The Broker Queue: a Fast, Linearizable FIFO Queue for Fine-Granular Work Distribution on the GPU Bernhard Kerbl, Michael Kenzel, Joerg H
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Concurrent Objects and Linearizability Concurrent Computaton
Concurrent Objects and Concurrent Computaton Linearizability memory Nir Shavit Subing for N. Lynch object Fall 2003 object © 2003 Herlihy and Shavit 2 Objectivism FIFO Queue: Enqueue Method • What is a concurrent object? q.enq( ) – How do we describe one? – How do we implement one? – How do we tell if we’re right? © 2003 Herlihy and Shavit 3 © 2003 Herlihy and Shavit 4 FIFO Queue: Dequeue Method Sequential Objects q.deq()/ • Each object has a state – Usually given by a set of fields – Queue example: sequence of items • Each object has a set of methods – Only way to manipulate state – Queue example: enq and deq methods © 2003 Herlihy and Shavit 5 © 2003 Herlihy and Shavit 6 1 Pre and PostConditions for Sequential Specifications Dequeue • If (precondition) – the object is in such-and-such a state • Precondition: – before you call the method, – Queue is non-empty • Then (postcondition) • Postcondition: – the method will return a particular value – Returns first item in queue – or throw a particular exception. • Postcondition: • and (postcondition, con’t) – Removes first item in queue – the object will be in some other state • You got a problem with that? – when the method returns, © 2003 Herlihy and Shavit 7 © 2003 Herlihy and Shavit 8 Pre and PostConditions for Why Sequential Specifications Dequeue Totally Rock • Precondition: • Documentation size linear in number –Queue is empty of methods • Postcondition: – Each method described in isolation – Throws Empty exception • Interactions among methods captured • Postcondition: by side-effects -
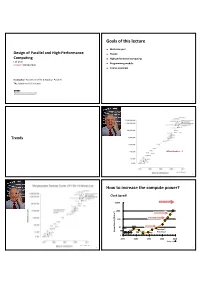
Goals of This Lecture How to Increase the Compute Power?
Goals of this lecture Motivate you! Design of Parallel and High-Performance Trends Computing High performance computing Fall 2017 Programming models Lecture: Introduction Course overview Instructor: Torsten Hoefler & Markus Püschel TA: Salvatore Di Girolamo 2 © Markus Püschel Computer Science Trends What doubles …? Source: Wikipedia 3 4 How to increase the compute power? Clock Speed! 10000 Sun’s Surface 1000 ) 2 Rocket Nozzle Nuclear Reactor 100 10 8086 Hot Plate 8008 8085 Pentium® Power Density (W/cm Power 4004 286 386 486 Processors 8080 1 1970 1980 1990 2000 2010 Source: Intel Source: Wikipedia 5 6 How to increase the compute power? Evolutions of Processors (Intel) Not an option anymore! Clock Speed! 10000 Sun’s Surface 1000 ) 2 Rocket Nozzle Nuclear Reactor 100 ~3 GHz Pentium 4 Core Nehalem Haswell Pentium III Sandy Bridge Hot Plate 10 8086 Pentium II 8008 free speedup 8085 Pentium® Pentium Pro Power Density (W/cm Power 4004 286 386 486 Processors 8080 Pentium 1 1970 1980 1990 2000 2010 Source: Intel 7 8 Source: Wikipedia/Intel/PCGuide Evolutions of Processors (Intel) Evolutions of Processors (Intel) Cores: 8x ~360 Gflop/s Vector units: 8x parallelism: work required 2 2 4 4 4 8 cores ~3 GHz Pentium 4 Core Nehalem Haswell Pentium III Sandy Bridge Pentium II Pentium Pro free speedup Pentium memory bandwidth (normalized) 9 10 Source: Wikipedia/Intel/PCGuide Source: Wikipedia/Intel/PCGuide A more complete view Source: www.singularity.com Can we do this today? 11 12 © Markus Püschel Computer Science High-Performance Computing (HPC) a.k.a. “Supercomputing” Question: define “Supercomputer”! High-Performance Computing 13 14 High-Performance Computing (HPC) a.k.a. -

