larger than the total weight for the negative choice, the classifier will output a +1 label (and a −1 label in the opposite case). Most bounds on majority votes take into account the margin of the majority vote on an example (x; y), that is the difference between the total vote weight that has been given to the winning class minus the weight given to the alternative class. -

Column Generation Based Primal Heuristics
Column Generation based Primal Heuristics Cédric Joncour(1), Sophie Michel (2), Ruslan Sadykov (3,1), Dimitri Sverdlov (3,1), François Vanderbeck (1,3) (1) Université Bordeaux 1, Institut de Mathématiques (2) Institut supérieur d’études logistiques- Université du Havre (3) INRIA Bordeaux, équipe RealOpt Abstract In the past decade, significant progress has been achieved in developing generic pri- mal heuristics that made their way into commercial mixed integer programming (MIP) solver. Extensions to the context of a column generation solution approach are not straightforward. The Dantzig-Wolfe decomposition principle can indeed be exploited in greedy, local search, rounding or truncated exact methods. The price coordination mechanism can bring a global view that may be lacking in some “my- opic” approaches based on a compact formulation. However, the dynamic generation of variables requires specific adaptation of heuristic paradigms. The column gen- eration literature reports many application specific studies where primal heuristics are a key to success. There remains to extract generic methods that could be seen as black-box primal heuristics for use across applications. In this paper we review generic classes of column generation based primal heuristics. We then focus on a so-called “diving” method in which we introduce diversification based on Limited Discrepancy Search. While being a general purpose approach, the implementation of our heuristic illustrates the technicalities specific to column generation. The method is numerically tested on variants of the cutting stock and vehicle routing problems. Keywords: Primal Heuristic, Column Generation. 1 Introduction Heuristics are algorithms that attempts to derive “good” primal feasible so- lutions to a combinatorial optimization problem. -

Large-Scale Optimization with the Primal-Dual Column Generation Method
Large-scale optimization with the primal-dual column generation method Jacek Gondzio∗ Pablo Gonz´alez-Brevisy Pedro Munariz School of Mathematics, University of Edinburgh The King's Buildings, Edinburgh, EH9 3JZ, UK Technical Report ERGO 13-014, January 22, 2015. Abstract The primal-dual column generation method (PDCGM) is a general-purpose column gen- eration technique that relies on the primal-dual interior point method to solve the restricted master problems. The use of this interior point method variant allows to obtain subopti- mal and well-centered dual solutions which naturally stabilizes the column generation. As recently presented in the literature, reductions in the number of calls to the oracle and in the CPU times are typically observed when compared to the standard column gener- ation, which relies on extreme optimal dual solutions. However, these results are based on relatively small problems obtained from linear relaxations of combinatorial applications. In this paper, we investigate the behaviour of the PDCGM in a broader context, namely when solving large-scale convex optimization problems. We have selected applications that arise in important real-life contexts such as data analysis (multiple kernel learning prob- lem), decision-making under uncertainty (two-stage stochastic programming problems) and telecommunication and transportation networks (multicommodity network flow problem). In the numerical experiments, we use publicly available benchmark instances to compare the performance of the PDCGM against recent results for different methods presented in the literature, which were the best available results to date. The analysis of these results suggests that the PDCGM offers an attractive alternative over specialized methods since it remains competitive in terms of number of iterations and CPU times even for large-scale optimization problems.