Core Processors
UNIVERSITY OF CALIFORNIA Los Angeles Parallel Algorithms for Medical Informatics on Data-Parallel Many-Core Processors A dissertation submitted in partial satisfaction of the requirements for the degree Doctor of Philosophy in Computer Science by Maryam Moazeni 2013 © Copyright by Maryam Moazeni 2013 ABSTRACT OF THE DISSERTATION Parallel Algorithms for Medical Informatics on Data-Parallel Many-Core Processors by Maryam Moazeni Doctor of Philosophy in Computer Science University of California, Los Angeles, 2013 Professor Majid Sarrafzadeh, Chair The extensive use of medical monitoring devices has resulted in the generation of tremendous amounts of data. Storage, retrieval, and analysis of such data require platforms that can scale with data growth and adapt to the various behavior of the analysis and processing algorithms. In recent years, many-core processors and more specifically many-core Graphical Processing Units (GPUs) have become one of the most promising platforms for high performance processing of data, due to the massive parallel processing power they offer. However, many of the algorithms and data structures used in medical and bioinformatics systems do not follow a data-parallel programming paradigm, and hence cannot fully benefit from the parallel processing power of ii data-parallel many-core architectures. In this dissertation, we present three techniques to adapt several non-data parallel applications in different dwarfs to modern many-core GPUs. First, we present a load balancing technique to maximize parallelism in non-serial polyadic Dynamic Programming (DP), which is a family of dynamic programming algorithms with more non-uniform data access pattern. We show that a bottom-up approach to solving the DP problem exploits more parallelism and therefore yields higher performance. -

Concurrent and Parallel Programming
Concurrent and parallel programming Seminars in Advanced Topics in Computer Science Engineering 2019/2020 Romolo Marotta Trend in processor technology Concurrent and parallel programming 2 Blocking synchronization SHARED RESOURCE Concurrent and parallel programming 3 Blocking synchronization …zZz… SHARED RESOURCE Concurrent and parallel programming 4 Blocking synchronization Correctness guaranteed by mutual exclusion …zZz… SHARED RESOURCE Performance might be hampered because of waste of clock cycles Liveness might be impaired due to the arbitration of accesses Concurrent and parallel programming 5 Parallel programming • Ad-hoc concurrent programming languages • Development tools ◦ Compilers ◦ MPI, OpenMP, libraries ◦ Tools to debug parallel code (gdb, valgrind) • Writing parallel code is an art ◦ There are approaches, not prepackaged solutions ◦ Every machine has its own singularities ◦ Every problem to face has different requisites ◦ The most efficient parallel algorithm might not be the most intuitive one Concurrent and parallel programming 6 What do we want from parallel programs? • Safety: nothing wrong happens (Correctness) ◦ parallel versions of our programs should be correct as their sequential implementations • Liveliness: something good happens eventually (Progress) ◦ if a sequential program terminates with a given input, we want that its parallel alternative also completes with the same input • Performance ◦ we want to exploit our parallel hardware Concurrent and parallel programming 7 Correctness conditions Progress conditions -
![Arxiv:2012.03692V1 [Cs.DC] 7 Dec 2020](https://docslib.b-cdn.net/cover/5194/arxiv-2012-03692v1-cs-dc-7-dec-2020-1485194.webp)
Arxiv:2012.03692V1 [Cs.DC] 7 Dec 2020
Separation and Equivalence results for the Crash-stop and Crash-recovery Shared Memory Models Ohad Ben-Baruch Srivatsan Ravi Ben-Gurion University, Israel University of Southern California, USA [email protected] [email protected] December 8, 2020 Abstract Linearizability, the traditional correctness condition for concurrent data structures is considered insufficient for the non-volatile shared memory model where processes recover following a crash. For this crash-recovery shared memory model, strict-linearizability is considered appropriate since, unlike linearizability, it ensures operations that crash take effect prior to the crash or not at all. This work formalizes and answers the question of whether an implementation of a data type derived for the crash-stop shared memory model is also strict-linearizable in the crash-recovery model. This work presents a rigorous study to prove how helping mechanisms, typically employed by non-blocking implementations, is the algorithmic abstraction that delineates linearizabil- ity from strict-linearizability. Our first contribution formalizes the crash-recovery model and how explicit process crashes and recovery introduces further dimensionalities over the stan- dard crash-stop shared memory model. We make the following technical contributions that answer the question of whether a help-free linearizable implementation is strict-linearizable in the crash-recovery model: (i) we prove surprisingly that there exist linearizable imple- mentations of object types that are help-free, yet not strict-linearizable; (ii) we then present a natural definition of help-freedom to prove that any obstruction-free, linearizable and help-free implementation of a total object type is also strict-linearizable. The next technical contribution addresses the question of whether a strict-linearizable implementation in the crash-recovery model is also help-free linearizable in the crash-stop model. -

A Task Parallel Approach Bachelor Thesis Paul Blockhaus
Otto-von-Guericke-University Magdeburg Faculty of Computer Science Department of Databases and Software Engineering Parallelizing the Elf - A Task Parallel Approach Bachelor Thesis Author: Paul Blockhaus Advisors: Prof. Dr. rer. nat. habil. Gunter Saake Dr.-Ing. David Broneske Otto-von-Guericke-University Magdeburg Department of Databases and Software Engineering Dr.-Ing. Martin Schäler Karlsruhe Institute of Technology Department of Databases and Information Systems Magdeburg, November 29, 2019 Acknowledgements First and foremost I wish to thank my advisor, Dr.-Ing. David Broneske for sparking my interest in database systems, introducing me to the Elf and supporting me throughout the work on this thesis. I would also like to thank Prof. Dr. rer. nat. habil. Gunter Saake for the opportunity to write this thesis in the DBSE research group. Also a big thank you to Dr.-Ing. Martin Schäler for his valuable feedback. Finally I want to thank my family and my cat for their support and encouragement throughout my study. Abstract Analytical database queries become more and more compute intensive while at the same time the computing power of the CPUs stagnates. This leads to new approaches to accelerate complex selection predicates, which are common in analytical queries. One state of the art approach is the Elf, a highly optimized tree structure which utilizes prefix sharing to optimize multi-predicate selection queries to aim for bare metal speed. However, this approach leaves many capabilities that modern hardware offers aside. One of the most popular capabilities that results in huge speed-ups is the utilization of multiple cores, offered by modern CPUs. -

Round-Up: Runtime Checking Quasi Linearizability Of
Round-Up: Runtime Checking Quasi Linearizability of Concurrent Data Structures Lu Zhang, Arijit Chattopadhyay, and Chao Wang Department of ECE, Virginia Tech Blacksburg, VA 24061, USA {zhanglu, arijitvt, chaowang }@vt.edu Abstract —We propose a new method for runtime checking leading to severe performance bottlenecks. Quasi linearizabil- of a relaxed consistency property called quasi linearizability for ity preserves the intuition of standard linearizability while concurrent data structures. Quasi linearizability generalizes the providing some additional flexibility in the implementation. standard notion of linearizability by intentionally introducing nondeterminism into the parallel computations and exploiting For example, the task queue used in the scheduler of a thread such nondeterminism to improve the performance. However, pool does not need to follow the strict FIFO order. One can ensuring the quantitative aspects of this correctness condition use a relaxed queue that allows some tasks to be overtaken in the low level code is a difficult task. Our method is the occasionally if such relaxation leads to superior performance. first fully automated method for checking quasi linearizability Similarly, concurrent data structures used for web cache need in the unmodified C/C++ code of concurrent data structures. It guarantees that all the reported quasi linearizability violations not follow the strict semantics of the standard versions, since are real violations. We have implemented our method in a occasionally getting the stale data is acceptable. In distributed software tool based on LLVM and a concurrency testing tool systems, the unique id generator does not need to be a perfect called Inspect. Our experimental evaluation shows that the new counter; to avoid becoming a performance bottleneck, it is method is effective in detecting quasi linearizability violations in often acceptable for the ids to be out of order occasionally, the source code of concurrent data structures. -

Local Linearizability for Concurrent Container-Type Data Structures∗
Local Linearizability for Concurrent Container-Type Data Structures∗ Andreas Haas1, Thomas A. Henzinger2, Andreas Holzer3, Christoph M. Kirsch4, Michael Lippautz5, Hannes Payer6, Ali Sezgin7, Ana Sokolova8, and Helmut Veith9 1 Google Inc. 2 IST Austria, Austria 3 University of Toronto, Canada 4 University of Salzburg, Austria 5 Google Inc. 6 Google Inc. 7 University of Cambridge, UK 8 University of Salzburg, Austria 9 Vienna University of Technology, Austria and Forever in our hearts Abstract The semantics of concurrent data structures is usually given by a sequential specification and a consistency condition. Linearizability is the most popular consistency condition due to its sim- plicity and general applicability. Nevertheless, for applications that do not require all guarantees offered by linearizability, recent research has focused on improving performance and scalability of concurrent data structures by relaxing their semantics. In this paper, we present local linearizability, a relaxed consistency condition that is applicable to container-type concurrent data structures like pools, queues, and stacks. While linearizability requires that the effect of each operation is observed by all threads at the same time, local linearizability only requires that for each thread T, the effects of its local insertion operations and the effects of those removal operations that remove values inserted by T are observed by all threads at the same time. We investigate theoretical and practical properties of local linearizability and its relationship to many existing consistency conditions. We present a generic implementation method for locally linearizable data structures that uses existing linearizable data structures as building blocks. Our implementations show performance and scalability improvements over the original building blocks and outperform the fastest existing container-type implementations. -

Efficient Lock-Free Durable Sets 128:3
Efficient Lock-Free Durable Sets∗ YOAV ZURIEL, Technion, Israel MICHAL FRIEDMAN, Technion, Israel GALI SHEFFI, Technion, Israel NACHSHON COHEN†, Amazon, Israel EREZ PETRANK, Technion, Israel Non-volatile memory is expected to co-exist or replace DRAM in upcoming architectures. Durable concurrent data structures for non-volatile memories are essential building blocks for constructing adequate software for use with these architectures. In this paper, we propose a new approach for durable concurrent sets and use this approach to build the most efficient durable hash tables available today. Evaluation shows a performance improvement factor of up to 3.3x over existing technology. CCS Concepts: • Hardware → Non-volatile memory; • Software and its engineering → Concurrent programming structures. Additional Key Words and Phrases: Concurrent Data Structures, Non-Volatile Memory, Lock Freedom, Hash Maps, Durable Linearizability, Durable Sets ACM Reference Format: Yoav Zuriel, Michal Friedman, Gali Sheffi, Nachshon Cohen, and Erez Petrank. 2019. Efficient Lock-Free Durable Sets. Proc. ACM Program. Lang. 3, OOPSLA, Article 128 (October 2019), 47 pages. https://doi.org/10.1145/3360554 1 INTRODUCTION An up-and-coming innovative technological advancement is non-volatile RAM (NVRAM). This new memory architecture combines the advantages of DRAM and SSD. The latencies of NVRAM are expected to come close to DRAM, and it can be accessed at the byte level using standard store and load operations, in contrast to SSD, which is much slower and can be accessed only at a block level. Unlike DRAM, the storage of NVRAM is persistent, meaning that after a power failure and a reset, all data written to the NVRAM is saved [Zhang and Swanson 2015]. -

LL/SC and Atomic Copy: Constant Time, Space Efficient
LL/SC and Atomic Copy: Constant Time, Space Efficient Implementations using only pointer-width CAS Guy E. Blelloch1 and Yuanhao Wei1 1Carnegie Mellon University, USA {guyb, yuanhao1}@cs.cmu.edu March 3, 2020 Abstract When designing concurrent algorithms, Load-Link/Store-Conditional (LL/SC) is often the ideal primi- tive to have because unlike Compare and Swap (CAS), LL/SC is immune to the ABA problem. Unfortu- nately, the full semantics of LL/SC are not supported in hardware by any modern architecture, so there has been a significant amount of work on simulations of LL/SC using CAS, a synchronization primitive that enjoys widespread hardware support. However, all of the algorithms so far that are constant time either use unbounded sequence numbers (and thus base objects of unbounded size), or require Ω(MP ) space for M LL/SC object (where P is the number of processes). We present a constant time implementation of M LL/SC objects using Θ(M + kP 2) space (where k is the number of outstanding LL operations per process) and requiring only pointer-sized CAS objects. In particular, using pointer-sized CAS objects means that we do not use unbounded sequence numbers. For most algorithms that use LL/SC, k is a small constant, so this result implies that these algorithms can be implemented directly from CAS objects of the same size with asymptotically no time overhead and Θ(P 2) additive space overhead. This Θ(P 2) extra space is paid for once across all the algorithms running on a system, so asymptotically, there is little benefit to using CAS over LL/SC. -

Wait-Freedom Is Harder Than Lock-Freedom Under Strong Linearizability Oksana Denysyuk, Philipp Woelfel
Wait-Freedom is Harder than Lock-Freedom under Strong Linearizability Oksana Denysyuk, Philipp Woelfel To cite this version: Oksana Denysyuk, Philipp Woelfel. Wait-Freedom is Harder than Lock-Freedom under Strong Lin- earizability. DISC 2015, Toshimitsu Masuzawa; Koichi Wada, Oct 2015, Tokyo, Japan. 10.1007/978- 3-662-48653-5_5. hal-01199821 HAL Id: hal-01199821 https://hal.archives-ouvertes.fr/hal-01199821 Submitted on 16 Sep 2015 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Wait-Freedom is Harder than Lock-Freedom under Strong Linearizability Oksana Denysyuk and Philipp Woelfel Department of Computer Science, University of Calgary, Canada foksana.denysyuk,[email protected] Abstract. In randomized algorithms, replacing atomic shared objects with linearizable [1] implementations may affect probability distributions over outcomes [2]. To avoid this problem in the adaptive adversary model, it is necessary and sufficient that implemented objects satisfy strong lin- earizability [2]. In this paper we study the existence of strongly lineariz- able implementations from multi-writer registers. We prove the impossi- bility of wait-free strongly linearizable implementations for a number of standard objects, including snapshots, counters, and max-registers, all of which have wait-free linearizable implementations. -

Root Causing Linearizability Violations⋆
? fact ti * Root Causing Linearizability Violations r * Comple t te n * A A te is W E s e n C l * l o D C o * V * c u e A m s E u e e C n R t v e o d t * y * s E a a l d 1 1 2 1 u e a Berk Çirisci , Constantin Enea , Azadeh Farzan , and Suha Orhun Mutluergil t 1 Université de Paris, CNRS, IRIF, F-75013 Paris, France {cirisci,cenea,mutluergil}irif.fr 2 University of Toronto, Canada, [email protected] Abstract. Linearizability is the de facto correctness criterion for concur- rent data type implementations. Violation of linearizability is witnessed by an error trace in which the outputs of individual operations do not match those of a sequential execution of the same operations. Extensive work has been done in discovering linearizability violations, but little work has been done in trying to provide useful hints to the programmer when a violation is discovered by a tester tool. In this paper, we propose an approach that identifies the root causes of linearizability errors in the form of code blocks whose atomicity is required to restore linearizability. The key insight of this paper is that the problem can be reduced to a simpler algorithmic problem of identifying minimal root causes of conflict serializability violation in an error trace combined with a heuristic for identifying which of these are more likely to be the true root cause of non-linearizability. We propose theoretical results outlining this reduction, and an algorithm to solve the simpler problem.